
飞行器俯仰姿态的线性自抗扰控制器设计与参数整定.pdf

听容****55

1/10

2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
飞行器俯仰姿态的线性自抗扰控制器设计与参数整定.pdf
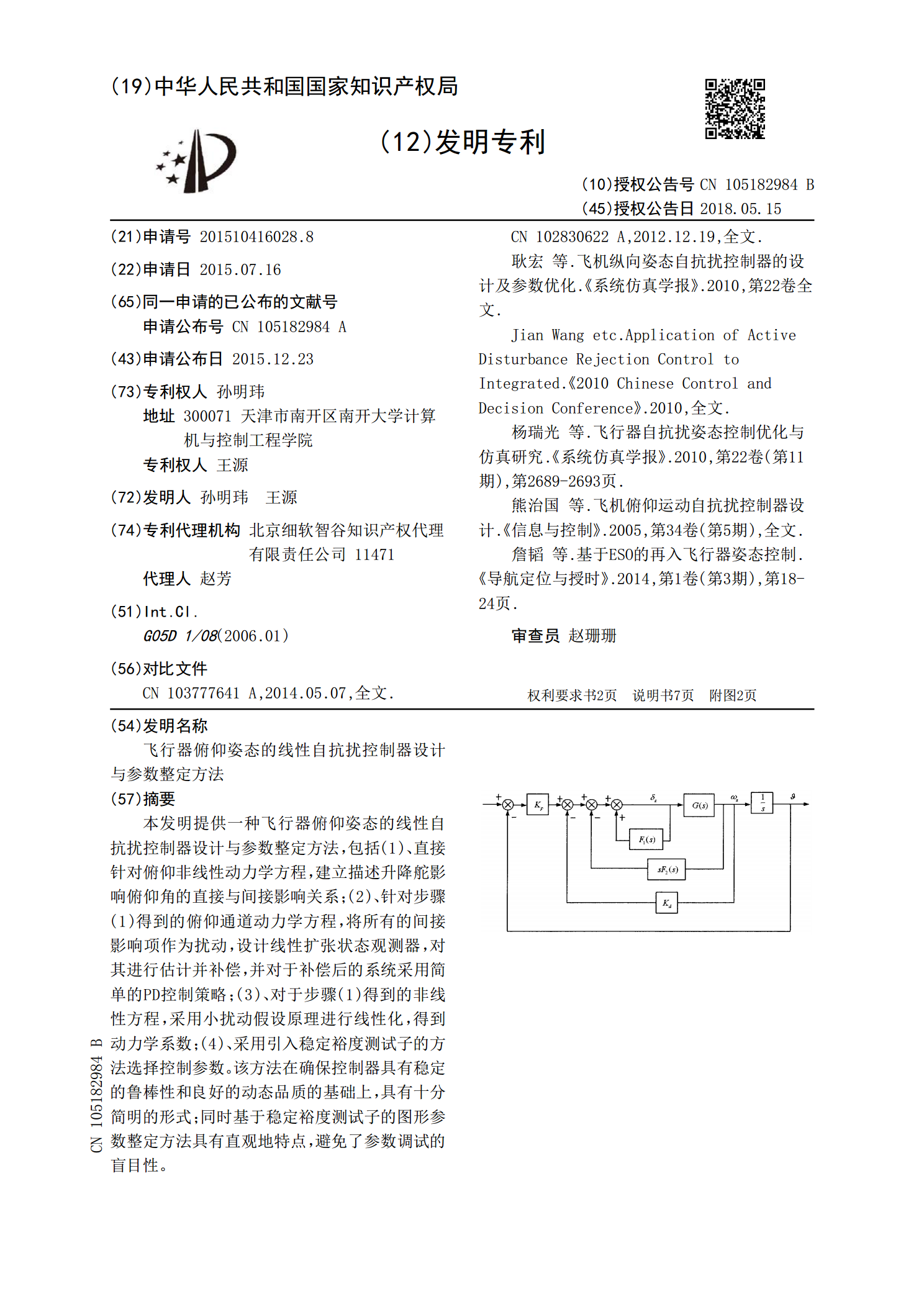
本发明提供一种飞行器俯仰姿态的线性自抗扰控制器设计与参数整定,包括(1)、直接针对俯仰非线性动力学方程,建立描述升降舵影响俯仰角的直接与间接影响关系;(2)、针对步骤(1)得到的俯仰通道动力学方程,将所有的间接影响项作为扰动,设计线性扩张状态观测器,对其进行估计并补偿,并对于补偿后的系统采用简单的PD控制策略;(3)、对于步骤(1)得到的非线性方程,采用小扰动假设原理进行线性化,得到动力学系数;(4)、根据鲁棒稳定性指标和动态性能指标图形化整定控制参数。该方法在确保控制器具有稳定的鲁棒性和良好的动态品质的

自抗扰控制器的参数整定及应用.docx
自抗扰控制器的参数整定及应用标题:自抗扰控制器的参数整定及应用摘要:自抗扰控制器是一种现代控制策略,它通过将扰动作为控制系统的重要组成部分来抵消外界扰动,从而实现系统的稳定性和鲁棒性增强。本文介绍了自抗扰控制器的原理,探讨了参数整定方法,并阐述了其在工业控制领域的应用。通过对自抗扰控制器的参数整定及应用的研究,可以为实际工程提供参考和指导。第一章:引言1.1研究背景1.2研究目的第二章:自抗扰控制器原理2.1自抗扰控制器的基本原理2.2自抗扰控制器的结构2.3自抗扰控制器的数学模型第三章:自抗扰控制器参数

线性自抗扰控制器自整定研究的任务书.docx
线性自抗扰控制器自整定研究的任务书任务书课题名称:线性自抗扰控制器自整定研究一、研究背景和意义在工业自动化和机械控制中,控制器是一个必不可少的组成部分。目前,PID控制器以其简单易用、稳定可靠的特点,已广泛应用于控制领域。但是,PID控制器在应对一些非线性或强扰动系统的控制问题时存在一定的局限性。为了解决这些问题,各种智能控制算法被提出和使用。其中,自适应控制和自整定控制器在控制器设计中得到了广泛应用。自整定控制器是一种能够自动调节控制器参数的控制算法。它通过在线辨识系统的动态特性,并不断调整控制器参数,

降阶自抗扰控制器参数整定的开题报告.docx
降阶自抗扰控制器参数整定的开题报告一、课题背景随着工业自动化水平的不断提高,控制系统的复杂性也在不断增加。在控制系统中,控制器的作用是根据反馈信号对系统进行控制,使系统的输出结果满足设定要求。控制器的参数调整对控制系统性能和稳定性有着重要影响,传统的控制器参数调整方法多采用试错法、专家经验等方式进行调整。但是这些方法实现起来较为繁琐,且对控制器参数调整效果的保障程度较低。而降阶自抗扰控制器作为新兴控制器之一,它具有较好的控制性能和适用范围,因此成为了目前控制器设计的研究热点之一。在降阶自抗扰控制器的研究中

基于频域近似的线性系统自抗扰参数整定.docx
基于频域近似的线性系统自抗扰参数整定基于频域近似的线性系统自抗扰参数整定引言:随着科技的不断发展,线性系统控制在工业自动化领域得到了广泛的应用。线性系统可以通过控制器对其进行稳定化、跟踪和抑制干扰。然而,实际系统往往存在不确定性和未建模的干扰,这对系统的性能和稳定性产生了巨大的影响。因此,针对线性系统自抗扰参数整定的研究显得非常重要。一、线性系统的自抗扰参数整定的重要性线性系统的自抗扰参数整定是指通过优化设计控制器的参数,使得系统对外界干扰具有一定的自抗扰能力。自抗扰参数整定可以提高系统的稳定性、鲁棒性和