
机器人臂部件.pdf

光誉****君哥


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
臂模块、机器人臂及工业机器人.pdf
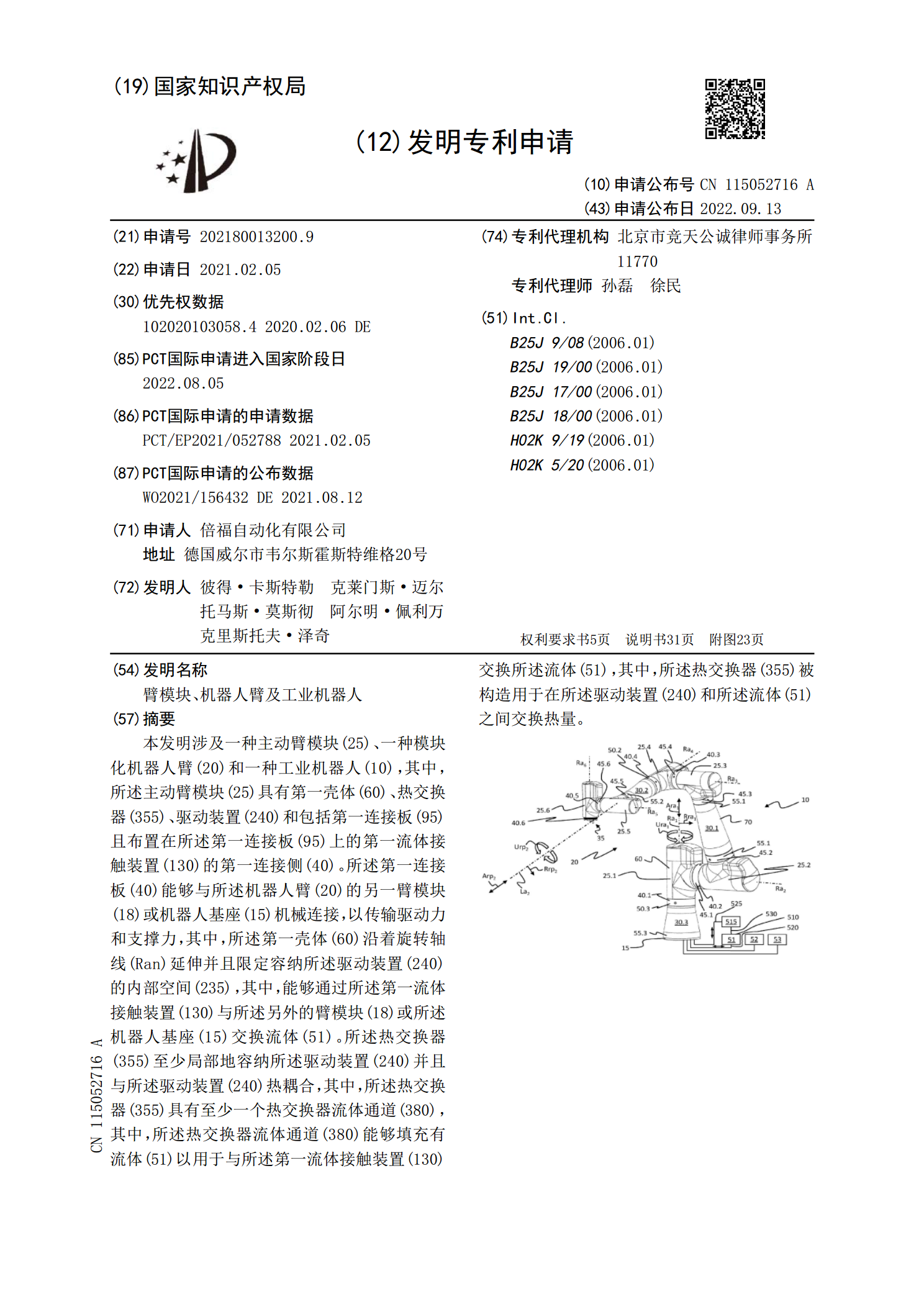
本发明涉及一种主动臂模块(25)、一种模块化机器人臂(20)和一种工业机器人(10),其中,所述主动臂模块(25)具有第一壳体(60)、热交换器(355)、驱动装置(240)和包括第一连接板(95)且布置在所述第一连接板(95)上的第一流体接触装置(130)的第一连接侧(40)。所述第一连接板(40)能够与所述机器人臂(20)的另一臂模块(18)或机器人基座(15)机械连接,以传输驱动力和支撑力,其中,所述第一壳体(60)沿着旋转轴线(Ran)延伸并且限定容纳所述驱动装置(240)的内部空间(235),其

铸件切割打磨机器人工作臂关键部件有限元分析.docx
铸件切割打磨机器人工作臂关键部件有限元分析标题:铸件切割打磨机器人工作臂关键部件有限元分析摘要:本文以铸件切割打磨机器人的工作臂关键部件为研究对象,利用有限元分析方法对其进行研究。首先,介绍了铸件切割打磨机器人的应用背景和目标,阐述了工作臂关键部件的重要性。然后,对工作臂关键部件进行了有限元建模,分析了其结构和受力特点。通过有限元分析,得到了工作臂关键部件的应力和变形情况,并对其进行了评价和优化建议。最后,总结了本文的研究成果,并对未来工作进行了展望。关键词:铸件切割打磨机器人;工作臂关键部件;有限元分析
机器人支架臂.pdf
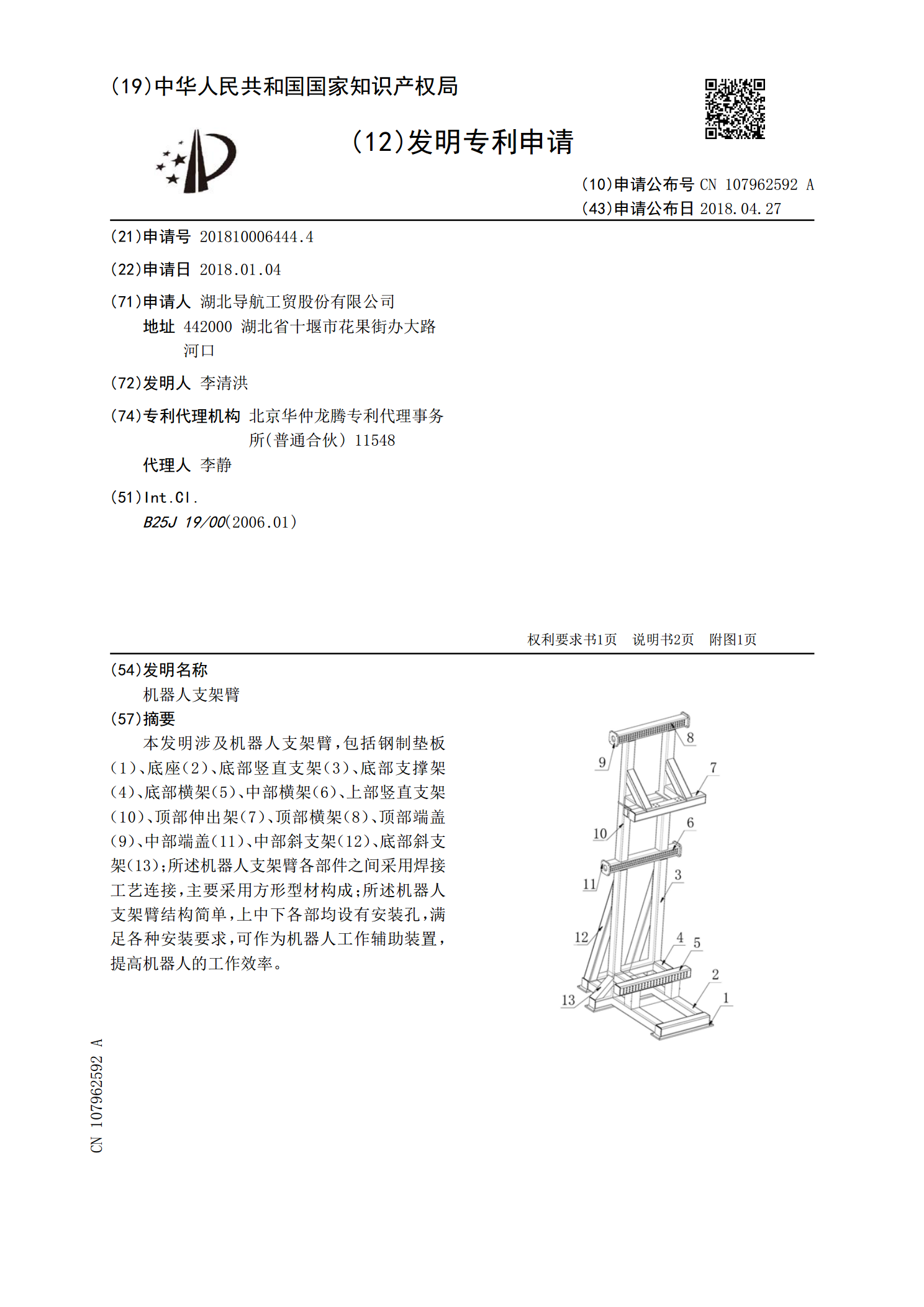
本发明涉及机器人支架臂,包括钢制垫板(1)、底座(2)、底部竖直支架(3)、底部支撑架(4)、底部横架(5)、中部横架(6)、上部竖直支架(10)、顶部伸出架(7)、顶部横架(8)、顶部端盖(9)、中部端盖(11)、中部斜支架(12)、底部斜支架(13);所述机器人支架臂各部件之间采用焊接工艺连接,主要采用方形型材构成;所述机器人支架臂结构简单,上中下各部均设有安装孔,满足各种安装要求,可作为机器人工作辅助装置,提高机器人的工作效率。
机器人臂机构.pdf
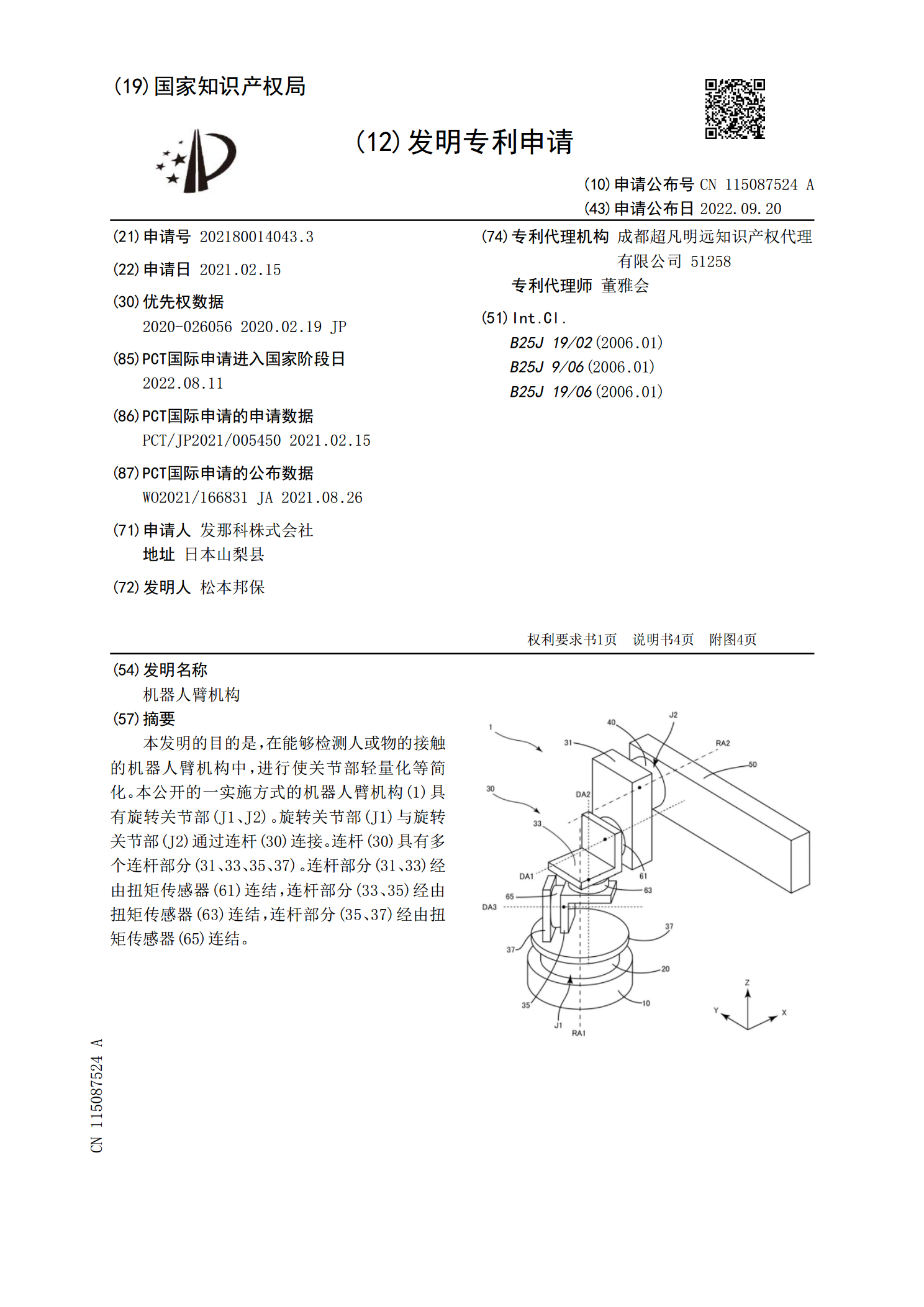
本发明的目的是,在能够检测人或物的接触的机器人臂机构中,进行使关节部轻量化等简化。本公开的一实施方式的机器人臂机构(1)具有旋转关节部(J1、J2)。旋转关节部(J1)与旋转关节部(J2)通过连杆(30)连接。连杆(30)具有多个连杆部分(31、33、35、37)。连杆部分(31、33)经由扭矩传感器(61)连结,连杆部分(33、35)经由扭矩传感器(63)连结,连杆部分(35、37)经由扭矩传感器(65)连结。

机器人的臂结构.pdf
一种机器人的臂结构,其包括支撑座、与支撑座转动连接的大臂、驱动大臂的第一驱动机构、与大臂转动连接的小臂、驱动小臂的第二驱动机构,以及手腕组件。大臂及小臂分别绕第一旋转轴线及第二旋转轴线转动。机器人的臂结构还包括与支撑座固定连接的第一圆轮、固定设置于小臂的第二圆轮、与小臂转动连接且与手腕组件固定的第三圆轮、无滑动地缠绕于第一圆轮与第二圆轮的第一挠性传动件,以及无滑动地缠绕于第二圆轮与第三圆轮的第二挠性传动件。第一、第二、第三圆轮具有相同的工作半径,且第一圆轮的中心轴线与第一旋转轴线重合,第二圆轮的中心轴线与