
汽车巡航控制.ppt

YY****。。

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共69页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

汽车巡航控制.ppt
汽车巡航控制系统第一章汽车电子巡航控制系统概述由于巡航控制系统能够使汽车自动地以等速行驶,避免了驾驶员操纵加速踏板使汽车行驶车速反复变化的情况。1.1巡航控制系统的发展历程驾驶员操纵巡航控制开关,将车速设定、减速、恢复、加速、取消等命令输入计算机。巡航控制系统的控制过程分类基本功能故障保险功能优点1.2基本组成与原理巡航控制开关和传感器将信号送至ECU,ECU根据这些信号计算出节气门的合理开度,并给执行器发出信号,调节节气门的开度,保持汽车按设定的车速等速行驶。巡航控制开关以丰田车系为例,巡航控制开关包括
汽车巡航控制.ppt
汽车巡航控制系统第一章汽车电子巡航控制系统概述由于巡航控制系统能够使汽车自动地以等速行驶,避免了驾驶员操纵加速踏板使汽车行驶车速反复变化的情况。1.1巡航控制系统的发展历程驾驶员操纵巡航控制开关,将车速设定、减速、恢复、加速、取消等命令输入计算机。巡航控制系统的控制过程分类基本功能故障保险功能优点1.2基本组成与原理巡航控制开关和传感器将信号送至ECU,ECU根据这些信号计算出节气门的合理开度,并给执行器发出信号,调节节气门的开度,保持汽车按设定的车速等速行驶。巡航控制开关以丰田车系为例,巡航控制开关包括
汽车巡航控制.ppt
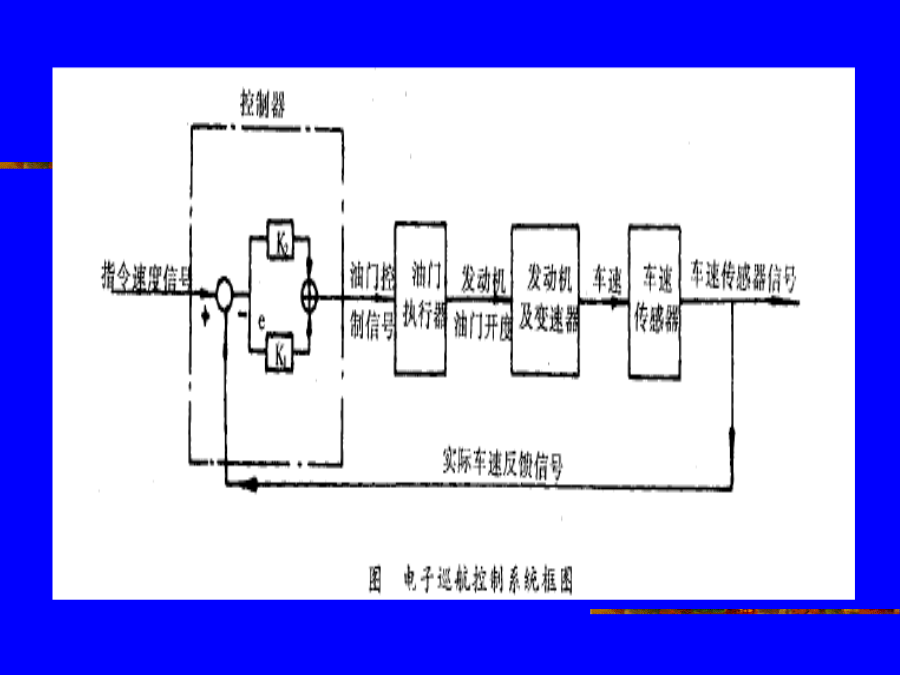
一、汽车巡航控制系统概述1.汽车巡航控制系统的定义2.汽车巡航控制系统的作用3.汽车巡航控制系统的工作原理从上图中可以看出控制器有两种输人信号,一种是驾车人按要求设定的指令信号〔包括恒速、减速、恢复原速、加速命令等),另一种是实际车速的反馈信号。电子控制器检测这两种输人信号之间的误差后产生一个送至油门执行器的油门控制信号。油门控制器根据所接收到的控制信号调节发动机的油门开度,以修正电子控制器所检测到的误差,从而使车速保持恒定。实际车速由车速传感器测得并转换成与车速成正比的电信号反馈至电子控制器。汽车巡航控
汽车巡航控制.ppt
汽车巡航控制系统第一章汽车电子巡航控制系统概述由于巡航控制系统能够使汽车自动地以等速行驶,避免了驾驶员操纵加速踏板使汽车行驶车速反复变化的情况。1.1巡航控制系统的发展历程驾驶员操纵巡航控制开关,将车速设定、减速、恢复、加速、取消等命令输入计算机。巡航控制系统的控制过程分类基本功能故障保险功能优点1.2基本组成与原理巡航控制开关和传感器将信号送至ECU,ECU根据这些信号计算出节气门的合理开度,并给执行器发出信号,调节节气门的开度,保持汽车按设定的车速等速行驶。巡航控制开关以丰田车系为例,巡航控制开关包括

汽车巡航控制系统.ppt
第9章汽车巡航控制系统9.1概述9.1.1巡航控制系统的作用9.1概述9.1.2巡航控制系统的工作原理9.2巡航控制系统的基本结构组成9.2.1巡航控制系统的基本组成9.2巡航控制系统的基本结构组成9.2.2组成元件的结构及作用9.2巡航控制系统的基本结构组成9.2.2组成元件的结构及作用9.2巡航控制系统的基本结构组成9.2.2组成元件的结构及作用9.2巡航控制系统的基本结构组成9.2.2组成元件的结构及作用9.2巡航控制系统的基本结构组成9.2.2组成元件的结构及作用9.2巡航控制系统的基本结构组成9