
流体驱动自适应管道爬行器.pdf

一吃****成益

1/9
2/9

3/9
4/9

5/9

6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

流体驱动自适应管道爬行器.pdf
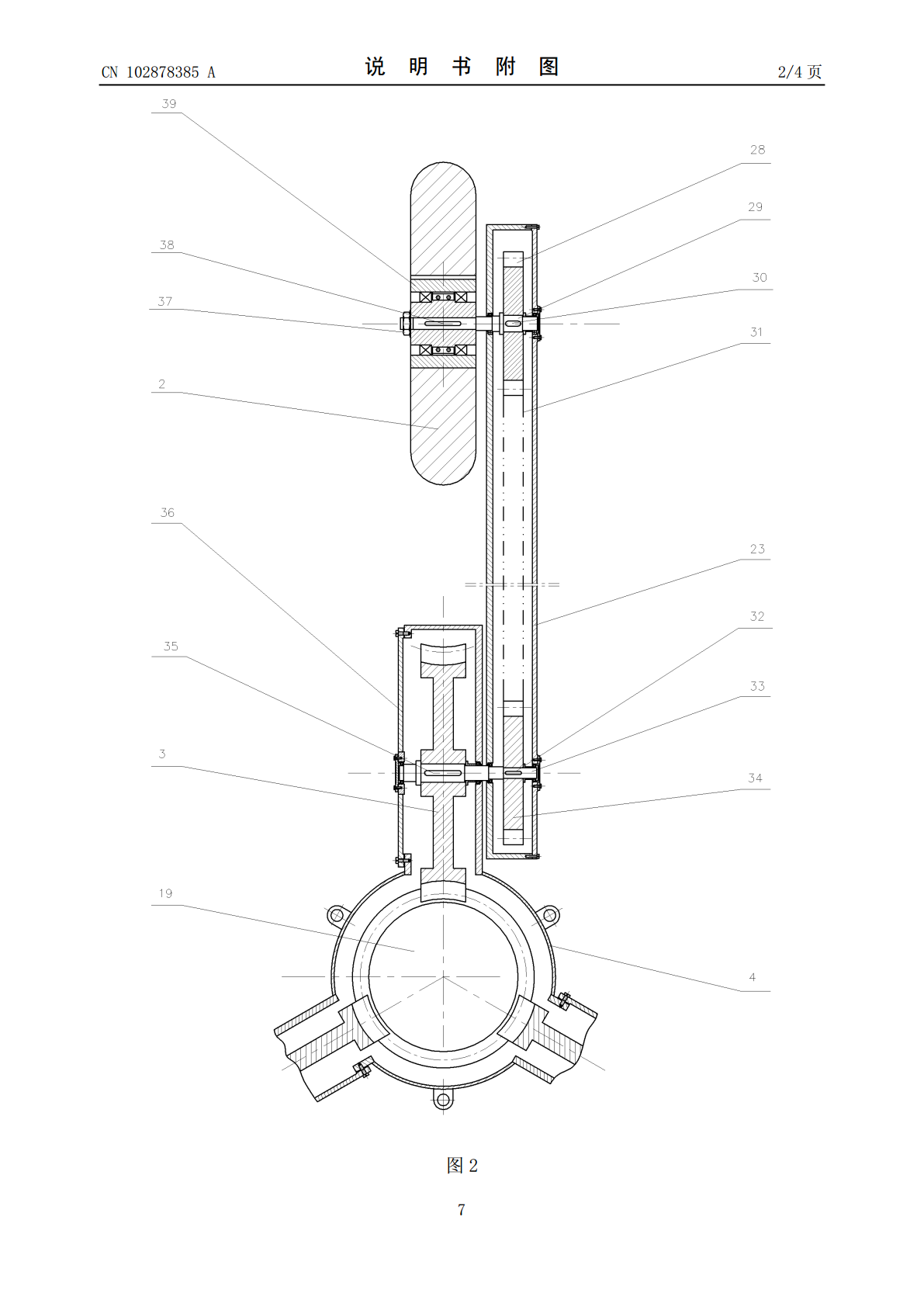
本发明是一种流体驱动的自适应管道爬行器,它包括变径适应机构、驱动行走机构、从动行走机构、伞状挡水翼机构和分流阀结构。其特点是:驱动方式为流体驱动为主,驱动轮驱动为辅,使运动速度均匀。变径机构可以有效的根据管径的变化自行调节适应,并可以通过传导机构改变伞状挡水翼的开度。导流管入口处装有叶轮,流体流过时叶轮旋转,并通过主轴将动力传动到驱动轮上。本设计由流体驱动,无需额外能源避免了拖缆等带来的阻力,可以满足超长距离的在线作业要求,可以适应管径变化较大的场合,流体压差和主动轮双重驱动使装置运动速度平稳,还具有对管
自适应管道爬行器.pdf
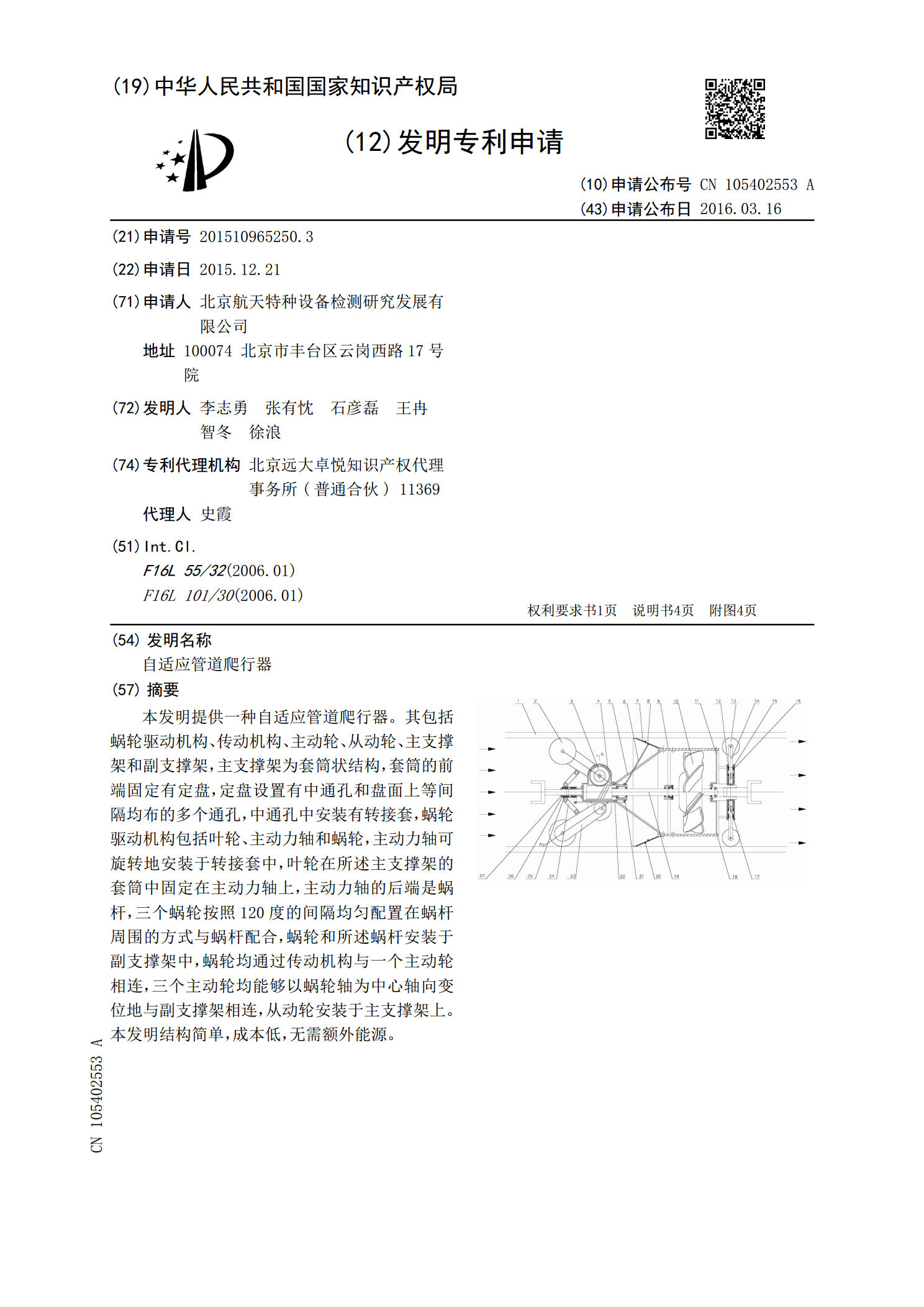
本发明提供一种自适应管道爬行器。其包括蜗轮驱动机构、传动机构、主动轮、从动轮、主支撑架和副支撑架,主支撑架为套筒状结构,套筒的前端固定有定盘,定盘设置有中通孔和盘面上等间隔均布的多个通孔,中通孔中安装有转接套,蜗轮驱动机构包括叶轮、主动力轴和蜗轮,主动力轴可旋转地安装于转接套中,叶轮在所述主支撑架的套筒中固定在主动力轴上,主动力轴的后端是蜗杆,三个蜗轮按照120度的间隔均匀配置在蜗杆周围的方式与蜗杆配合,蜗轮和所述蜗杆安装于副支撑架中,蜗轮均通过传动机构与一个主动轮相连,三个主动轮均能够以蜗轮轴为中心轴向
一种流体驱动自适应管道喷射清洗器.pdf
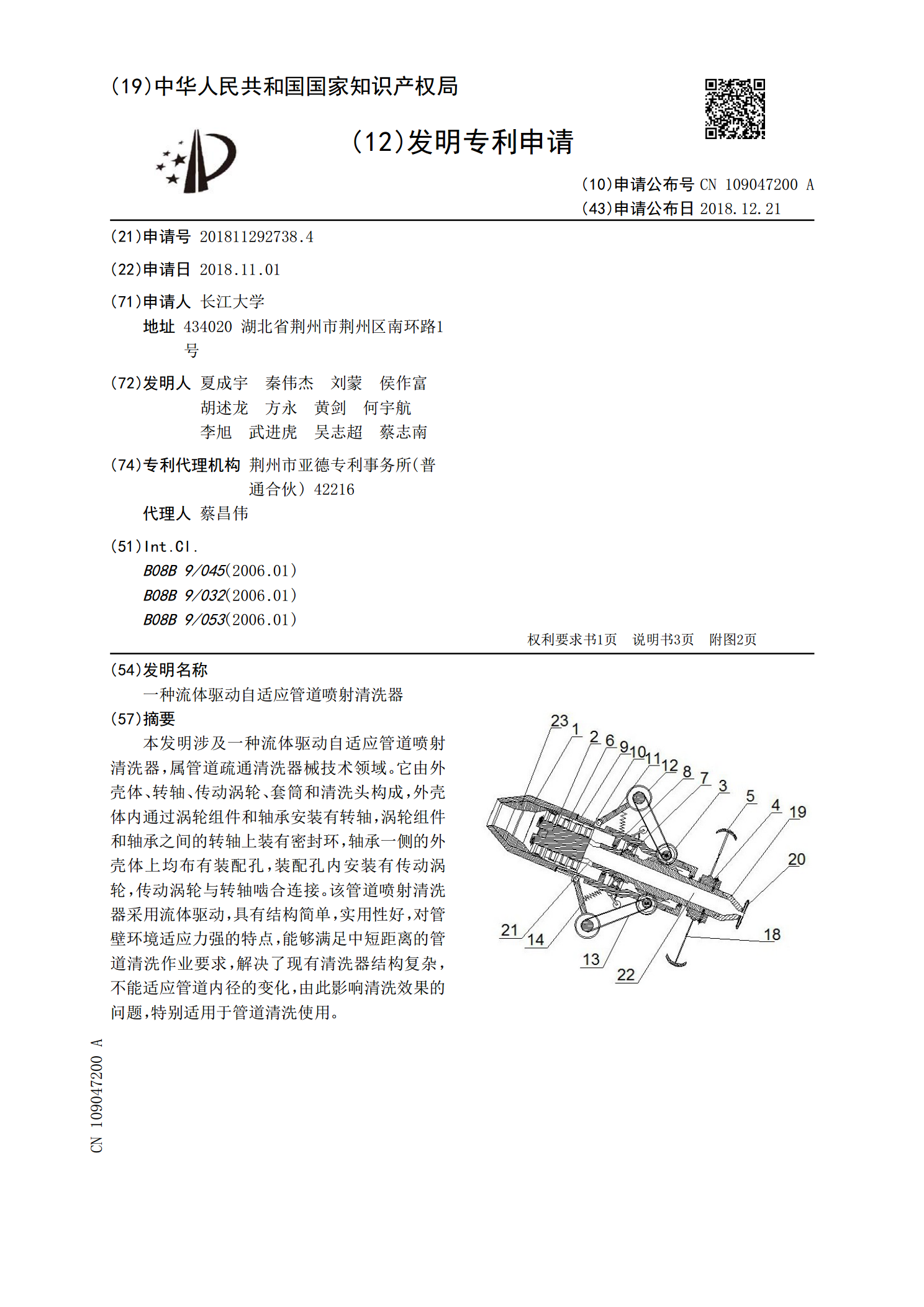
本发明涉及一种流体驱动自适应管道喷射清洗器,属管道疏通清洗器械技术领域。它由外壳体、转轴、传动涡轮、套筒和清洗头构成,外壳体内通过涡轮组件和轴承安装有转轴,涡轮组件和轴承之间的转轴上装有密封环,轴承一侧的外壳体上均布有装配孔,装配孔内安装有传动涡轮,传动涡轮与转轴啮合连接。该管道喷射清洗器采用流体驱动,具有结构简单,实用性好,对管壁环境适应力强的特点,能够满足中短距离的管道清洗作业要求,解决了现有清洗器结构复杂,不能适应管道内径的变化,由此影响清洗效果的问题,特别适用于管道清洗使用。

履带式自适应管道爬行器.pdf
本发明公开了一种履带式自适应管道爬行器,包括夹持单元、爬行单元和控制单元;爬行单元包括两套履带单元,两个从动锥齿轮、两个张紧轮和一个主动锥齿轮,共同与锥形齿履带传动连接,构成一套履带单元;控制单元包括电控盒,电控盒还与所有同步电机控制连接,每个同步电机分别设置有一个扭矩传感器。本发明的履带式自适应管道爬行器,解决了现有技术不能适应水平井和大位移井不同管径的电缆铺设,驱动力不足,不能克服弯曲管道的爬行,内外侧速度不一致,井段附着力差的问题。可应用于石油勘探,城市管道铺设等场合。

一种自适应管道爬行器.pdf
本发明公开了一自适应管道爬行器,包括1个主驱动模块和若干拖行模块,其中主驱动模块包括电机、主支架、蜗轮、蜗杆、阻尼器、轮支架、同步带轮、同步带、行走轮;拖行模块包括支架、阻尼器、轮支架、行走轮;主驱动模块与拖行模块及各拖行模块之间以球头杆与球槽杆组成的球铰链联接。本爬行器具备驱动自锁功能,可以满足管道内径变化、拐弯、管道垂直情况的爬行要求。