
一种多功能玻璃清洁机器人及控制方法.pdf

甲申****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种多功能玻璃清洁机器人及控制方法.pdf
本发明公开了一种多功能玻璃清洁机器人及控制方法,包括箱体、吸附系统、行走转向系统、供水系统、清洗系统及自动控制系统,且吸附系统及供水系统装设于箱体内,行走转向系统及清洗系统装设于箱体的下部。吸附系统包括三相电机、气压腔、涵道及扇叶;行走转向系统包括四套轮式结构,每一轮式结构均包括直流电机、减速器、车轮及固定板;供水系统包括曲柄凸轮机构及依序连接的导气管、水箱及供水导管;清洗系统包括清洗电机、锥齿轮、玻璃刷、玻璃刮及玻璃布;自动控制系统包括中央控制器、红外线遥感器及报警装置。本发明结构简单,携带方便,成本低

一种多功能玻璃清洁机器人.pdf
本发明公开了一种多功能玻璃清洁机器人,多功能玻璃清洁机器人通过负压风机吸附在玻璃幕墙上,通过污渍识别装置对污渍的识别,识别到污渍后,清洁旋转盘转动,水泵将清水水箱中的清洗剂输送至喷头,喷头将清洗剂喷出,从而对玻璃幕墙清洁。渍识别系统识别到污渍消失时,水泵从清水水箱中抽取清水输送到喷头,喷头将清水喷到玻璃幕墙上对玻璃幕墙进行清洗,然后开启烘干装置对遗留的水迹进行快速烘干,从而完成清洁工作。解决了人工清洁玻璃幕墙所存在的安全和成本问题,还能够及时维持玻璃幕墙的清洁。
多功能清洁机器人系统及其控制方法.pdf
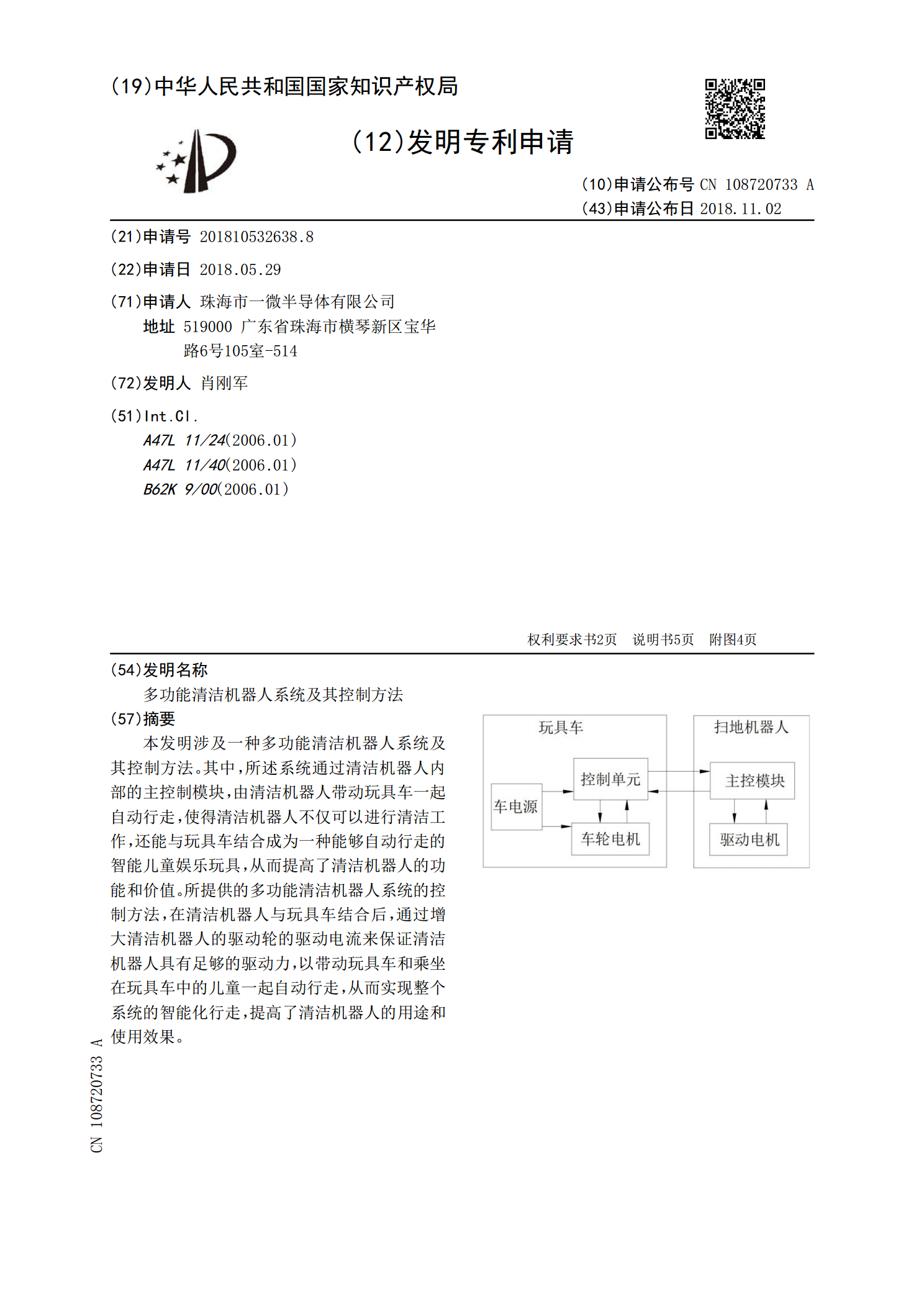
本发明涉及一种多功能清洁机器人系统及其控制方法。其中,所述系统通过清洁机器人内部的主控制模块,由清洁机器人带动玩具车一起自动行走,使得清洁机器人不仅可以进行清洁工作,还能与玩具车结合成为一种能够自动行走的智能儿童娱乐玩具,从而提高了清洁机器人的功能和价值。所提供的多功能清洁机器人系统的控制方法,在清洁机器人与玩具车结合后,通过增大清洁机器人的驱动轮的驱动电流来保证清洁机器人具有足够的驱动力,以带动玩具车和乘坐在玩具车中的儿童一起自动行走,从而实现整个系统的智能化行走,提高了清洁机器人的用途和使用效果。

一种玻璃清洁机器人.pdf
本发明提供了一种玻璃清洁机器人,涉及机器人技术领域,其包括箱体,箱体的两侧设置有行走机构和清洁机械臂,清洁机械臂的端部转动连接有清洁盘,箱体的底部设置有浮动清洗滚刷,浮动清洗滚刷的前端和后端分别设置有刮条;行走机构包括行走电机和并排设置的主动齿轮和从动齿轮,行走电机驱动主动齿轮转动,主动齿轮带动从动齿轮转动,主动齿轮和从动齿轮外啮合有环形齿形履带,齿形履带上间隔设置有多个吸盘,每个吸盘均与同步转动的配气盘连通。解决了现有技术中的玻璃清洁机器人容易从玻璃墙上掉落以及清洁效果不佳的问题。

一种多功能清洁机器人.pdf
本发明公开了一种多功能清洁机器人,包括机器人主体,图像采集装置和用于采集周围景象的图像传感器,图像传感器底部安装有联结杆,联结杆底部安装有总控制系统,图像采集装置与总控制系统通过联结杆固定连接,在机器人主体的左右两侧设置有左机械臂和右机械臂,左机械臂的顶端安装有大臂和第一腕摆带轮,左机械臂和大臂通过第一腕摆带轮固定连接,且右机械臂向下倾斜设置,机器人主体的底部安装有运动底盘,运动底盘的一侧安装有垃圾收纳盒和灰尘收纳盒,该种多功能清洁机器人,通过总控制系统控制联结杆转动进而带动图像传感器的转动,达到采集周围