
基于DSP的激光测距防撞系统.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于DSP的激光测距防撞系统.docx
基于DSP的激光测距防撞系统摘要随着科技的发展,车辆智能化已经成为当今汽车行业发展的趋势。激光测距技术作为现代车辆智能化的一种关键技术,可以实现车辆自动化驾驶和防撞。本文主要介绍了基于DSP的激光测距防撞系统的设计和实现。该系统采用天线式激光测距传感器,通过DSP处理器实现信号处理和数据平滑,从而实现了激光测距与障碍物距离的准确测量和防撞预警功能。实验结果表明,该系统在现实道路交通场景中具有较高的稳定性和可靠性。关键词:DSP,激光测距,防撞系统,自动化驾驶一、引言近年来,随着汽车工业向智能化发展,智能化

基于激光测距的船舶防撞定位系统设计.pdf
第28卷第6期应用激光Vol.28,No.62008年12月APPLIEDLASERDecember2008基于激光测距的船舶防撞定位系统设计3章坚武,张数明(杭州电子科技大学通信工程学院,浙江杭州310018)提要介绍一种基于激光测距的船舶防撞定位报警系统的设计原理,给出了系统的硬件设计和程序设计方法。在船舶上合理布置激光测距传感器,利用反射激光测量待测距离。实时自主的监测目标船舶与周围船舶的距离和方位,当进入待测领域的船只与目标船舶达到设定的安全距离时,实现声光报警,避免船舶相撞。由于整个系统的经济性

基于激光测距技术的汽车防撞系统的研究.pdf

基于DSP水下测距系统的研究.docx
基于DSP水下测距系统的研究基于DSP水下测距系统的研究摘要:水下测距系统在海洋环境中具有重要意义,可以用于海洋资源勘探、水下结构的监测等领域。本论文首先对DSP技术进行了简要介绍,并阐述了水下测距系统的原理和应用场景。然后详细描述了设计与实现DSP水下测距系统的方法,并分析了系统的优缺点。最后对未来的研究方向和发展前景进行了展望。关键词:DSP,水下测距系统,原理,应用场景,设计与实现,优缺点,研究方向,发展前景一、引言随着经济的发展和海洋资源的逐渐开发,水下测距系统在海洋环境中扮演着重要的角色。它可以
激光测距防撞报警装置.pdf
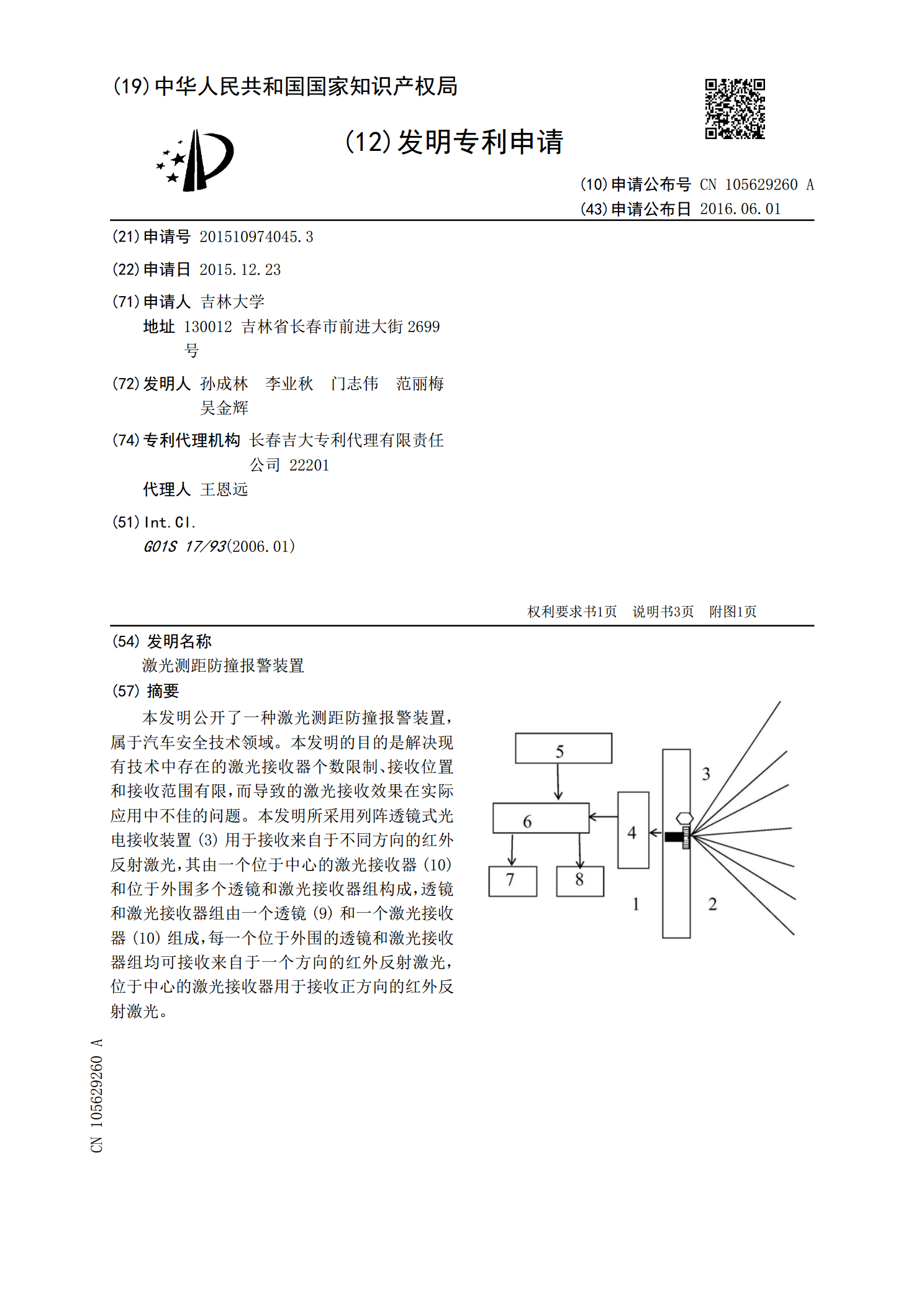
本发明公开了一种激光测距防撞报警装置,属于汽车安全技术领域。本发明的目的是解决现有技术中存在的激光接收器个数限制、接收位置和接收范围有限,而导致的激光接收效果在实际应用中不佳的问题。本发明所采用列阵透镜式光电接收装置(3)用于接收来自于不同方向的红外反射激光,其由一个位于中心的激光接收器(10)和位于外围多个透镜和激光接收器组构成,透镜和激光接收器组由一个透镜(9)和一个激光接收器(10)组成,每一个位于外围的透镜和激光接收器组均可接收来自于一个方向的红外反射激光,位于中心的激光接收器用于接收正方向的红外