
一种玻璃清洁机器人.pdf

骊英****bb


1/9
2/9

3/9
4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种玻璃清洁机器人.pdf
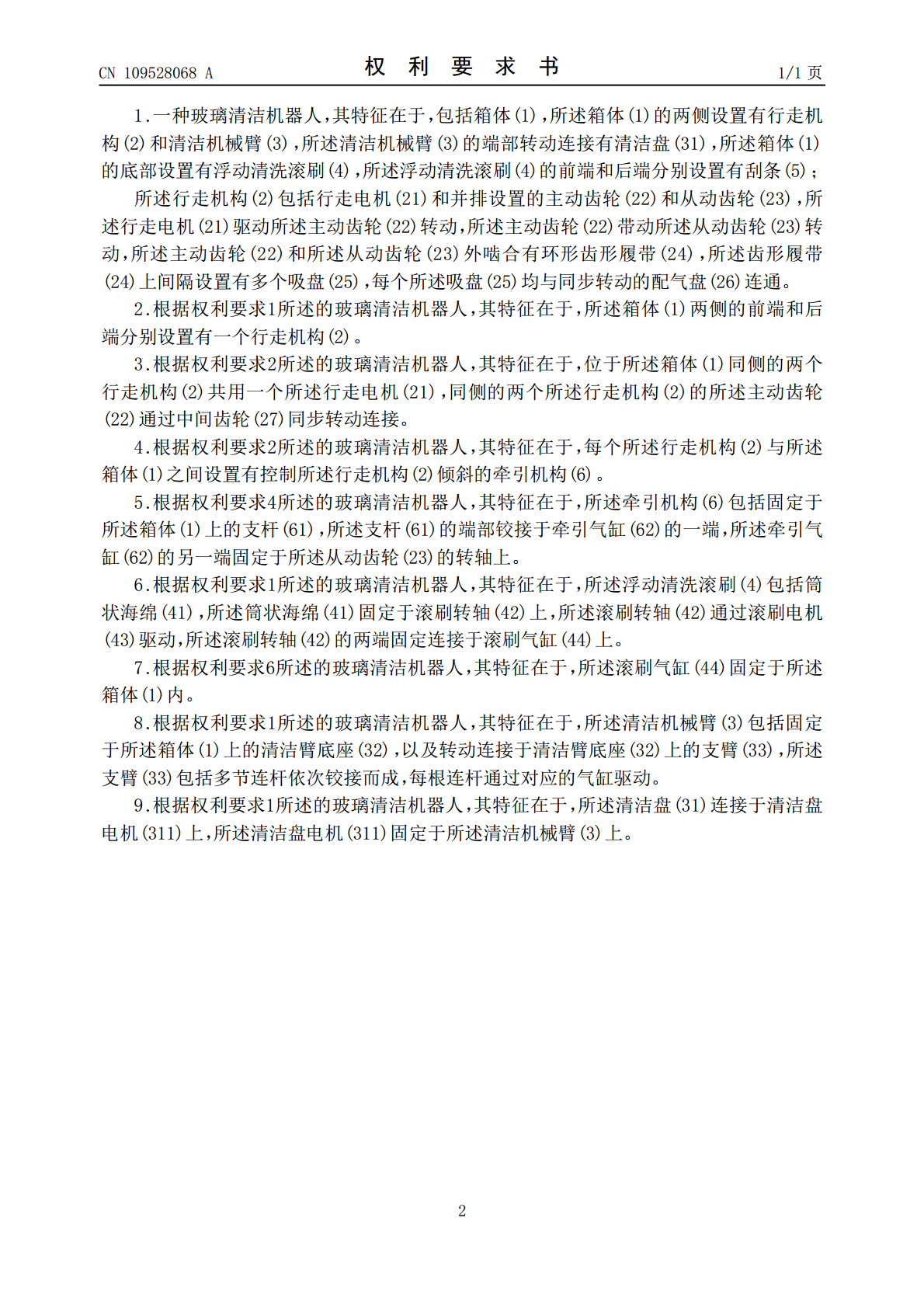
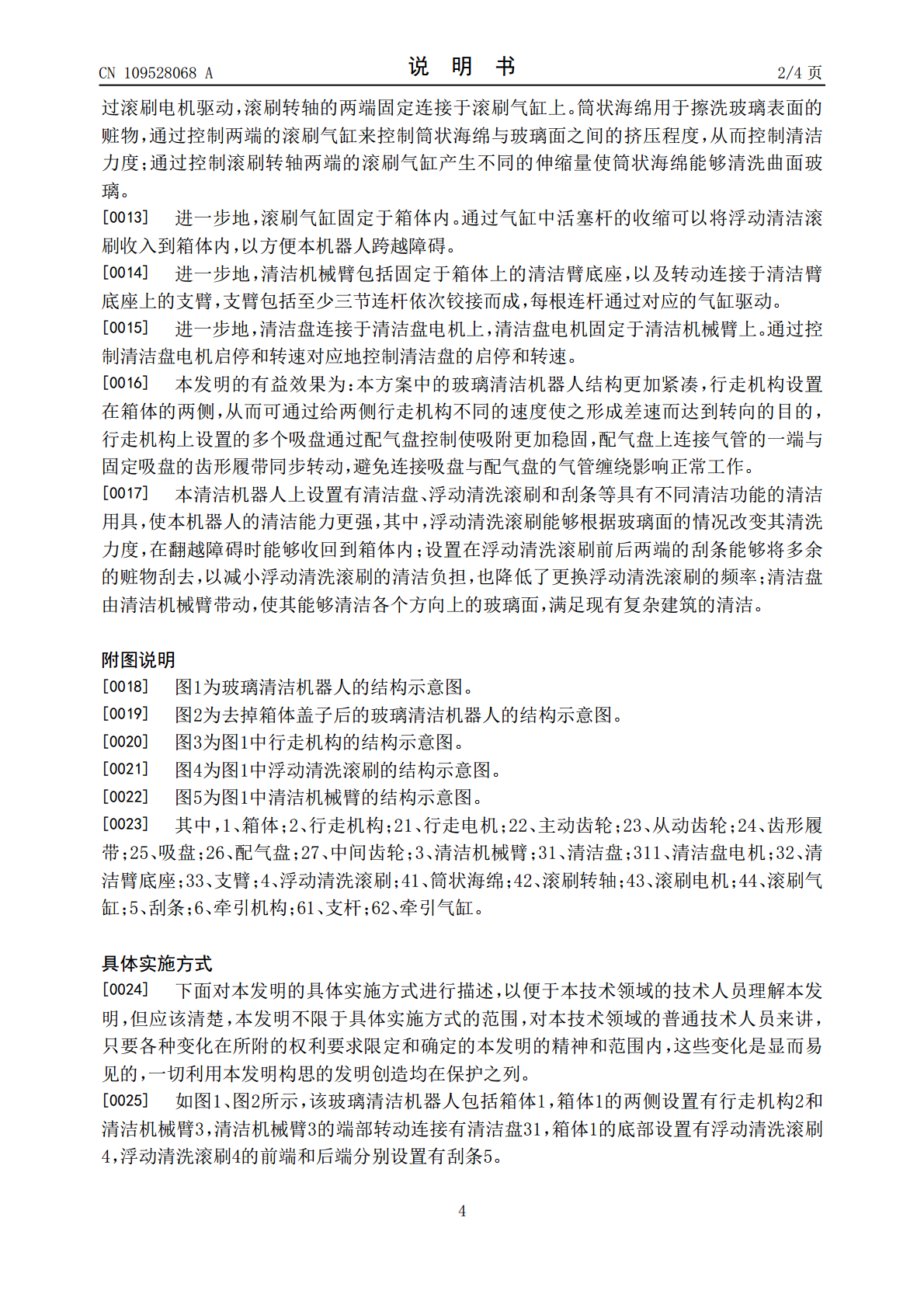
本发明提供了一种玻璃清洁机器人,涉及机器人技术领域,其包括箱体,箱体的两侧设置有行走机构和清洁机械臂,清洁机械臂的端部转动连接有清洁盘,箱体的底部设置有浮动清洗滚刷,浮动清洗滚刷的前端和后端分别设置有刮条;行走机构包括行走电机和并排设置的主动齿轮和从动齿轮,行走电机驱动主动齿轮转动,主动齿轮带动从动齿轮转动,主动齿轮和从动齿轮外啮合有环形齿形履带,齿形履带上间隔设置有多个吸盘,每个吸盘均与同步转动的配气盘连通。解决了现有技术中的玻璃清洁机器人容易从玻璃墙上掉落以及清洁效果不佳的问题。
一种玻璃外墙清洁机器人.pdf
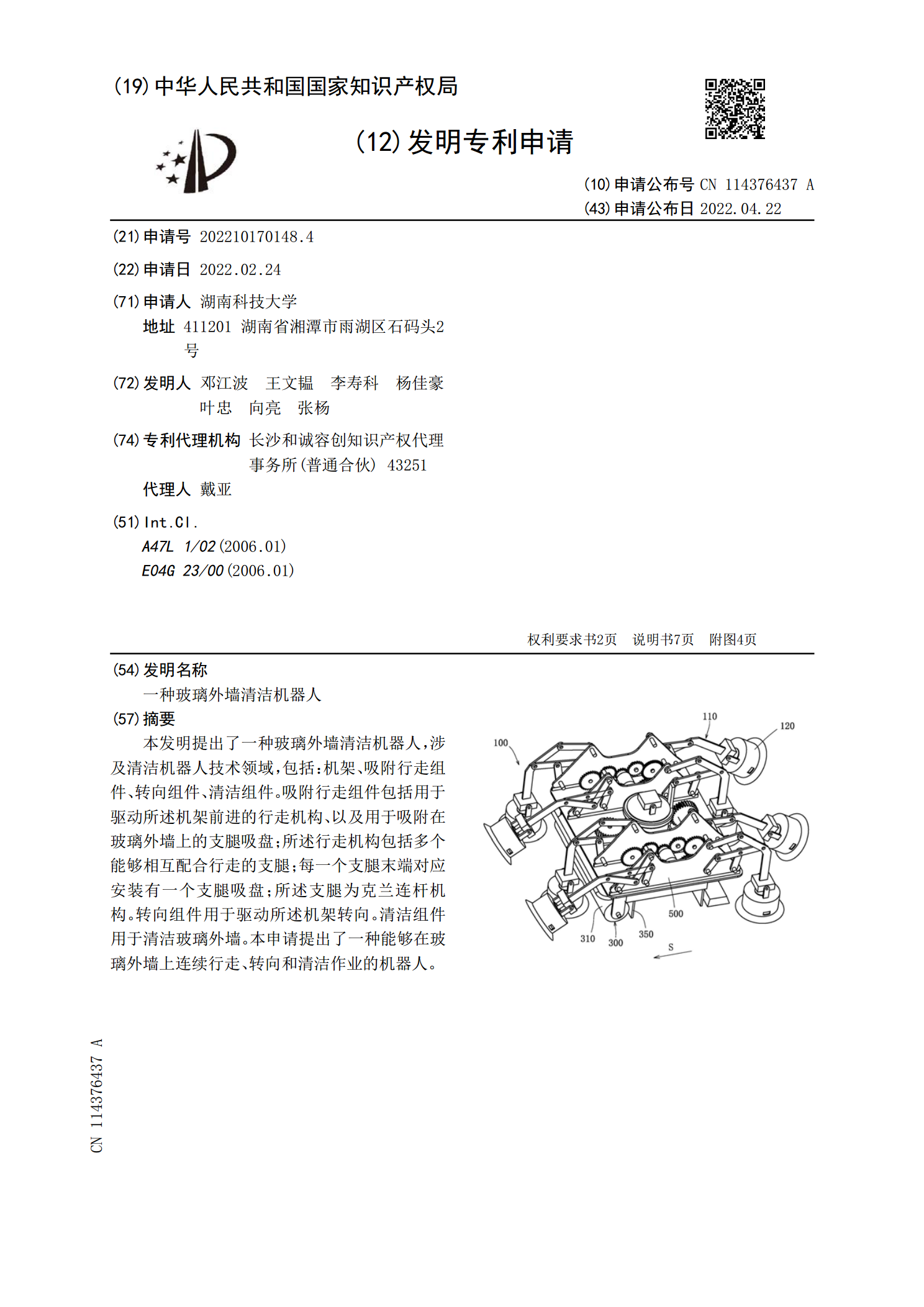
本发明提出了一种玻璃外墙清洁机器人,涉及清洁机器人技术领域,包括:机架、吸附行走组件、转向组件、清洁组件。吸附行走组件包括用于驱动所述机架前进的行走机构、以及用于吸附在玻璃外墙上的支腿吸盘;所述行走机构包括多个能够相互配合行走的支腿;每一个支腿末端对应安装有一个支腿吸盘;所述支腿为克兰连杆机构。转向组件用于驱动所述机架转向。清洁组件用于清洁玻璃外墙。本申请提出了一种能够在玻璃外墙上连续行走、转向和清洁作业的机器人。

一种清洁玻璃用机器人.pdf
本发明公开了一种清洁玻璃用机器人,包括机体,所述机体的内腔焊接有装置箱,所述装置箱内腔背面的左侧通过固定件固定连接有第一电机,所述第一电机的输出轴固定连接有主动齿轮,所述主动齿轮的表面通过链条传动连接有从动齿轮,所述从动齿轮的背面焊接有转杆。本发明通过设置第一电机、主动齿轮、链条、从动齿轮、转杆、固定轴、环形槽板和滑槽的配合,达到了毛刷左右往复移动的效果,通过设置电动升缩杆、第二电机、毛刷、水箱、出水管、水泵、软水管和喷头的配合,达到了对玻璃进行清洁的效果,从而实现了对玻璃清洁效率高的优点,给清洗玻璃的工

一种玻璃门窗清洁机器人.pdf
一种玻璃门窗清洁机器人,解决现有技术存在的工作效率低、可靠性差、真空气泵功率大、内置电池工作时间短等缺点,技术方案是:一种玻璃门窗清洁机器人,包括:自动控制部分、动力电机、真空风机、真空吸盘、旋转清洁盘和机架。动力电机固定在机架上,动力电机经动力齿轮分别与两个旋转清洁盘上的齿轮啮合。旋转清洁盘经轴承套装在所述的真空吸盘上,旋转清洁盘的端面上浮动连接有环形清洁擦。真空吸盘一端设置有真空腔,真空吸盘经端面轴承与机架构成可相对转到的活动连接,真空吸盘中心设在有通孔。真空风机固定在机架上,真空风机进风口经电磁换向

一种可遥控玻璃清洁机器人.pdf
本发明涉及一种可遥控玻璃清洁机器人,由本体及安装在本体上的吸附系统、控制系统、移动系统、清洁系统及警示系统组成,吸附系统包括安装在本体底部的风机及安装在本体底部四周防止漏气的裙边,移动系统为安装在本体两侧的滚轮,经控制系统控制运动轨迹,清洁系统包括设置在本体上部的水箱及经软管与水箱连接的清洁头,警示系统包括检测电池容量的检测电路及指示灯。与现有技术相比,本发明面向家用的玻璃清洁,具有小巧灵活、方便有效等优点。