
基于FlexRay总线的UUV通信系统设计与实现.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于FlexRay总线的UUV通信系统设计与实现.docx
基于FlexRay总线的UUV通信系统设计与实现随着科学技术的不断发展,人类对水下环境的研究和利用越来越深入。无人潜水器(UUV)作为一种先进的水下工具,被广泛应用于水下勘探、海洋环境监测、深海资源开发等领域。在UUV的应用中,通信系统是非常重要的一个组成部分,它可以实现无线数据传输和控制,同时也是保障UUV安全运行的重要环节。因此,设计和实现一种高效可靠的UUV通信系统对UUV的应用有着重要的意义。FlexRay总线作为一种先进的实时数据总线协议,已经被广泛应用于各种领域。在UUV通信系统中,使用Fle
一种基于FlexRay总线的多路FlexRay仿真系统.pdf
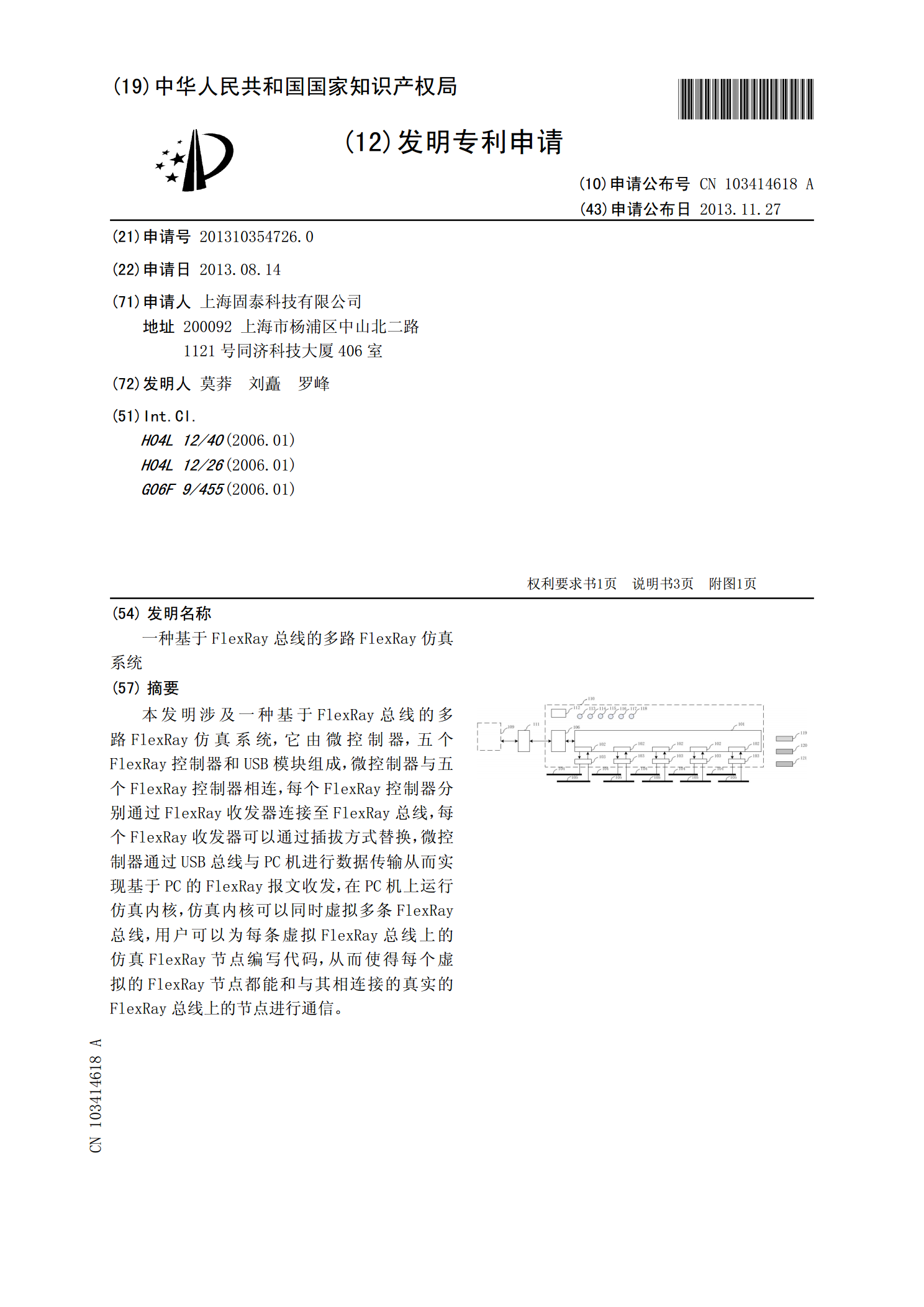
本发明涉及一种基于FlexRay总线的多路FlexRay仿真系统,它由微控制器,五个FlexRay控制器和USB模块组成,微控制器与五个FlexRay控制器相连,每个FlexRay控制器分别通过FlexRay收发器连接至FlexRay总线,每个FlexRay收发器可以通过插拔方式替换,微控制器通过USB总线与PC机进行数据传输从而实现基于PC的FlexRay报文收发,在PC机上运行仿真内核,仿真内核可以同时虚拟多条FlexRay总线,用户可以为每条虚拟FlexRay总线上的仿真FlexRay节点编写代码,

一种基于CAN总线的通信系统设计与实现.docx
一种基于CAN总线的通信系统设计与实现CAN总线是现代工业中常见的通信协议,其优点在于高可靠性和高效率。而基于CAN总线的通信系统可以实现多个设备之间的数据传输和交流,从而实现设备间的协同工作和数据共享。本文将介绍一种基于CAN总线的通信系统的设计和实现。1.系统设计通信系统的设计是关键,它直接影响到后期的实施和运行。在设计基于CAN总线的通信系统时需要考虑下面几个方面:1.1系统架构设计CAN总线的通信系统可以采用基于主从结构、Peer-to-Peer结构和混合结构等不同的架构。根据需要选择适合的架构。

基于PCI总线的高速通信系统设计与实现的中期报告.docx
基于PCI总线的高速通信系统设计与实现的中期报告一、总体要求在本次设计任务中,要求设计一种基于PCI总线的高速通信系统,具体实现任务如下:1.实现PC通过PCI总线与外部设备进行高速通信;2.支持数据传输速率高达1Gbps;3.支持DMA传输,实现数据在内存和外设之间的高速传输;4.能够实现数据传输的可靠性和数据传输的完成状态的确认。二、设计思路本次设计任务中,主要采用的是基于PCI总线的高速通信系统的设计方案。具体实现思路如下:1.硬件设计:设计一种基于PCI总线的高速通信系统的硬件,包括PCI总线控制

基于DSP和FPGA的CAN总线通信系统设计与实现.docx
基于DSP和FPGA的CAN总线通信系统设计与实现摘要:本文介绍了一个基于DSP和FPGA的CAN总线通信系统设计与实现。该系统将DSP和FPGA进行整合,实现了高速、高精度的数据通信和实时控制。在系统设计上,主要使用了硬件接口和软件算法,如CAN协议和数据计算算法。在实现中,开发了DSP和FPGA两个平台的驱动程序,并使用MATLAB和LabVIEW等软件进行算法仿真。介绍:CAN(ControllerAreaNetwork),即控制器局域网,是一种面向实时应用的串行通信总线。它最早是由德国BOSCH公