
基于Canny算子和Hough变换的夜间车道线检测.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于Canny算子和Hough变换的夜间车道线检测.docx
基于Canny算子和Hough变换的夜间车道线检测夜间车道线检测是自动驾驶和智能交通系统中非常重要的一个任务。在夜间条件下,由于光线不足和环境的不确定性,道路上的车道线往往会变得模糊不清,容易误读或忽略。因此,为了确保车辆能够准确地识别和跟踪车道线,有必要开发一种有效的夜间车道线检测算法。本文提出了一种基于Canny算子和Hough变换的夜间车道线检测方法。Canny算子是一种经典的边缘检测算法,可以有效地检测图像中的边缘。Hough变换是一种将像素空间映射到参数空间的方法,可以将边缘点转换为直线方程。结

基于反透视变换和Hough变换的车道线检测.docx
基于反透视变换和Hough变换的车道线检测引言车道线检测是自动驾驶技术中的一个重要环节。通过识别和跟踪车道线,可以确定车辆在道路上的位置,并做出相应的行驶决策。在现实情况中,道路的形状和车速的变化都会影响车道线检测结果的准确性。因此,本文将结合反透视变换和Hough变换来提高车道线检测的准确性和效率。反透视变换反透视变换也称为鸟瞰图变换,是将车辆前方视野变换为竖直方向的处理方法,以便更好地识别车道线。反透视变换基于透视投影的原理,将车道线投影到一个新的平面上,使得车辆的视角变化不会影响车道线的位置。具体实

基于改进Hough变换的车道线检测.pptx
汇报人:CONTENTSPARTONEPARTTWO基本思想:通过投票机制,将图像中的直线检测出来步骤:a.边缘检测:提取图像中的边缘信息b.投票:将边缘点映射到参数空间,统计每个参数点的投票数c.阈值:设定阈值,过滤掉投票数较少的参数点d.直线拟合:根据投票数最多的参数点,拟合出直线方程a.边缘检测:提取图像中的边缘信息b.投票:将边缘点映射到参数空间,统计每个参数点的投票数c.阈值:设定阈值,过滤掉投票数较少的参数点d.直线拟合:根据投票数最多的参数点,拟合出直线方程优点:能够检测出图像中的直线缺点:
基于Canny算子和Hough变换的大倾角证件图像矫正方法及系统.pdf
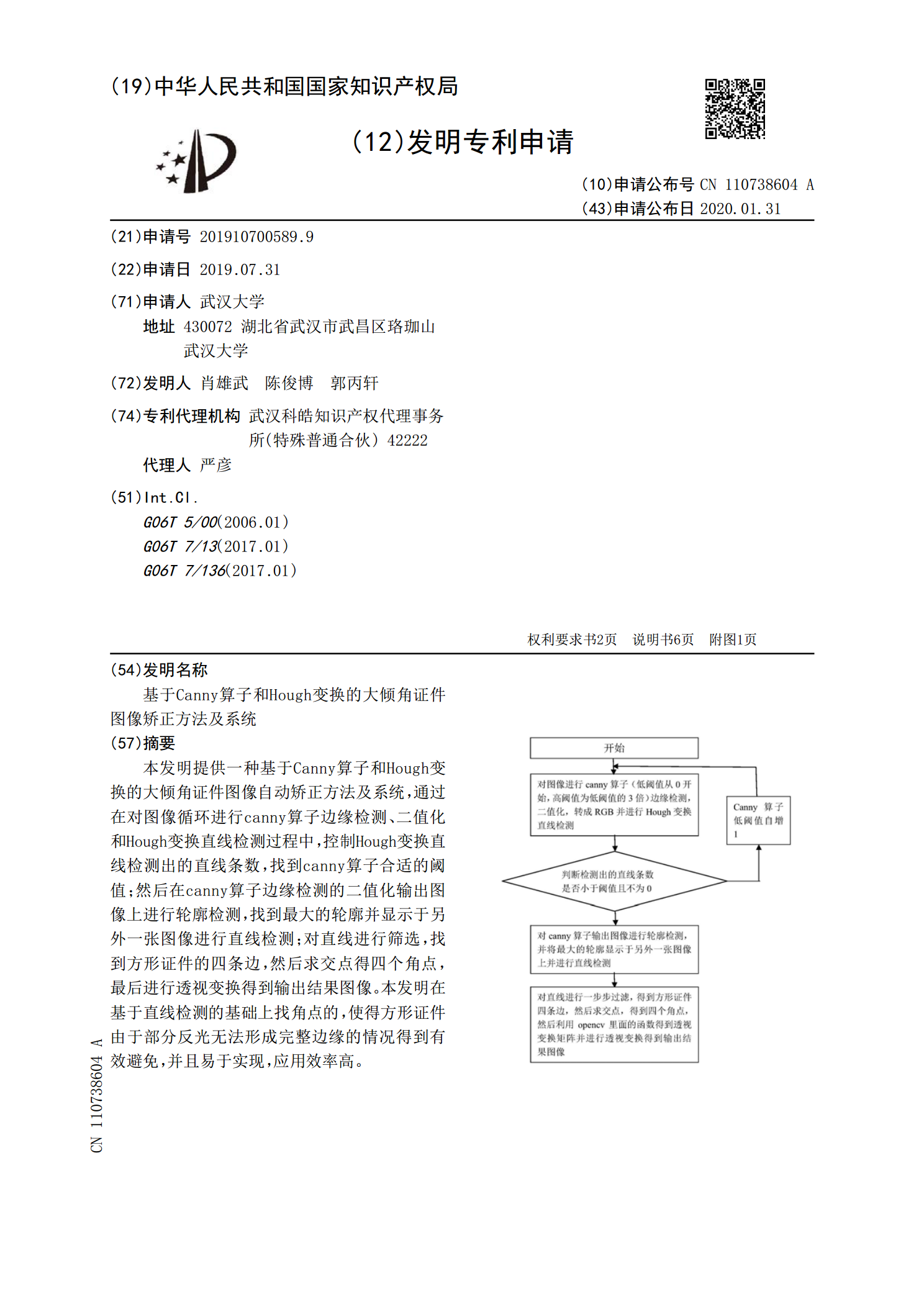
本发明提供一种基于Canny算子和Hough变换的大倾角证件图像自动矫正方法及系统,通过在对图像循环进行canny算子边缘检测、二值化和Hough变换直线检测过程中,控制Hough变换直线检测出的直线条数,找到canny算子合适的阈值;然后在canny算子边缘检测的二值化输出图像上进行轮廓检测,找到最大的轮廓并显示于另外一张图像进行直线检测;对直线进行筛选,找到方形证件的四条边,然后求交点得四个角点,最后进行透视变换得到输出结果图像。本发明在基于直线检测的基础上找角点的,使得方形证件由于部分反光无法形成完

基于Matlab和优化Hough变换的高速公路车道线检测方法.docx
基于Matlab和优化Hough变换的高速公路车道线检测方法摘要:本论文研究了基于Matlab和优化Hough变换的高速公路车道线检测方法。首先介绍了车道线检测的意义和应用场景,然后介绍了车道线检测的基本原理和算法。在此基础上,研究了Hough变换算法的优化方法以提高车道线检测的准确性和效率。最后,通过实验验证了所提出的方法的有效性和可行性。关键词:Matlab;Hough变换;车道线检测;优化算法;高速公路。一、引言随着社会的不断发展和交通工具的日益普及,车辆数量急剧增长,车辆行驶安全问题逐渐受到人们的