
一种双轮自平衡车辆控制系统以及双轮自平衡车辆.pdf

东耀****哥哥

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种双轮自平衡车辆控制系统以及双轮自平衡车辆.pdf
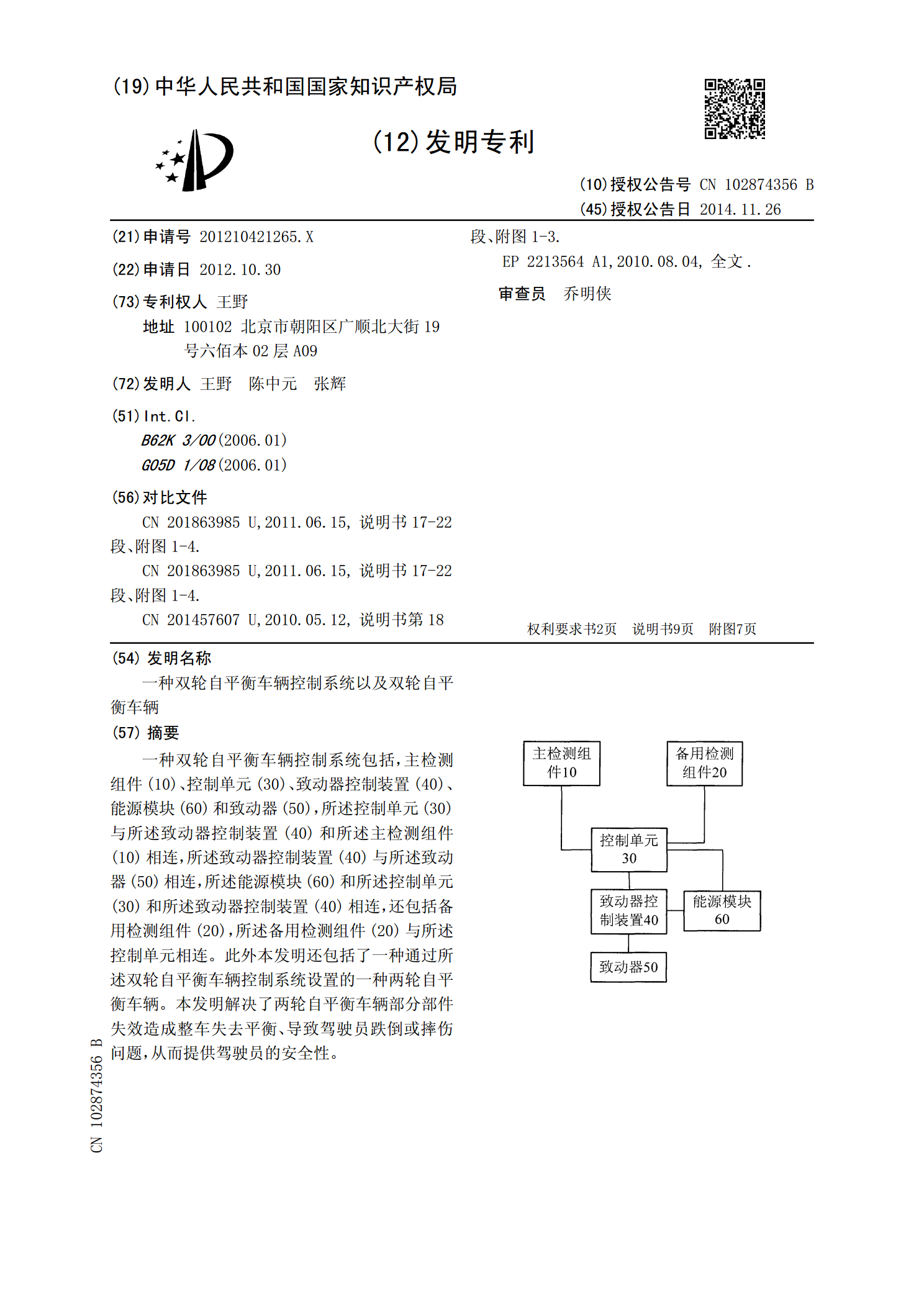
一种双轮自平衡车辆控制系统包括,主检测组件(10)、控制单元(30)、致动器控制装置(40)、能源模块(60)和致动器(50),所述控制单元(30)与所述致动器控制装置(40)和所述主检测组件(10)相连,所述致动器控制装置(40)与所述致动器(50)相连,所述能源模块(60)和所述控制单元(30)和所述致动器控制装置(40)相连,还包括备用检测组件(20),所述备用检测组件(20)与所述控制单元相连。此外本发明还包括了一种通过所述双轮自平衡车辆控制系统设置的一种两轮自平衡车辆。本发明解决了两轮自平衡车辆

双轮自平衡小车.pdf
本发明公开了一种双轮自平衡小车,属于教学实验装置技术领域,其特征在于:包括左轮、右轮,左轮和右轮之间通过车轴相连接,在左轮和右轮上皆安装有驱动电机,平衡块放置于车轴上,在平衡块内置有控制器,控制器包括电源、单片机、倾角传感器,电源分别与单片机、倾角传感器、驱动电机相连,倾角传感器与单片机相连,单片机与驱动电机相连。本发明将控制理论趣味化,具有较好的推广价值。

双轮自平衡小车的控制系统.pdf
本发明公开一种双轮自平衡小车的控制系统,包括微控制器、电池组、电压转化模块、人机交互模块、霍尔测速传感器、电机驱动电路、直流电机、姿态检测模块,所述电池组通过电压转化模块与微控制器相连、所述人机交互模块与微控制器相连,所述姿态检测模块与微控制器相连,所述微控制器还通过电机驱动电路与直流电机相连,所述微控制器还通过霍尔测速传感器与直流电机相连。本发明提供的控制系统,结构简单,可操作性高,能有效实现对小车整体平稳运行。

双轮自平衡小车控制系统的设计.docx
双轮自平衡小车控制系统的设计张婷婷摘要:双轮自平衡小车具有高适应性、高灵活性、小面积、低功耗、长续航等优点,完全符合未来智能技术的前景方向,可推广于承载、运输、代步等众多民用、军用场合,有很大的发展潜力和市场前景,具有十分重要的研究意义。为了实现平衡稳定性能的表现和速度的提升,本文以双轮小车为主要研究对象,通过对控制系统关键技术的研究,实现硬件系统及软件系统的设计,采集各种道路、倾角及速度数据,并利用单片机对有效信息进行融合,从而针对不同的工作环境,对双轮小车的驱动电机分别进行有效的控制,使其实现稳定、适
一种双轮自平衡小车.pdf
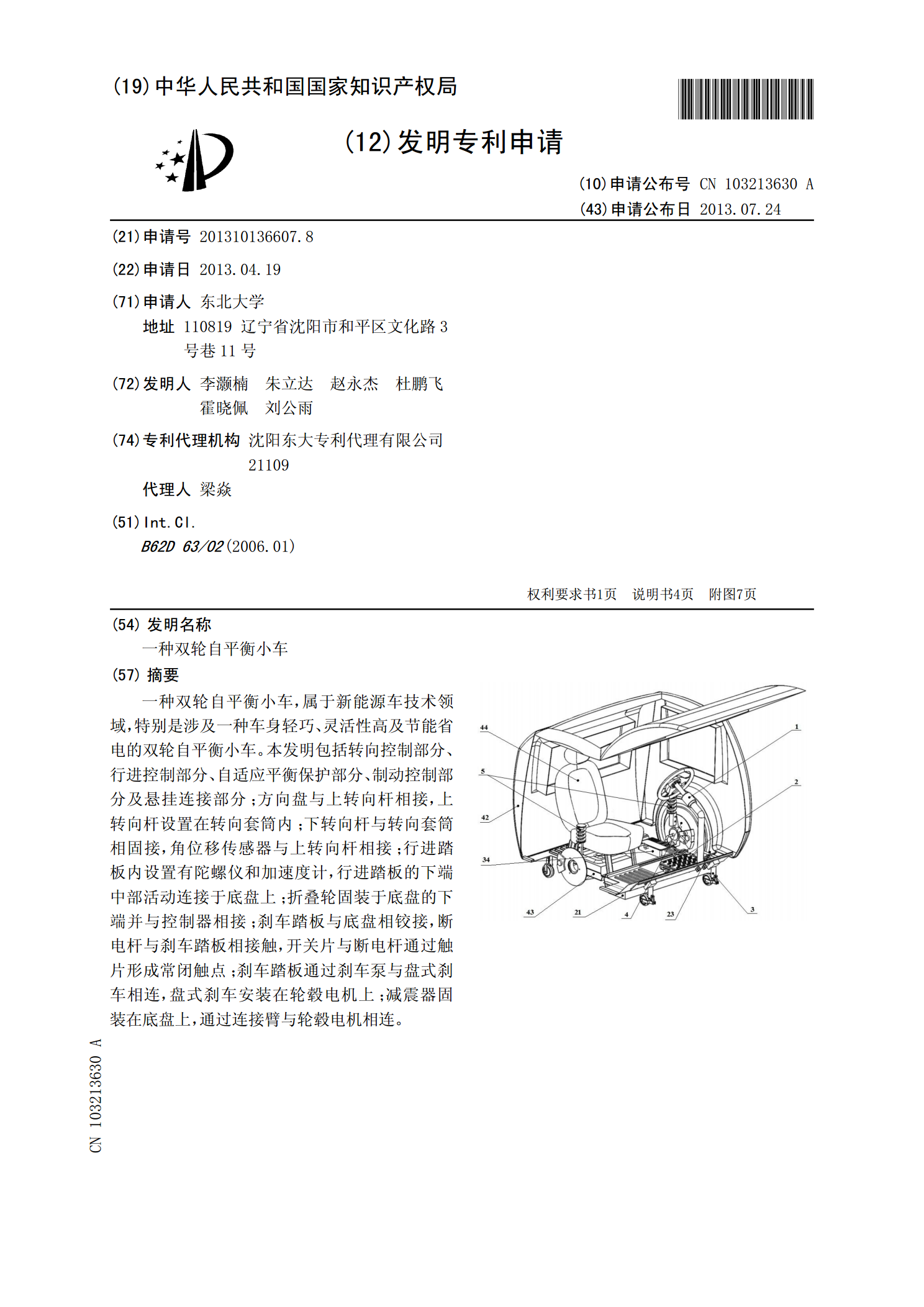
一种双轮自平衡小车,属于新能源车技术领域,特别是涉及一种车身轻巧、灵活性高及节能省电的双轮自平衡小车。本发明包括转向控制部分、行进控制部分、自适应平衡保护部分、制动控制部分及悬挂连接部分;方向盘与上转向杆相接,上转向杆设置在转向套筒内;下转向杆与转向套筒相固接,角位移传感器与上转向杆相接;行进踏板内设置有陀螺仪和加速度计,行进踏板的下端中部活动连接于底盘上;折叠轮固装于底盘的下端并与控制器相接;刹车踏板与底盘相铰接,断电杆与刹车踏板相接触,开关片与断电杆通过触片形成常闭触点;刹车踏板通过刹车泵与盘式刹车相