
新的点云数据精简存储方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

新的点云数据精简存储方法.docx
新的点云数据精简存储方法随着现代传感器技术的不断发展,3D点云数据在许多领域得到了广泛应用,例如三维建模、机器人导航、虚拟现实等。然而,随着点云数据量的增加,点云数据的处理和存储变得越来越困难。为了解决此问题,近年来出现了许多点云数据精简存储方法。本文将介绍一种新的点云数据精简存储方法,并分析其优劣及应用前景。传统的点云数据存储方法是直接存储每个点的坐标和RGB值,但这种方法存在许多问题。首先,点云数据的体积很大,占用大量存储空间。其次,存储的数据存在冗余,因为大部分点云数据都是没有意义的,例如平面表面的

基于ArcGIS的摄影测量点云数据精简方法.docx
基于ArcGIS的摄影测量点云数据精简方法基于ArcGIS的摄影测量点云数据精简方法摄影测量是地理信息科学中的重要分支之一,通过对地面目标的影像进行解译和测量,可以获取目标的三维空间信息。近年来,随着航空摄影和地面激光扫描等技术的发展,点云数据成为了摄影测量的重要数据源。点云数据具有大数据量、复杂性高等特点,因此如何进行精简处理成为了摄影测量研究中的一个重要问题。ArcGIS是一款强大的地理信息系统软件,可以进行地理数据的制图、分析和可视化等操作。因此,在进行摄影测量点云数据精简时,可以使用ArcGIS提

点云数据的存储方法及装置.pdf
本发明属于计算机信息技术领域,具体涉及一种点云数据的存储方法及装置。本发明提供的点云数据的存储方法包括:计算点云数据的包围盒;按照八叉树结构对所述包围盒进行递归切分,所述八叉树结构的每个层级对应一个点距;在每次切分后,根据当前层级的点距判断切分得到的每个子单元空间内的点是否属于当前层级,以文件的形式存储属于当前层级的点的信息,其中,切分得到的每个子单元空间对应当前层级内的一个节点,每个节点对应一个文件。本发明提供的点云数据的存储方法及装置,降低了点云数据的存储量,提高了点云数据的读取、查询、渲染效率。

基于法向夹角的点云数据精简方法.pdf
本发明涉及一种基于法向夹角的点云数据精简方法,属于计算机三维建模技术领域。本发明提出的精简方法的具体步骤为:①读取原始点云数据;②获取每个数据点的k阶邻域,并计算每个数据点的单位法向量;③获取每个数据点的法向量与该数据点的k个邻近点法向量点积的均值V;④获取每个数据点所在局部区域的曲率V′;⑤对点云中的所有数据点进行分类;⑥确定每个类别的采样比;⑦对点云数据进行精简。本方法对比传统方法,具有以下优点:能够保留原始点云的细节特征;避免繁琐的二次曲面拟合与曲率估算的时间代价的。
点云数据处理方法、设备及存储介质.pdf
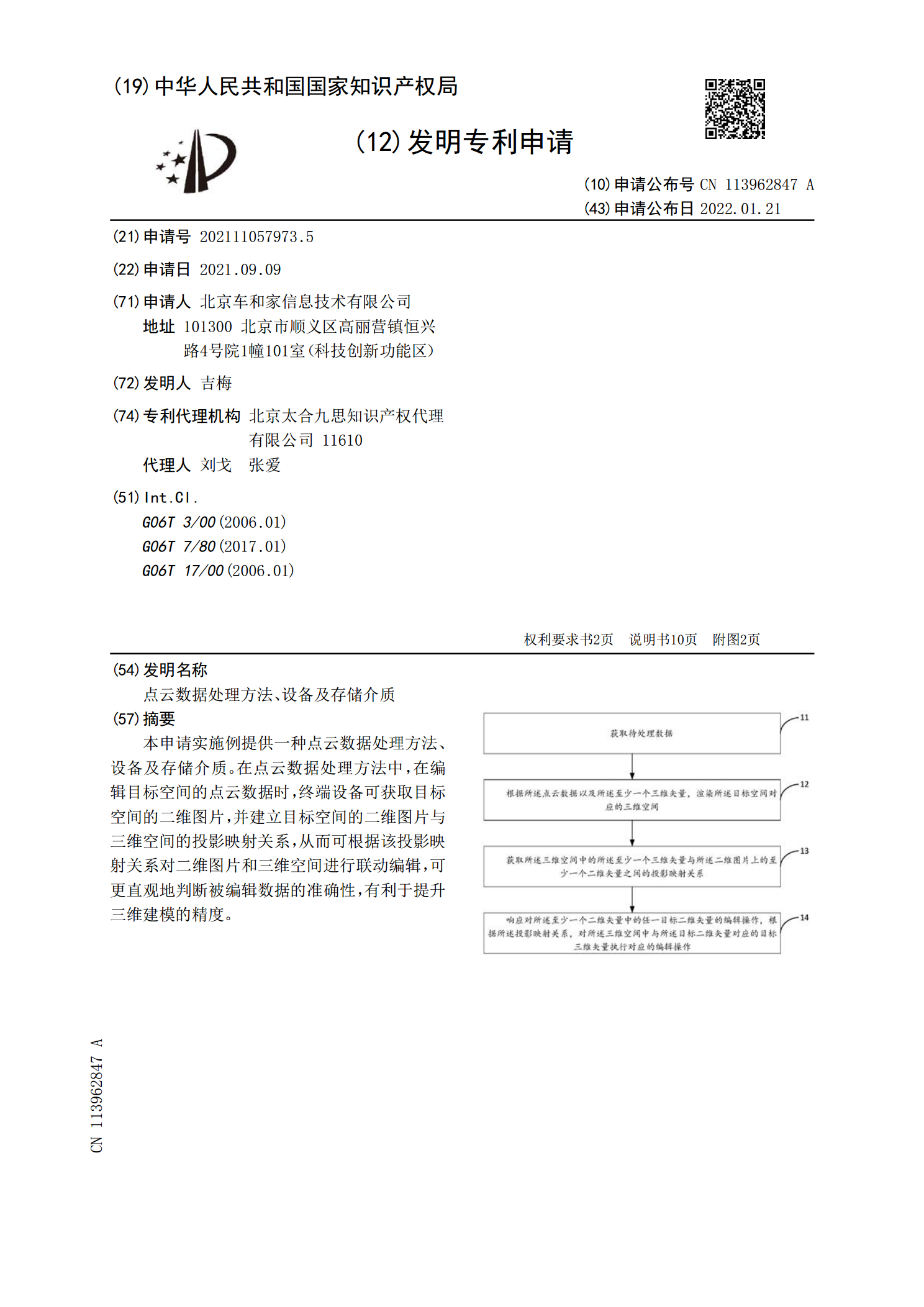
本申请实施例提供一种点云数据处理方法、设备及存储介质。在点云数据处理方法中,在编辑目标空间的点云数据时,终端设备可获取目标空间的二维图片,并建立目标空间的二维图片与三维空间的投影映射关系,从而可根据该投影映射关系对二维图片和三维空间进行联动编辑,可更直观地判断被编辑数据的准确性,有利于提升三维建模的精度。