
RV双摆线针轮减速器.pdf

是雁****找我


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

RV双摆线针轮减速器.pdf
本发明涉及一种RV双摆线针轮减速器。普通的RV减速器往往结构复杂,体积大,制造精度要求高,设计中要求考虑的问题多,成本高。本发明的组成包括:机壳(2),所述的机壳(2)一侧装有端盖(11),所述的端盖(11)中心装有输入轴(18),所述的输入轴(18)一端的中心齿轮与三组行星齿轮(3)同时啮合,并且三组行星齿轮(3)均匀分布,相隔120度;摆线轮(6)套装在所述的输入轴外侧,所述的行星齿轮中心固定有曲柄轴(20),三个所述的曲柄轴采用针齿销(8)经轴承(B5)铰接在两片相位差180°的摆线轮(6)上,输出

RV减速器的摆线针轮副接触分析.docx
RV减速器的摆线针轮副接触分析摆线针轮副是一种常见的传动装置,广泛应用于机械领域。它由轴上装有针轮的动力部分和轴上装有摆线齿轮的动力部分组成。通过齿轮的啮合来传递动力,实现减速或增速的目的。在以下的论文中,我们将对RV减速器的摆线针轮副进行接触分析,并讨论其工作原理、优点和应用领域。第一部分:概述摆线针轮副是一种类似于斜齿轮副的传动装置,但其齿形更为特殊。摆线针轮副的齿轮齿形是由齿提供的,而不是齿槽提供的,因此它的齿形轮廓更加平滑。这种特殊的齿形使得摆线针轮副具有较低的噪声和振动水平,更高的传动精度和承载
一种RV减速器摆线针轮工装.pdf
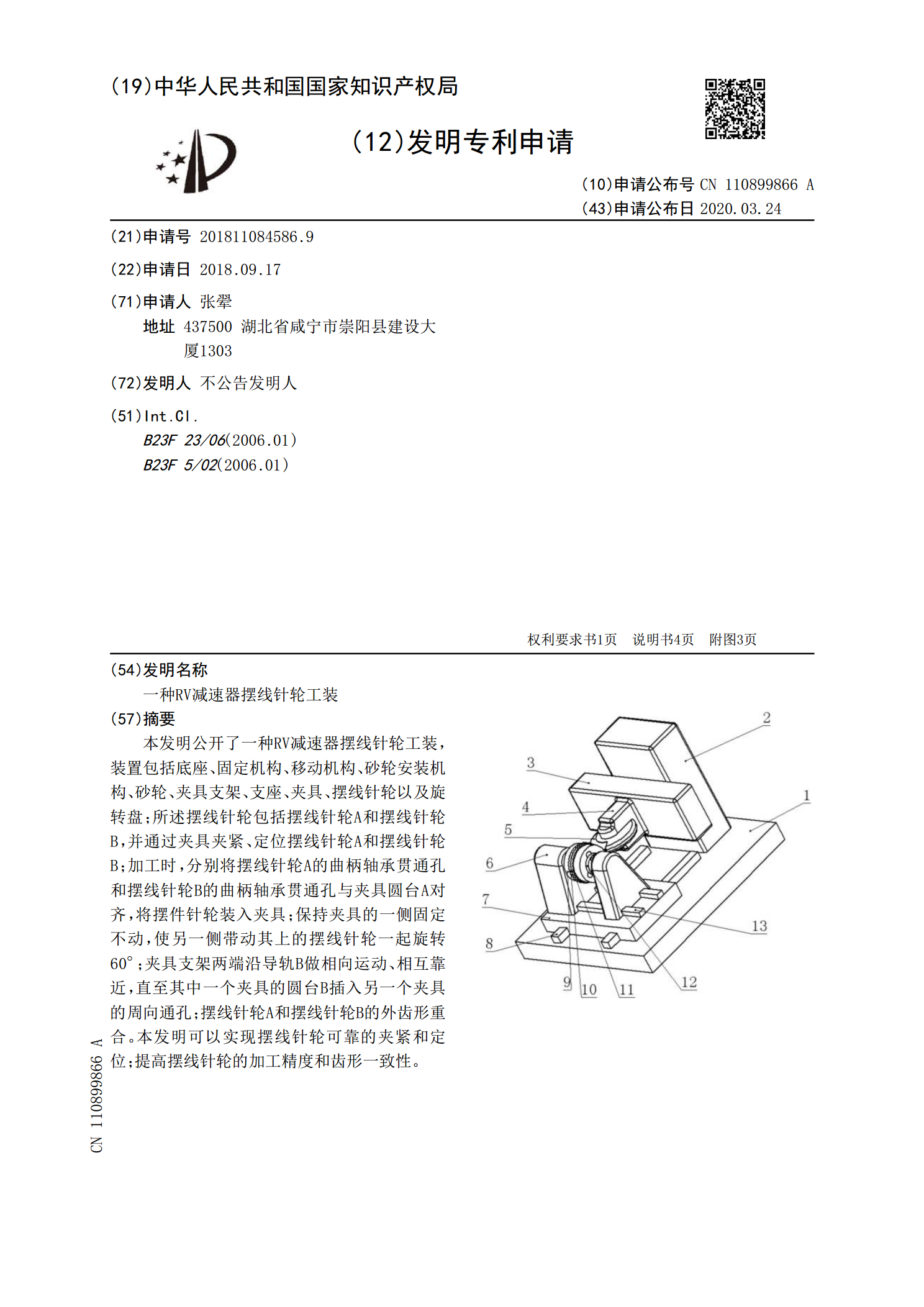
本发明公开了一种RV减速器摆线针轮工装,装置包括底座、固定机构、移动机构、砂轮安装机构、砂轮、夹具支架、支座、夹具、摆线针轮以及旋转盘;所述摆线针轮包括摆线针轮A和摆线针轮B,并通过夹具夹紧、定位摆线针轮A和摆线针轮B;加工时,分别将摆线针轮A的曲柄轴承贯通孔和摆线针轮B的曲柄轴承贯通孔与夹具圆台A对齐,将摆件针轮装入夹具;保持夹具的一侧固定不动,使另一侧带动其上的摆线针轮一起旋转60°;夹具支架两端沿导轨B做相向运动、相互靠近,直至其中一个夹具的圆台B插入另一个夹具的周向通孔;摆线针轮A和摆线针轮B的外

RV减速器摆线针轮传动部分啮合仿真分析.docx
RV减速器摆线针轮传动部分啮合仿真分析摘要:RV减速器是一种常见的重要传动装置,其摆线针轮传动部分是实现减速和传动的关键部件。本论文通过仿真分析,探讨了RV减速器摆线针轮传动部分的啮合行为,分析了其传动性能和优化方法,为RV减速器设计和优化提供了理论依据和指导。关键词:RV减速器;摆线针轮传动;啮合;仿真分析;传动性能;优化方法1.引言RV减速器是一种广泛应用于机械传动系统中的减速装置,具有结构简单、体积小、传动精度高等优点,被广泛应用于机床、工业机械、自动化设备等领域。其中,摆线针轮传动是RV减速器的核

RV减速器摆线针轮啮合间隙影响因素的分析.docx
RV减速器摆线针轮啮合间隙影响因素的分析摘要随着机械设备的发展,减速器在传动系统中扮演着重要的角色。而摆线针轮减速器作为一种新型的减速机构,由于其高传动精度、高效率和紧凑的结构,在工业自动化领域得到广泛应用。然而,摆线针轮减速器在工作过程中存在一些问题,如啮合间隙的影响,这会导致传动精度下降、噪声增加等问题。本文通过对摆线针轮减速器啮合间隙影响因素的分析,探讨了如何优化减速器的设计与制造,以改善其工作性能。1.引言减速器是一种用于降低输入轴的转速和增加输出轴的扭矩的传动装置。摆线针轮减速器由摆线齿轮和蜗轮