
高压输电线路除冰机被动式越障机构.pdf

小长****6淑


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

高压输电线路除冰机被动式越障机构.pdf
本发明涉及一种高压输电线路除冰机被动式越障机构,主要包括两部分结构:自锁机构和复位回转机构。越障机构设计巧妙,无需动力源即可进行自主越障,其由转子、定子、定位滚珠、定位滚轮、定位销钉以及转子复位用的弹簧以及实现自锁的连杆凸轮机构。在正常的直线除冰工作过程中,机构进行自锁;在遇到障碍物后,通过障碍物与推杆的碰撞,在碰撞力的作用下,推杆带动连杆机构进而驱动凸轮转动,待碰撞力达到一定值后,将固连转子和定子的定位销钉顶出转子,然后转子克服回复弹簧的回复力绕障碍物转动,顺利越过障碍物后,转子在回复弹簧的作用下恢复到

高压输电线路除冰机主动式越障机构.pdf
本发明涉及一种高压输电线路除冰机主动式越障机构,它由齿轮减速机构、支撑盖、转动圆盘、方位滚轮、方位滚珠和距离传感器组成。所述的齿轮减速机构由带涡轮蜗杆减速器的自锁电机、电机输出盘、齿轮连接盘、减速齿轮和齿轮圈组成,自锁电机可以实现除冰机在正常的直线除冰过程中的自锁,保证除冰机在线上的稳定性;在越障过程中,除冰机整机的前行和越障机构转动圆盘的转动以额定速度比运动,使转动圆盘相对于障碍物转动,保证其顺利通过障碍物;方位滚轮和方位滚珠沿转动圆盘的周向均匀分布于左右支撑盖内,不仅对转动圆盘起到了定位作用,使其圆心

水平式双分裂高压输电线路除冰机夹紧越障装置.pdf
本发明涉及一种水平式双分裂高压输电线路除冰机夹紧越障装置,包括机架、行走轮组和夹紧轮;行走轮组包括前行走轮组和后行走轮组,前行走轮组包括共轴的两个前行走轮,后行走轮组包括共轴的两个后行走轮;前、后行走轮均通过支撑件安装在机架下方;夹紧轮位于对应设置的前行走轮或后行走轮下方,同侧的前后两夹紧轮的轮轴外侧端部分别固连有竖向杆,两竖向杆的上端部通过一横轴固连,同侧横轴、竖向杆及夹紧轮轴连为一体;机架下方前后两侧相应位置均焊接有竖向滑槽,每个滑槽内均设有滑块,滑块与竖向滑槽底部之间装有弹性件;横轴穿过同侧前后两竖

高压输电线路的自动除冰机.pdf
本发明公开了一种高压输电线路的自动除冰机的各部分结构设计以及前行、越障动作执行过程。本发明所设计的高压线路自动除冰机由执行部分、行走越障部分、供电部分以及控制模块四部分组成。其特征在于用于夹持输电线路的由齿轮传递动力,主体采用四杆机构的夹爪;用于无动力源自主越障的越障机构,其由旋转棘轮、左右爪片、连接杆、以及旋转棘轮复位用的弹簧,以及减小摩擦的周向布置滚针组成;用于除冰的旋转刀具以及柔性连接杆。其特点为能够自主跨越高压输电线路上的障碍物,并输电线路上的覆冰,且不会对电线路造成伤害。除此之外具备一定的爬坡能
输电线路越障式除冰装置.pdf
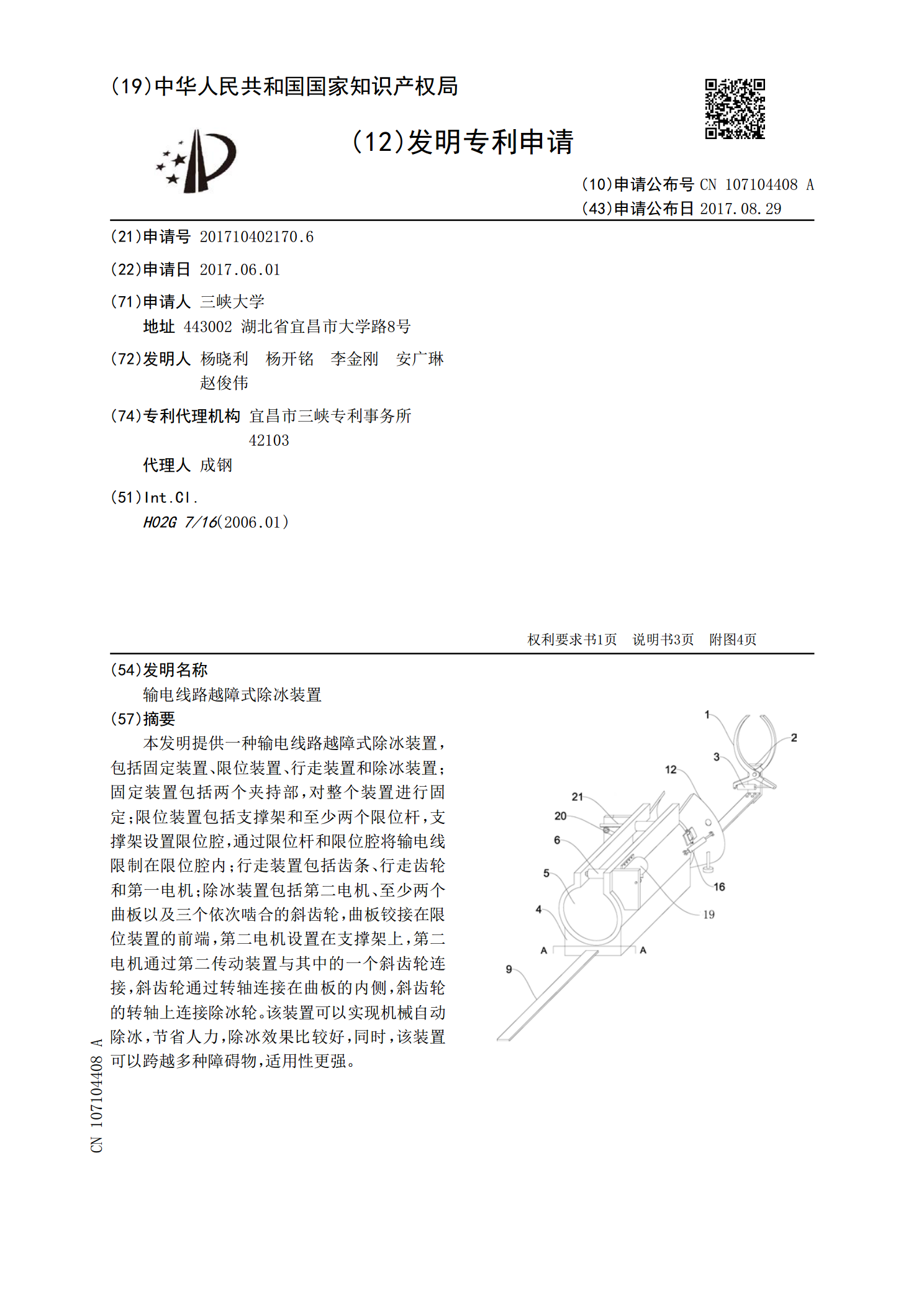
本发明提供一种输电线路越障式除冰装置,包括固定装置、限位装置、行走装置和除冰装置;固定装置包括两个夹持部,对整个装置进行固定;限位装置包括支撑架和至少两个限位杆,支撑架设置限位腔,通过限位杆和限位腔将输电线限制在限位腔内;行走装置包括齿条、行走齿轮和第一电机;除冰装置包括第二电机、至少两个曲板以及三个依次啮合的斜齿轮,曲板铰接在限位装置的前端,第二电机设置在支撑架上,第二电机通过第二传动装置与其中的一个斜齿轮连接,斜齿轮通过转轴连接在曲板的内侧,斜齿轮的转轴上连接除冰轮。该装置可以实现机械自动除冰,节省人