
一种轮式移动机器人的模糊滑模轨迹跟踪控制及方法.pdf

一吃****仕龙


1/10

2/10
3/10
4/10

5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轮式移动机器人的模糊滑模轨迹跟踪控制及方法.pdf
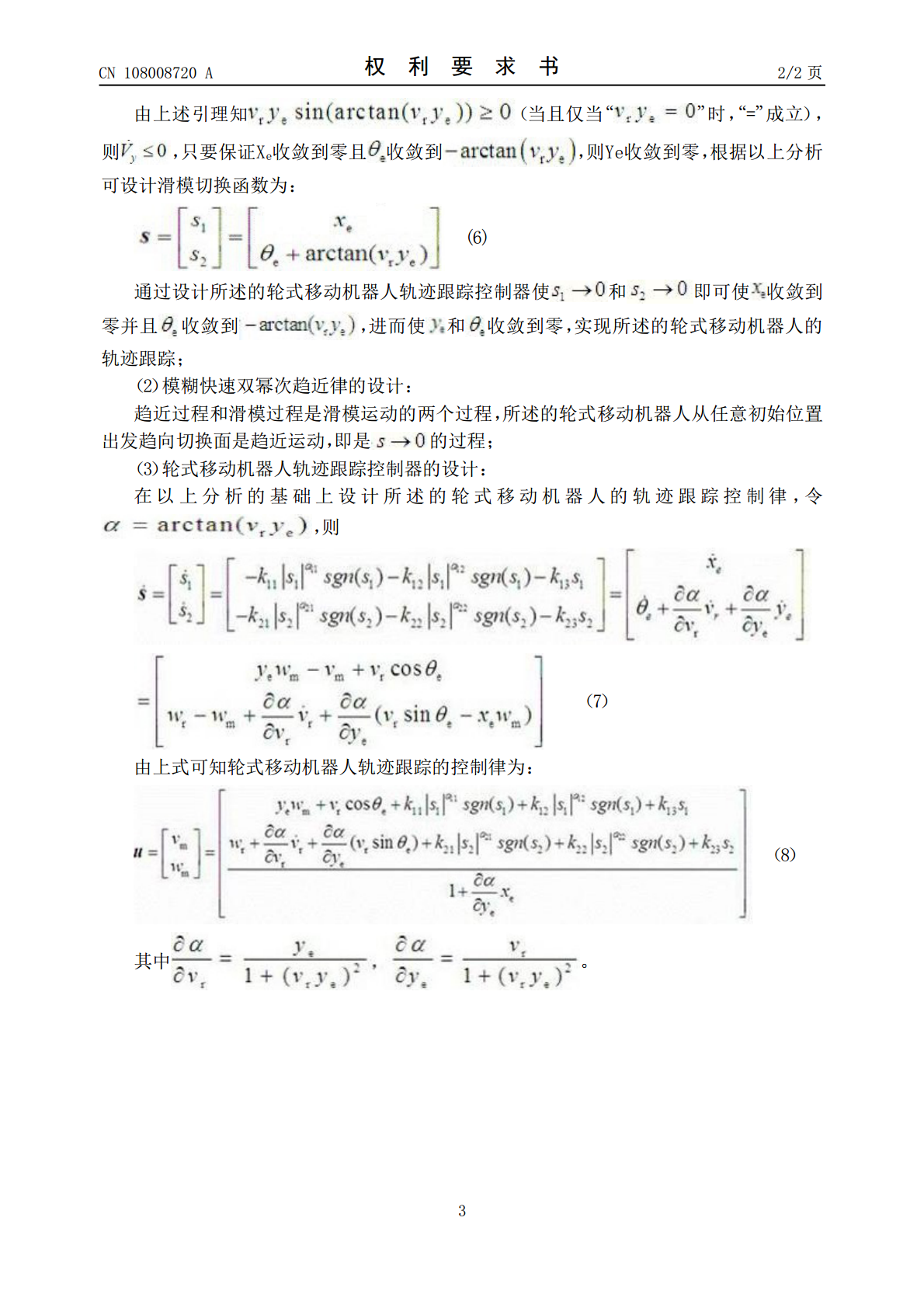
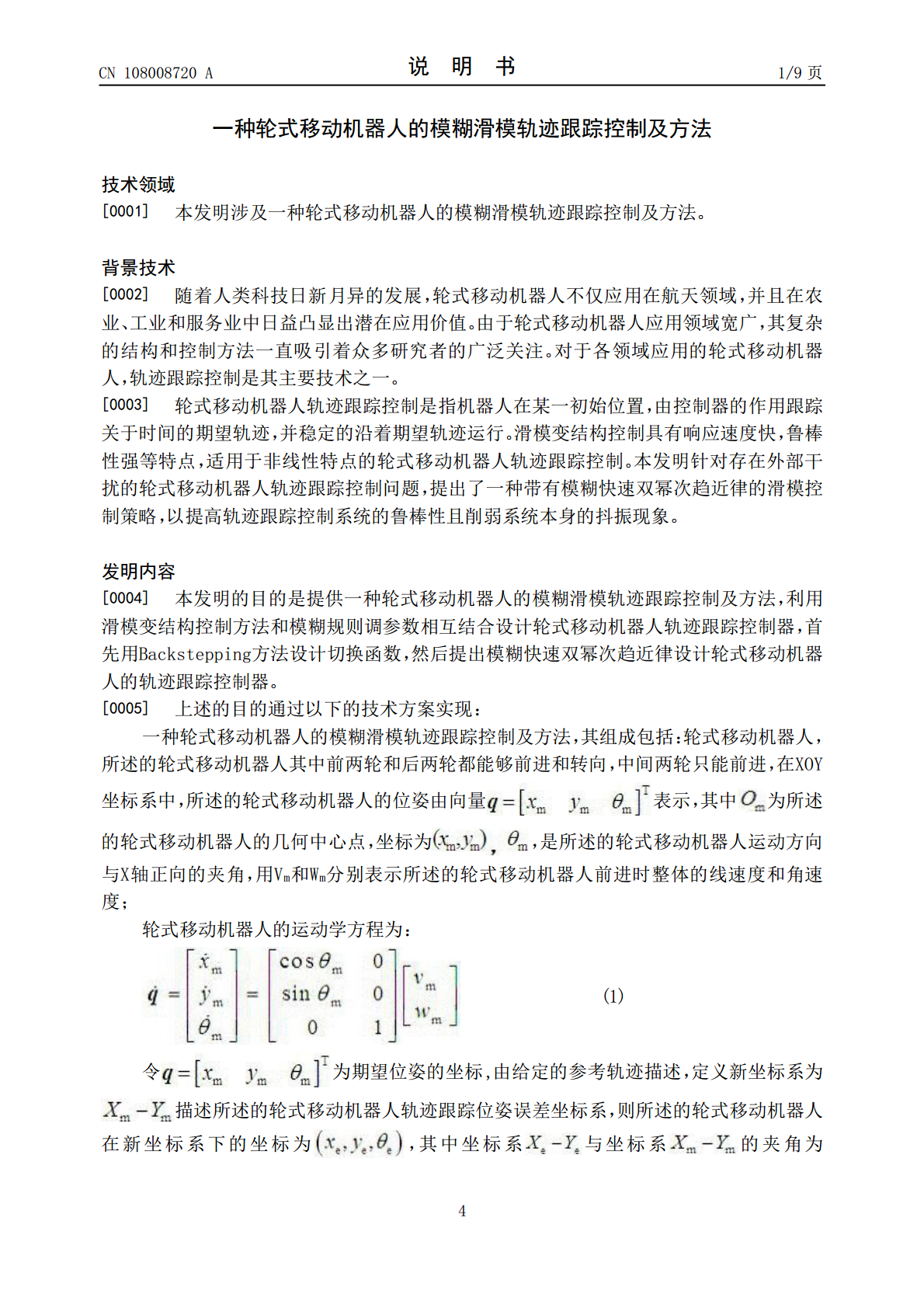
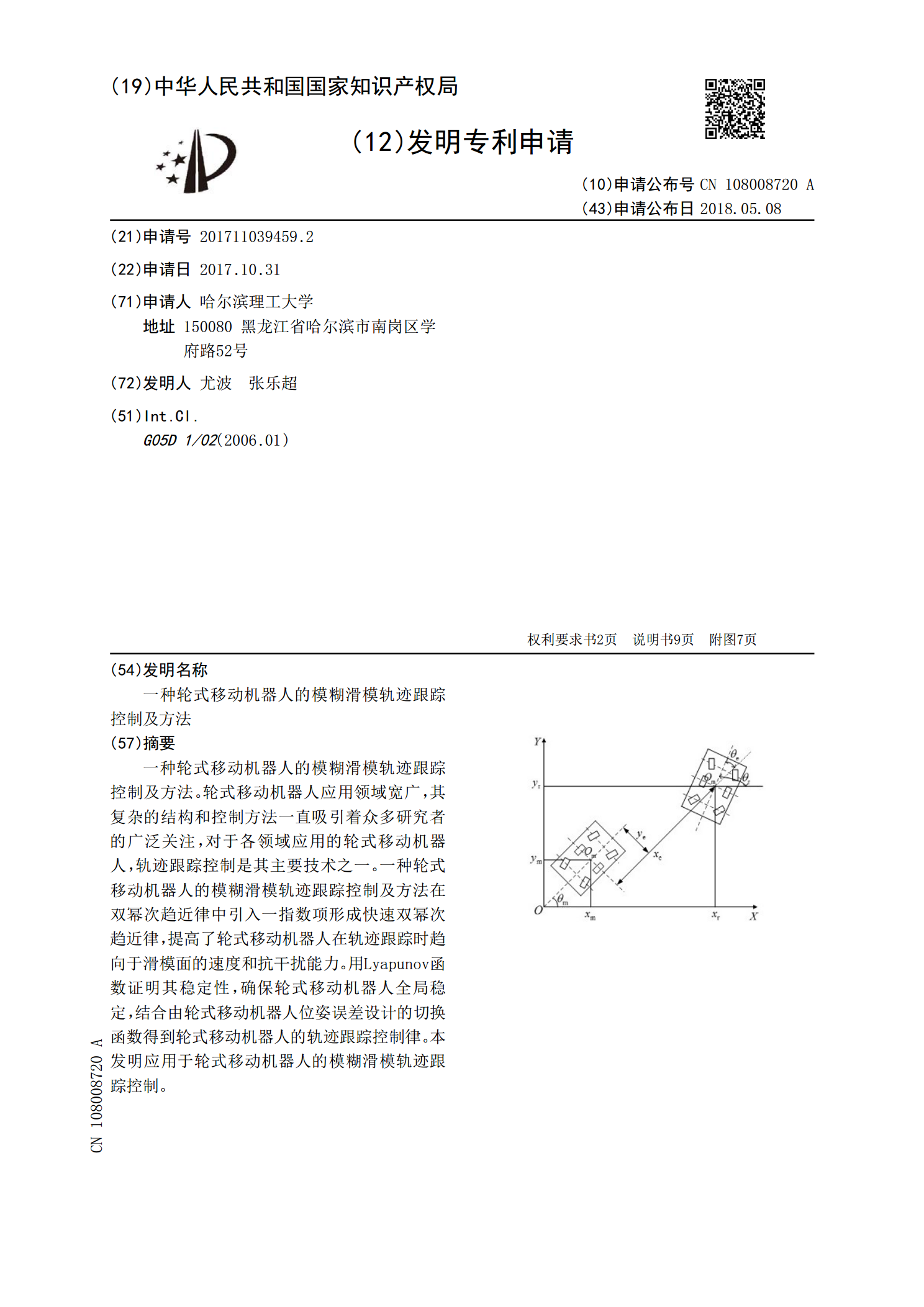
一种轮式移动机器人的模糊滑模轨迹跟踪控制及方法。轮式移动机器人应用领域宽广,其复杂的结构和控制方法一直吸引着众多研究者的广泛关注,对于各领域应用的轮式移动机器人,轨迹跟踪控制是其主要技术之一。一种轮式移动机器人的模糊滑模轨迹跟踪控制及方法在双幂次趋近律中引入一指数项形成快速双幂次趋近律,提高了轮式移动机器人在轨迹跟踪时趋向于滑模面的速度和抗干扰能力。用Lyapunov函数证明其稳定性,确保轮式移动机器人全局稳定,结合由轮式移动机器人位姿误差设计的切换函数得到轮式移动机器人的轨迹跟踪控制律。本发明应用于轮式

一种反演滑模控制的轮式移动机器人的轨迹跟踪方法.pdf
本发明提供了一种反演滑模控制的轮式移动机器人的轨迹跟踪方法,该轨迹跟踪方法首先对轮式移动机器人进行建模,然后根据其模型建立运动学方程,在得到其目标轨迹方程后,建立其位姿误差方程,同时给出满足有界输入的约束条件,利用该约束条件设计出轮式移动机器人的反演滑模控制器,最后针对设计出来的控制器进行稳定性分析,在对控制器的输入进行有界约束后得到的控制器的控制精度,达到了对轮式移动机器人轨迹精准跟踪的目的。

一种轮式移动机器人超螺旋滑模轨迹跟踪方法.pdf
本发明公开一种轮式移动机器人超螺旋滑模轨迹跟踪方法。考虑移动机器人系统受内部参数摄动、外部干扰、运动侧滑和传动机构间隙的影响,对移动机器人系统进行建模。借助双环控制的思想设计位置环虚拟控制器,并在此基础上,借助观测器技术、自适应控制理论和滑模控制方法设计自适应集总扰动观测器、积分反正切滑模面和速度环超螺旋滑模控制器,实现有限时间内对集总扰动的估计、滑模面的到达和对轮式移动机器人预设线速度和角速度的跟踪。最后利用李雅普诺夫稳定性理论证明了移动机器人系统可实现对目标轨迹的渐近跟踪。此种方法解决了轮式移动机器人

基于快速终端滑模的轮式移动机器人轨迹跟踪方法.pdf
本发明公开基于快速终端滑模的轮式移动机器人轨迹跟踪方法。该方法包括四个步骤:(1)建立轮式移动机器人的运动学模型和期望轨迹模型,并根据运动学模型和期望轨迹模型建立误差模型;(2)引入合适的滑模面s

轮式移动机器人的模糊滑模驱动控制方法.pdf
本发明涉及一种轮式移动机器人的模糊滑模驱动控制方法。包括步骤:根据车辆地面力学理论,分析轮式移动机器人刚性车轮与地面的接触特性,建立以车轮滑转率为系统状态变量的轮式移动机器人行驶动力学模型;根据系统特征,确定系统的控制输入和控制输出,建立轮式移动机器人控制模型;建立轮式移动机器人车轮滑转率控制系统。本发明应用在对轮式移动机器人的驱动控制上,可以将轮式移动机器人的车轮滑转率控制在期望值上,这样就能在机器人行驶的过程中控制车轮的滑转程度,从而有效的提高轮式移动机器人的能源利用率。