
空间四自由度串并混联下肢康复机器人设计与分析.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

空间四自由度串并混联下肢康复机器人设计与分析.docx
空间四自由度串并混联下肢康复机器人设计与分析标题:空间四自由度串并混联下肢康复机器人设计与分析摘要:下肢康复机器人在康复治疗中发挥着重要作用。为了满足不同康复需求,本文提出了一种采用空间四自由度串并混联结构的下肢康复机器人设计方案,并对该方案进行分析。通过对机器人的结构设计和运动学分析,可以实现对患者下肢的主动运动和力矩控制,进而提高康复效果。实验结果表明,该机器人具有良好的运动特性和控制性能,能够为下肢康复提供有效的支持和协助。关键词:下肢康复机器人,空间四自由度,串并混联,结构设计,运动学分析1.引言
一种五自由度混联下肢康复机器人.pdf
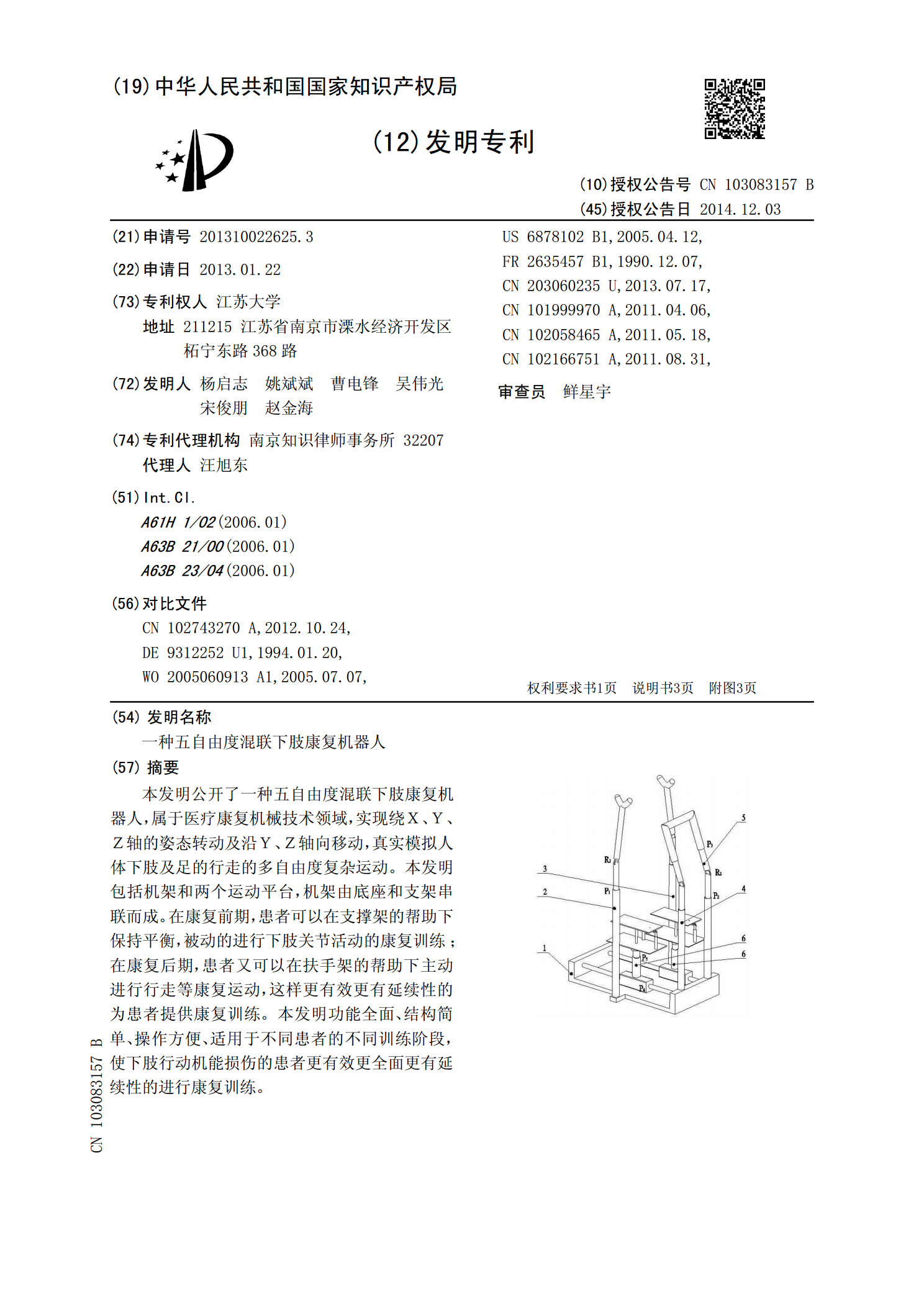
本发明公开了一种五自由度混联下肢康复机器人,属于医疗康复机械技术领域,实现绕X、Y、Z轴的姿态转动及沿Y、Z轴向移动,真实模拟人体下肢及足的行走的多自由度复杂运动。本发明包括机架和两个运动平台,机架由底座和支架串联而成。在康复前期,患者可以在支撑架的帮助下保持平衡,被动的进行下肢关节活动的康复训练;在康复后期,患者又可以在扶手架的帮助下主动进行行走等康复运动,这样更有效更有延续性的为患者提供康复训练。本发明功能全面、结构简单、操作方便、适用于不同患者的不同训练阶段,使下肢行动机能损伤的患者更有效更全面更有

3DOF串并混联上肢康复机器人的运动学及工作空间分析.docx
3DOF串并混联上肢康复机器人的运动学及工作空间分析Title:KinematicsandWorkspaceAnalysisofa3DOFSerial-ParallelHybridUpperLimbRehabilitationRobotAbstract:Thispaperpresentsacomprehensivestudyonthekinematicsandworkspaceanalysisofa3DOFserial-parallelhybridupperlimbrehabilitationrobot.

一种延续性强的五自由度混联下肢康复机器人.pdf
本发明涉及一种延续性强的五自由度混联下肢康复机器人,包括左足、右足、左减震弹簧、右减震弹簧、左支架、右支架、左侧舵机齿、右侧舵机齿、橡胶垫、右L支架、左L支架、左肩舵机齿、右肩舵机齿、靠枕、横板、控制箱、显示屏、扶手、摇杆、摇轮、电池箱、操作器,所述左足上端与左支架的下端固定连接,所述左支架内部嵌入有左减震弹簧,所述左支架上端与左侧舵机齿转动连接,本发明具有较强的延续性,一方面可有效为病人提供充足的要求,拥有5个方向自由度,方向,步态调整灵活方便,另一方面可有效的实现病人混联下肢康复训练陪同的灵活性和便捷

串并混联四足机器人腿机构的设计及运动学分析.docx
串并混联四足机器人腿机构的设计及运动学分析串并混联四足机器人腿机构的设计及运动学分析一、引言机器人技术在现代工业和科学研究中扮演着重要的角色。四足机器人作为一种常见的机器人类型,具有稳定性好、适应性广、穿越能力强等特点,被广泛应用于各个领域。机器人的腿机构设计和运动学分析是实现机器人稳定行走的关键环节。本文将着重探讨串并混联四足机器人腿机构的设计原理和运动学分析方法。二、串并混联四足机器人腿机构的设计原理串并混联四足机器人腿机构是指将多个腿通过串并、混联的方式连接到机器人的主体部分。串联方式使得整体机器人