
飞行器自抗扰姿态控制优化与仿真研究.docx

骑着****猪猪


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

飞行器自抗扰姿态控制优化与仿真研究.docx
飞行器自抗扰姿态控制优化与仿真研究随着无人机技术的飞速发展,飞行器的自主控制能力越来越成为人们关注的热点。而在很多实际应用场景下,飞行器需要在外部扰动的干扰下自主维持姿态稳定,这就需要我们研究如何实现自抗扰姿态控制。自抗扰姿态控制是指在飞行器外部扰动的情况下,通过使用控制算法自动调整控制量,以保证飞行器能够维持稳定的姿态。其目的是尽可能地减小外部扰动对飞行器控制系统的影响,以达到控制效果的最优化。在实践中,自抗扰姿态控制是非常复杂的。因为飞行器外部扰动来源繁多,包括风力,气流,气压等,而这些扰动的作用力有

基于自抗扰理论的小型四旋翼飞行器姿态控制.docx
基于自抗扰理论的小型四旋翼飞行器姿态控制基于自抗扰理论的小型四旋翼飞行器姿态控制摘要:四旋翼飞行器由于其良好的机动性和适应性,被广泛应用于无人机领域。然而,由于其非线性、耦合和不确定的动力学特性,四旋翼飞行器的姿态控制一直是一个具有挑战性的问题。本文基于自抗扰理论,提出了一种小型四旋翼飞行器姿态控制方法,通过引入自抗扰控制器来抵消外部干扰和内部不确定性,从而实现稳定的姿态控制。仿真结果表明,所提出的方法具有较好的控制性能,能够有效地实现小型四旋翼飞行器的姿态控制。关键词:小型四旋翼飞行器,姿态控制,自抗扰

电机温度时滞耦合自抗扰优化控制仿真研究.docx
电机温度时滞耦合自抗扰优化控制仿真研究摘要:针对电机温度时滞、耦合和干扰等问题,本文提出了一种自抗扰优化控制方法,并进行了仿真研究。该方法通过自适应控制器对电机系统进行建模和仿真,实现了对电机温度的实时监控和控制。仿真结果表明,该方法能够有效解决电机温度时滞、耦合和干扰等问题,提高了系统的控制精度和稳定性。关键词:电机温度;时滞;耦合;自抗扰优化控制;仿真研究Abstract:Inordertosolvetheproblemsofdelay,couplingandinterferenceofmotorte

载人空间飞行器自抗扰主动隔振优化控制.docx
载人空间飞行器自抗扰主动隔振优化控制引言随着航天技术的进步和人类对深空探索的渴望,载人空间飞行器在近几十年间取得了重大的发展。在长期的太空任务中,载人空间飞行器面临着各种各样的扰动问题,如宇宙射线、温度变化、重力变化等。这些扰动对于飞行器的性能、稳定性和安全性都会产生重要影响。因此,自抗扰控制技术在载人空间飞行器中显得尤为重要。本文将以载人空间飞行器自抗扰主动隔振优化控制为题,介绍该控制方法在载人空间飞行器中的应用与优势。一、载人空间飞行器自抗扰主动隔振优化控制的基本原理自抗扰控制是一种通过检测并抵消外部
飞行器俯仰姿态的线性自抗扰控制器设计与参数整定.pdf
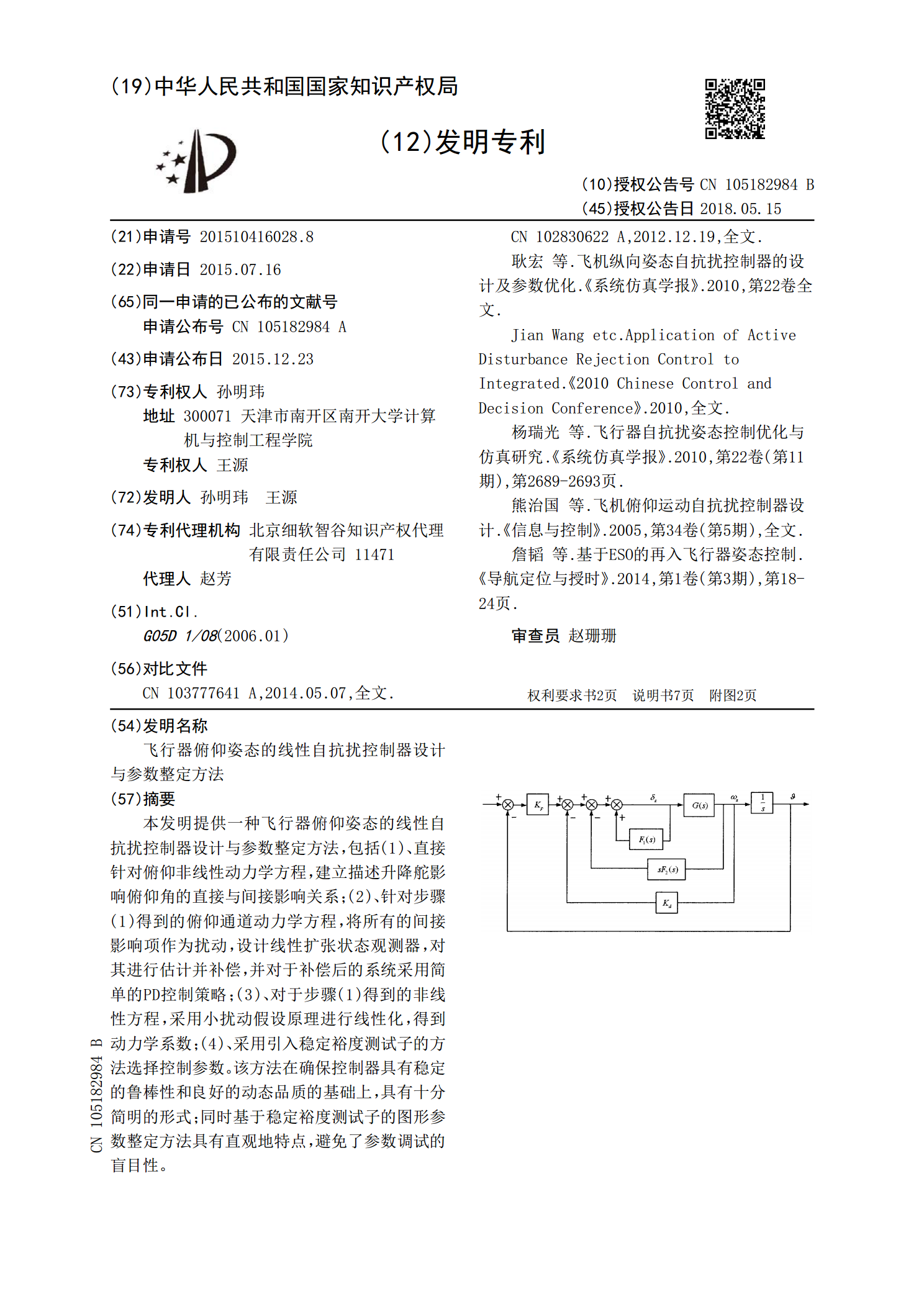
本发明提供一种飞行器俯仰姿态的线性自抗扰控制器设计与参数整定,包括(1)、直接针对俯仰非线性动力学方程,建立描述升降舵影响俯仰角的直接与间接影响关系;(2)、针对步骤(1)得到的俯仰通道动力学方程,将所有的间接影响项作为扰动,设计线性扩张状态观测器,对其进行估计并补偿,并对于补偿后的系统采用简单的PD控制策略;(3)、对于步骤(1)得到的非线性方程,采用小扰动假设原理进行线性化,得到动力学系数;(4)、根据鲁棒稳定性指标和动态性能指标图形化整定控制参数。该方法在确保控制器具有稳定的鲁棒性和良好的动态品质的