
轮式移动机器人的模糊滑模驱动控制方法.pdf

邻家****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

轮式移动机器人的模糊滑模驱动控制方法.pdf
本发明涉及一种轮式移动机器人的模糊滑模驱动控制方法。包括步骤:根据车辆地面力学理论,分析轮式移动机器人刚性车轮与地面的接触特性,建立以车轮滑转率为系统状态变量的轮式移动机器人行驶动力学模型;根据系统特征,确定系统的控制输入和控制输出,建立轮式移动机器人控制模型;建立轮式移动机器人车轮滑转率控制系统。本发明应用在对轮式移动机器人的驱动控制上,可以将轮式移动机器人的车轮滑转率控制在期望值上,这样就能在机器人行驶的过程中控制车轮的滑转程度,从而有效的提高轮式移动机器人的能源利用率。
一种轮式移动机器人的模糊滑模轨迹跟踪控制及方法.pdf
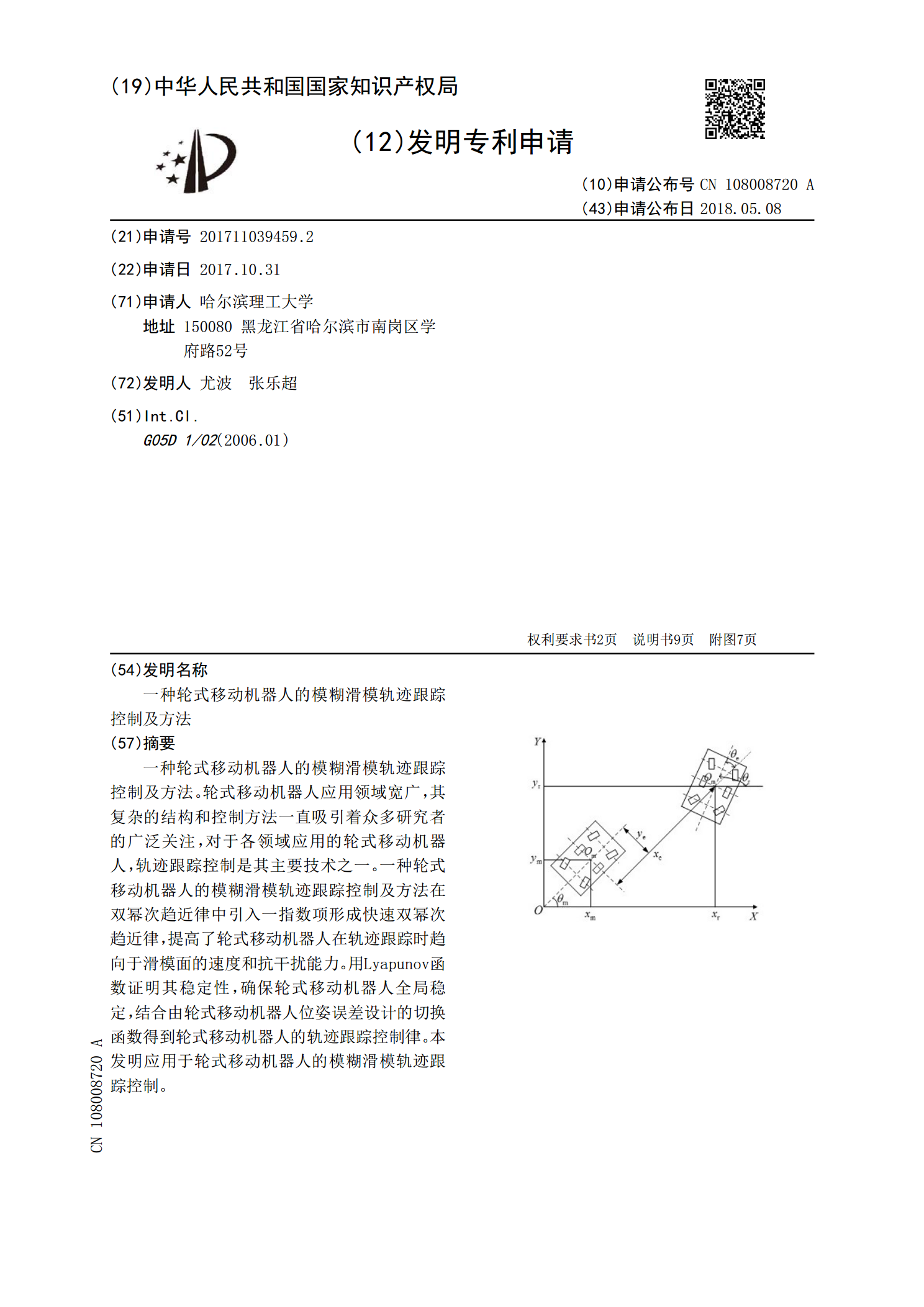
一种轮式移动机器人的模糊滑模轨迹跟踪控制及方法。轮式移动机器人应用领域宽广,其复杂的结构和控制方法一直吸引着众多研究者的广泛关注,对于各领域应用的轮式移动机器人,轨迹跟踪控制是其主要技术之一。一种轮式移动机器人的模糊滑模轨迹跟踪控制及方法在双幂次趋近律中引入一指数项形成快速双幂次趋近律,提高了轮式移动机器人在轨迹跟踪时趋向于滑模面的速度和抗干扰能力。用Lyapunov函数证明其稳定性,确保轮式移动机器人全局稳定,结合由轮式移动机器人位姿误差设计的切换函数得到轮式移动机器人的轨迹跟踪控制律。本发明应用于轮式

基于小波神经网络模糊滑模控制的轮式移动机器人避障研究.docx
基于小波神经网络模糊滑模控制的轮式移动机器人避障研究基于小波神经网络模糊滑模控制的轮式移动机器人避障研究摘要:随着机器人技术的不断发展,轮式移动机器人在各个领域的应用越来越广泛。然而,在复杂的环境中实现轮式移动机器人的自动避障仍然是一个具有挑战性的问题。为了解决这一问题,本文提出了一种基于小波神经网络模糊滑模控制的轮式移动机器人避障方法。通过对机器人感知模块的设计和算法的优化,我们能够实现轮式移动机器人在复杂环境中的自主避障。关键词:轮式移动机器人,避障,小波神经网络,模糊滑模控制1.引言随着科学技术和社

一种反演滑模控制的轮式移动机器人的轨迹跟踪方法.pdf
本发明提供了一种反演滑模控制的轮式移动机器人的轨迹跟踪方法,该轨迹跟踪方法首先对轮式移动机器人进行建模,然后根据其模型建立运动学方程,在得到其目标轨迹方程后,建立其位姿误差方程,同时给出满足有界输入的约束条件,利用该约束条件设计出轮式移动机器人的反演滑模控制器,最后针对设计出来的控制器进行稳定性分析,在对控制器的输入进行有界约束后得到的控制器的控制精度,达到了对轮式移动机器人轨迹精准跟踪的目的。

基于模糊滑模控制算法的欠驱动控制器研究.docx
基于模糊滑模控制算法的欠驱动控制器研究基于模糊滑模控制算法的欠驱动控制器研究摘要欠驱动系统是一类具有非完全控制自由度的机械系统,其控制面临着一些困难。本文提出了一种基于模糊滑模控制算法的欠驱动控制器,以实现欠驱动系统的稳定运动控制。首先,对欠驱动系统进行建模和分析,得到系统的动力学方程。然后,提出了模糊滑模控制算法,并设计了基于此算法的欠驱动控制器。最后,通过仿真实验,验证了所提出控制器的有效性和稳定性。关键词:欠驱动系统、模糊滑模控制、稳定控制、动力学建模1.引言欠驱动系统是一种特殊的机械系统,其自由度