
铸件切割打磨机器人工作臂关键部件有限元分析.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

铸件切割打磨机器人工作臂关键部件有限元分析.docx
铸件切割打磨机器人工作臂关键部件有限元分析标题:铸件切割打磨机器人工作臂关键部件有限元分析摘要:本文以铸件切割打磨机器人的工作臂关键部件为研究对象,利用有限元分析方法对其进行研究。首先,介绍了铸件切割打磨机器人的应用背景和目标,阐述了工作臂关键部件的重要性。然后,对工作臂关键部件进行了有限元建模,分析了其结构和受力特点。通过有限元分析,得到了工作臂关键部件的应力和变形情况,并对其进行了评价和优化建议。最后,总结了本文的研究成果,并对未来工作进行了展望。关键词:铸件切割打磨机器人;工作臂关键部件;有限元分析

面向平面工件的打磨机器人关键部件有限元分析.docx
面向平面工件的打磨机器人关键部件有限元分析Title:FiniteElementAnalysisofKeyComponentsofaRoboticGrindingMachineforPlanarWorkpiecesAbstract:Withtheincreasingautomationanddemandforprecisioninmanufacturingprocesses,roboticgrindingmachineshavegainedsignificantpopularityinindustries
铸件机械臂自动打磨机.pdf
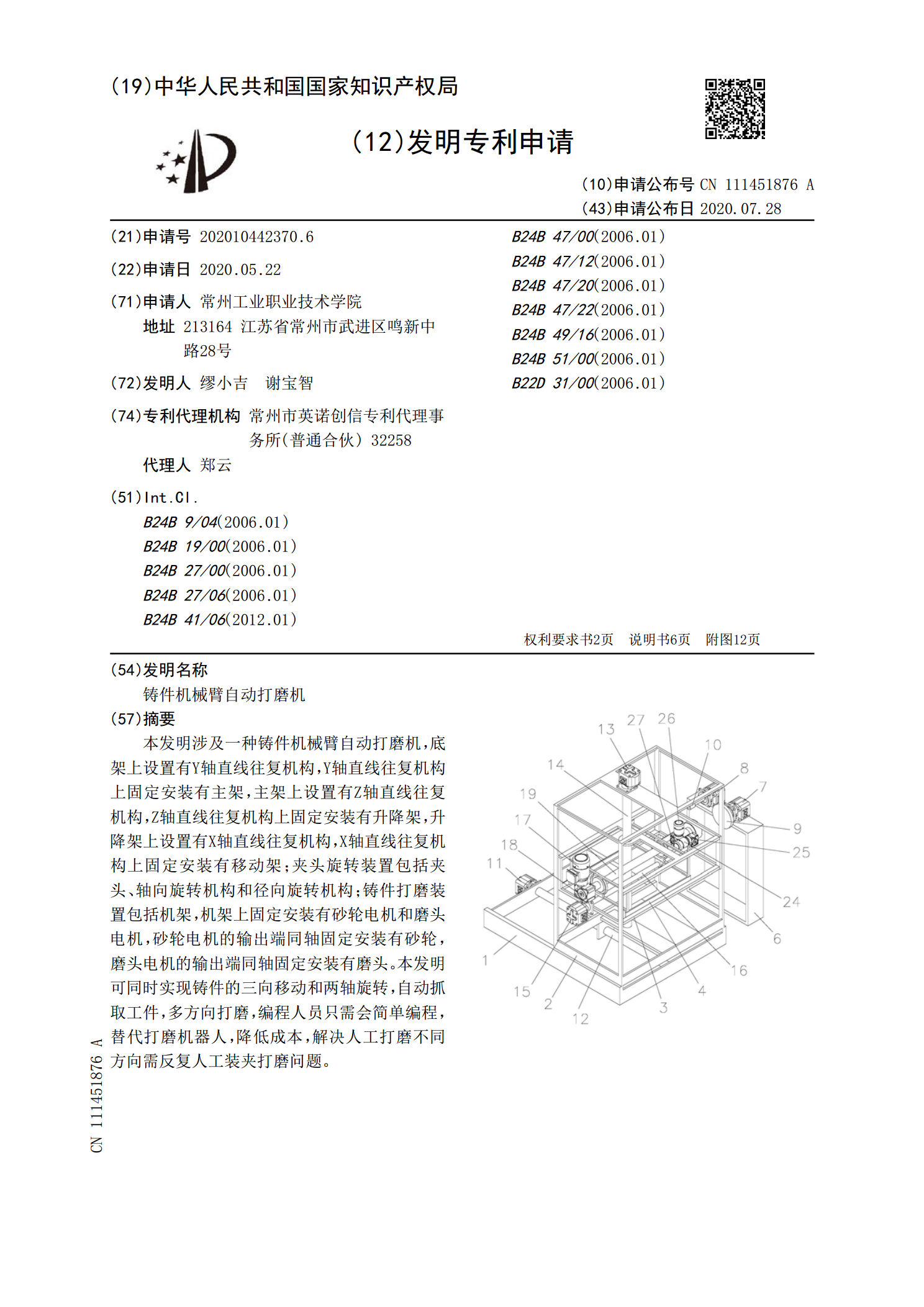
本发明涉及一种铸件机械臂自动打磨机,底架上设置有Y轴直线往复机构,Y轴直线往复机构上固定安装有主架,主架上设置有Z轴直线往复机构,Z轴直线往复机构上固定安装有升降架,升降架上设置有X轴直线往复机构,X轴直线往复机构上固定安装有移动架;夹头旋转装置包括夹头、轴向旋转机构和径向旋转机构;铸件打磨装置包括机架,机架上固定安装有砂轮电机和磨头电机,砂轮电机的输出端同轴固定安装有砂轮,磨头电机的输出端同轴固定安装有磨头。本发明可同时实现铸件的三向移动和两轴旋转,自动抓取工件,多方向打磨,编程人员只需会简单编程,替代
一种用于铸件切割打磨的一体机器人.pdf
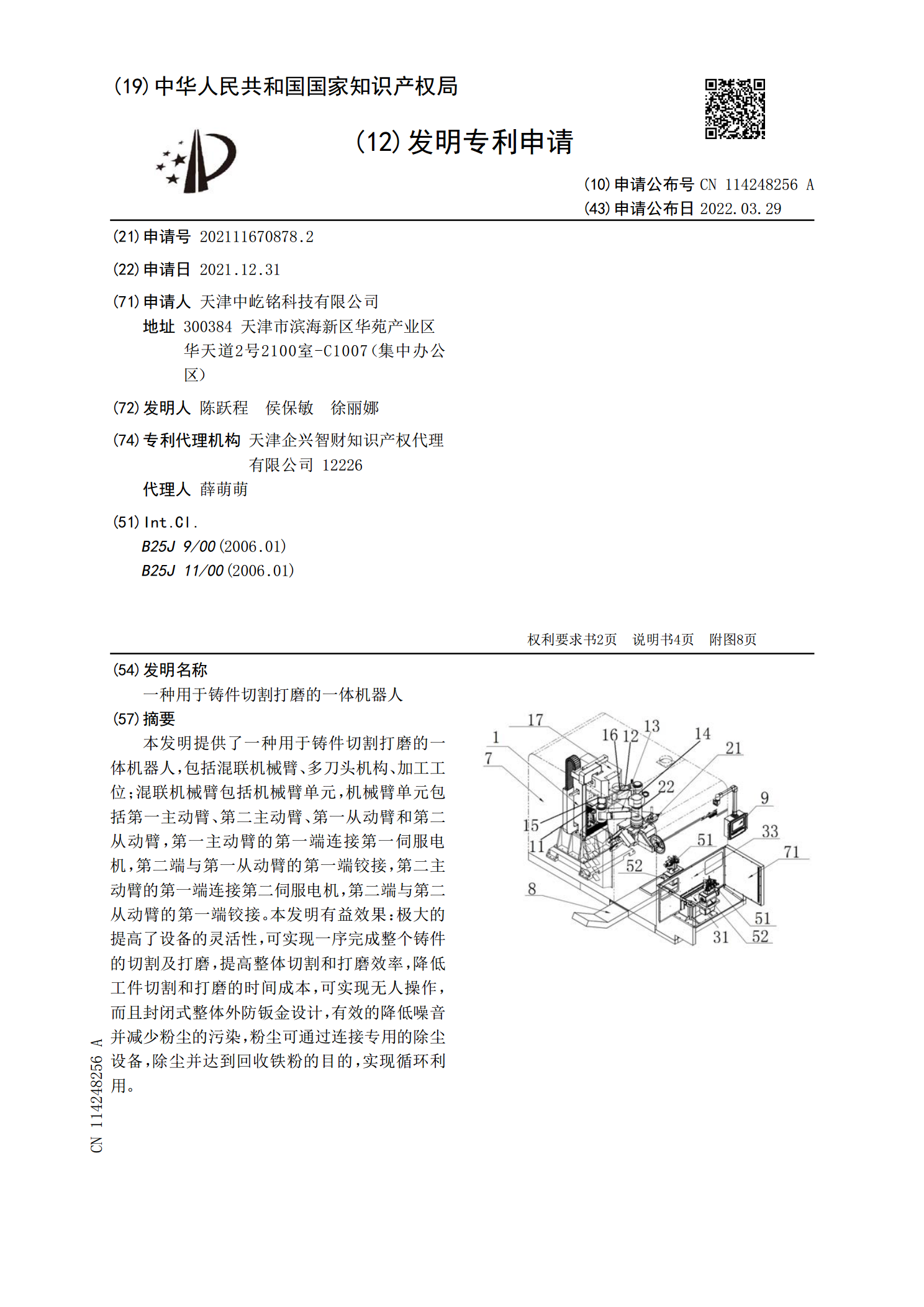
本发明提供了一种用于铸件切割打磨的一体机器人,包括混联机械臂、多刀头机构、加工工位;混联机械臂包括机械臂单元,机械臂单元包括第一主动臂、第二主动臂、第一从动臂和第二从动臂,第一主动臂的第一端连接第一伺服电机,第二端与第一从动臂的第一端铰接,第二主动臂的第一端连接第二伺服电机,第二端与第二从动臂的第一端铰接。本发明有益效果:极大的提高了设备的灵活性,可实现一序完成整个铸件的切割及打磨,提高整体切割和打磨效率,降低工件切割和打磨的时间成本,可实现无人操作,而且封闭式整体外防钣金设计,有效的降低噪音并减少粉尘的

用于机器人铸件打磨的砂轮.pdf
本发明公开了一种用于机器人铸件打磨的砂轮,包括用于单面打磨加工的主工作面以及用于转角磨削的磨削外缘,主工作面包括处于主工作面边缘并沿主工作面周向布置用于铸件复杂型面打磨加工的边缘凸起部以及处于主工作面中部用于防止铸件复杂型面打磨过程中构成阻碍的凹陷部,边缘凸起部的表面设置为沿砂轮径向分布的至少一个用于适应复杂型面表面打磨的弧形打磨面;边缘凸起部与磨削外缘之间设为向砂轮基体外凸出并用于防止打磨干涉的第一弧形过渡面,边缘凸起部与凹陷部之间设为向砂轮基体内凹陷并用于防止打磨干涉的第二弧形过渡面。适用于复杂工况既