
可伸缩轮式蛇形机器人.pdf

新槐****公主


1/9

2/9

3/9

4/9
5/9

6/9
7/9
8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

可伸缩轮式蛇形机器人.pdf
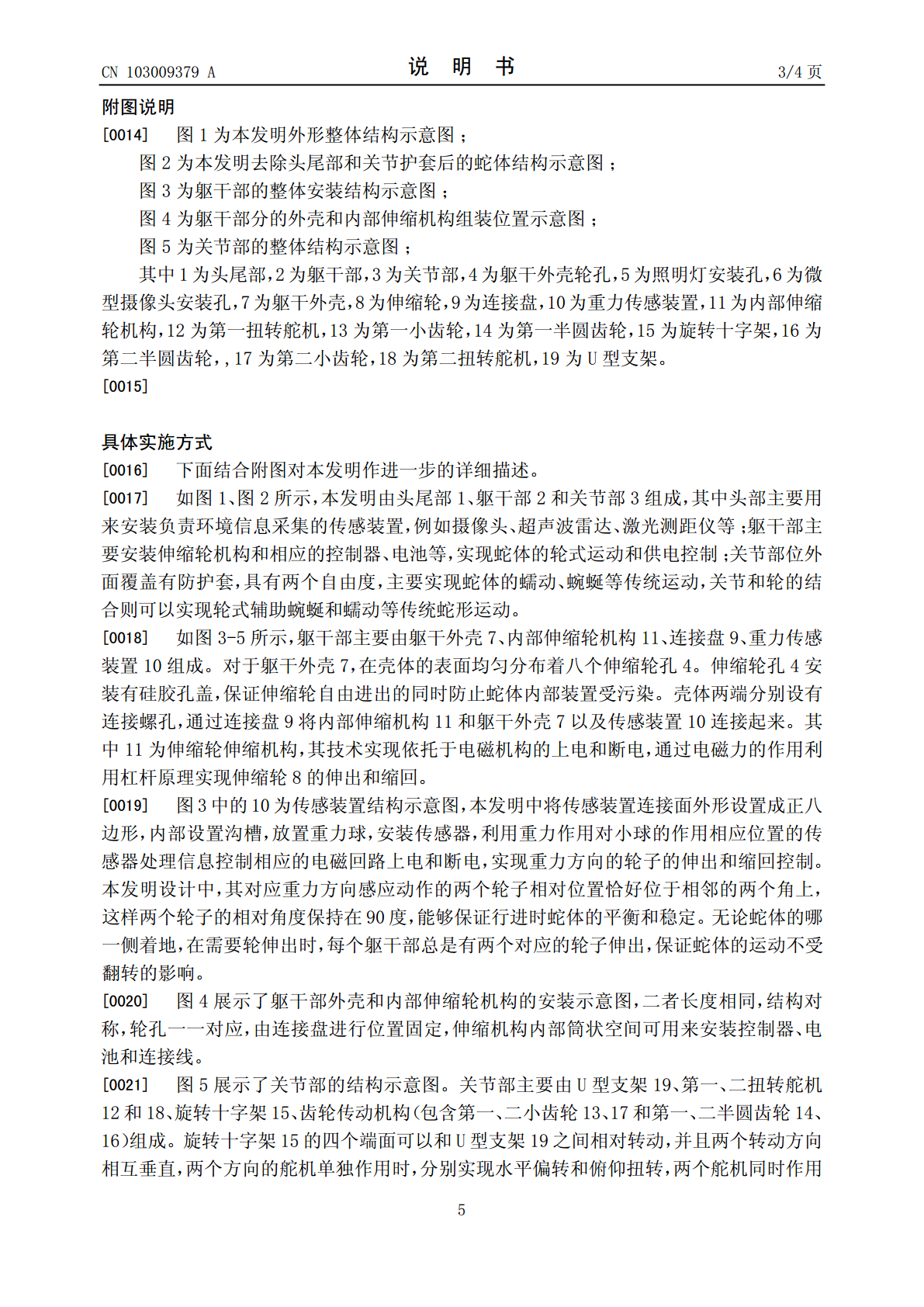
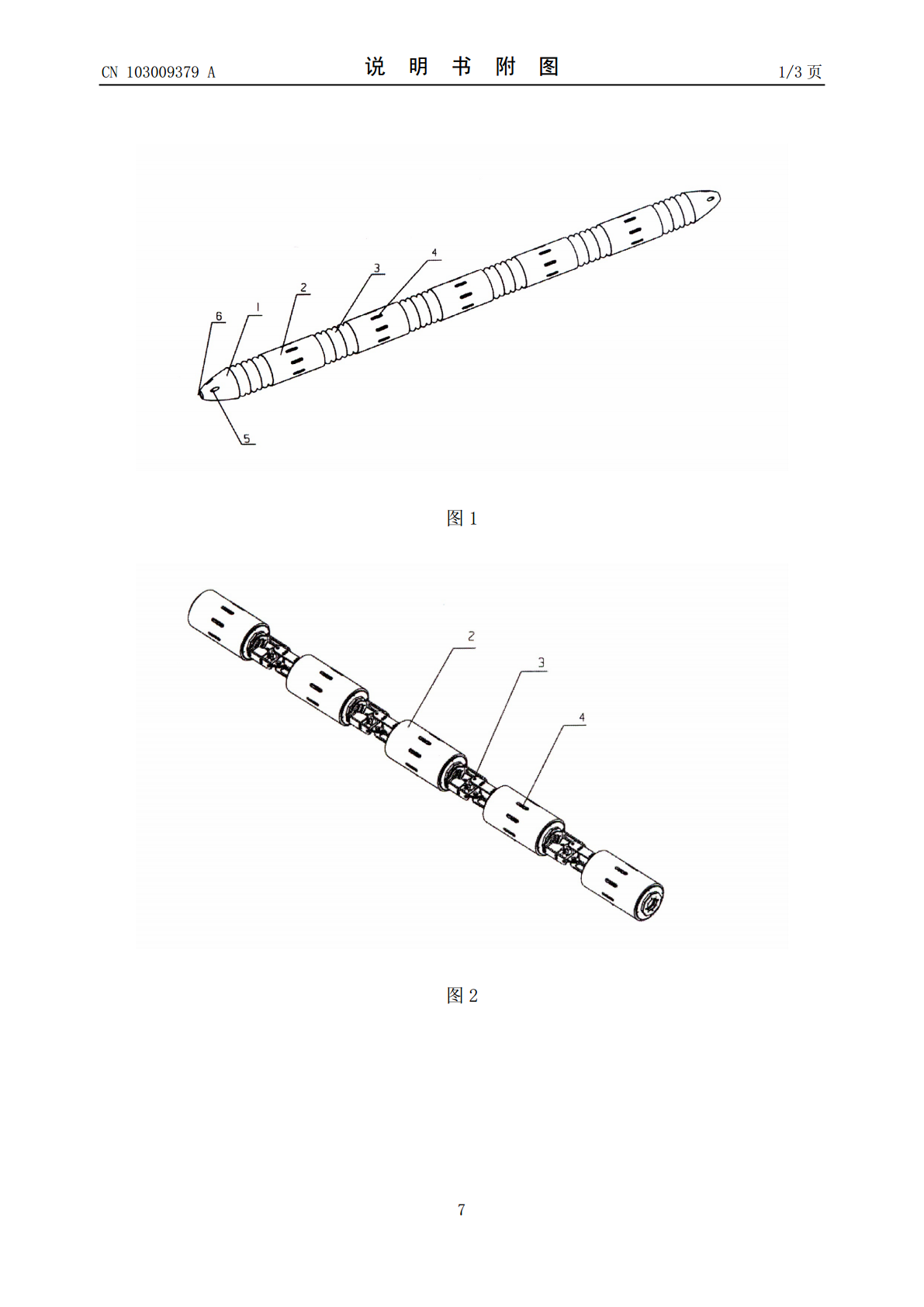
本发明公开了一种可伸缩轮式蛇形机器人。该蛇形机器人由头尾部、躯干部、关节部构成,可双向运动,其中,头尾部结构相同,设计了安装孔,可根据需要配置相应传感器;躯干部采用电磁式八向独立可伸缩轮结构,可实现轮子的重力感应式独立伸缩,靠近头尾部的躯干安装主动轮提供驱动,其他躯干部安装被动轮;关节部采用十字型齿轮结构能实现相邻模块的水平及俯仰偏转,合理调整各关节的偏转角度可以实现整个蛇体的蜿蜒和蠕动。轮式运动和蜿蜒蠕动形式彼此独立亦可结合,在复杂地形条件下能有效提升蛇形机器人的适应能力和行进速度。

一种蛇形机器人的电磁式八向独立可伸缩轮式机构.pdf
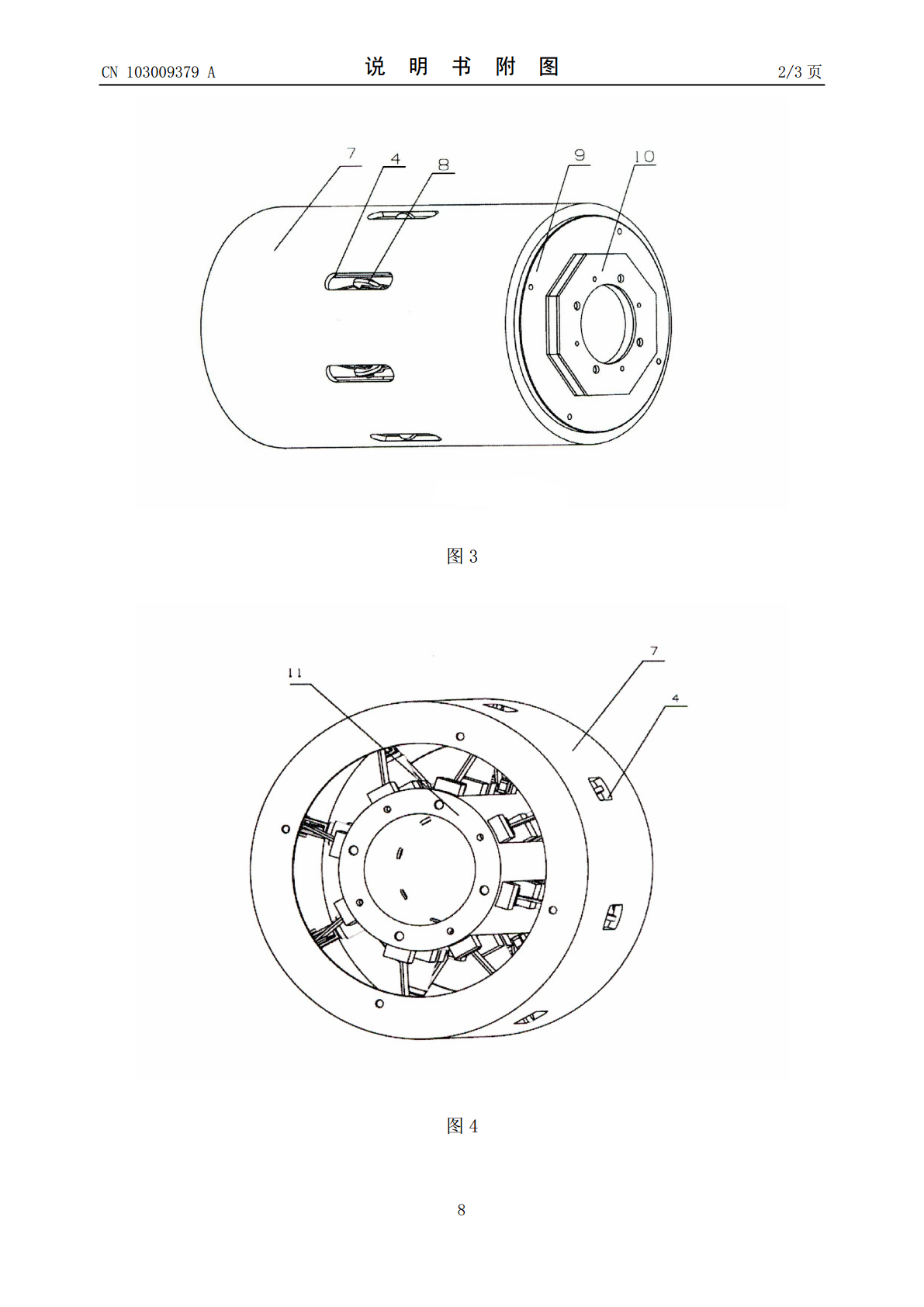
本发明公开了一种蛇形机器人的电磁式八向独立可伸缩轮式机构,该机构包括外壳、连接盘、重力传感装置、伸缩轮孔、伸缩轮、伸缩轴、推拉杆、电磁铁装置、永磁滑块和基座。外壳上均匀分布着八个伸缩轮孔,蛇形机器人在运动过程中,通过重力传感装置的控制,触发电磁铁装置工作,永磁滑块在相应磁力作用下带动推拉杆,将与触地的伸缩轮孔相邻的两个伸缩轮推出,触地方向改变时伸缩轮缩回,其相应的伸缩轮再伸出,从而实现蛇形机器人轮式运动中轮子的伸缩功能。该伸缩轮式机构具有装置简单,加工容易的特点,能保证机器人在翻转时快速响应,轮子伸缩迅速

叶片轮式蛇形机器人.pdf
本发明公开了一种叶片轮式蛇形机器人,它包括:叶片轮、机身、万向关节、电机;两个机身之间通过万向关节连接,多个机身串接在一起组成机器人的蛇身;每个机身内水平两侧各设置有一电机,在每个机身两侧各设置有一个叶片轮,电机与叶片轮传动连接。本发明的有益技术效果是:提供了一种越障能力强、地形适应能力强、结构简单的蛇形机器人。
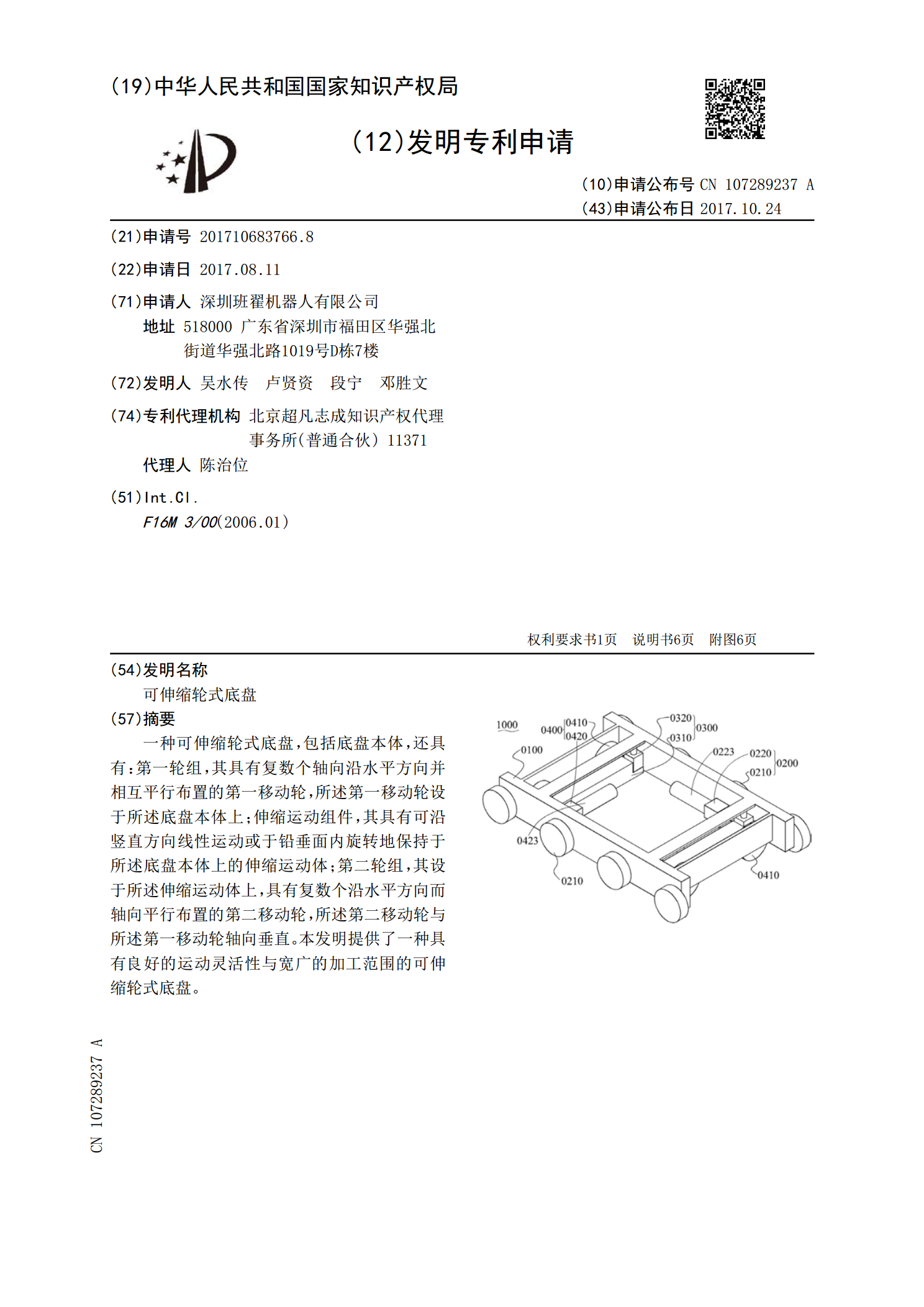
可伸缩轮式底盘.pdf
一种可伸缩轮式底盘,包括底盘本体,还具有:第一轮组,其具有复数个轴向沿水平方向并相互平行布置的第一移动轮,所述第一移动轮设于所述底盘本体上;伸缩运动组件,其具有可沿竖直方向线性运动或于铅垂面内旋转地保持于所述底盘本体上的伸缩运动体;第二轮组,其设于所述伸缩运动体上,具有复数个沿水平方向而轴向平行布置的第二移动轮,所述第二移动轮与所述第一移动轮轴向垂直。本发明提供了一种具有良好的运动灵活性与宽广的加工范围的可伸缩轮式底盘。

双棘轮式可伸缩的越障支臂及越障机器人.pdf
本发明公开了一种双棘轮式可伸缩的越障支臂及越障机器人,其中双棘轮式可伸缩的越障支臂包括间隙配合的伸缩支臂与支臂体;支臂体上固定有后行走轮,后行走轮的轴向串联有动力输出轴;伸缩支臂上固定前行走轮,前行走轮的轴向串联有传动轴;越障履带套合在后行走轮和前行走轮上;支臂体上固定有涨紧轮机构;支臂体上靠近伸缩支臂一端固定有双棘轮机构;双棘轮机构在电机编码器的控制下,带动齿条左右运动;齿条一端与伸缩支臂相连,另一端与凸轮相连;凸轮与涨紧轮机构相切配合;齿条左右运动带动凸轮左右运动和伸缩支臂伸缩滑动;凸轮运动使得涨紧轮