
基于Canny算子和Hough变换的大倾角证件图像矫正方法及系统.pdf

努力****恨风

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于Canny算子和Hough变换的大倾角证件图像矫正方法及系统.pdf
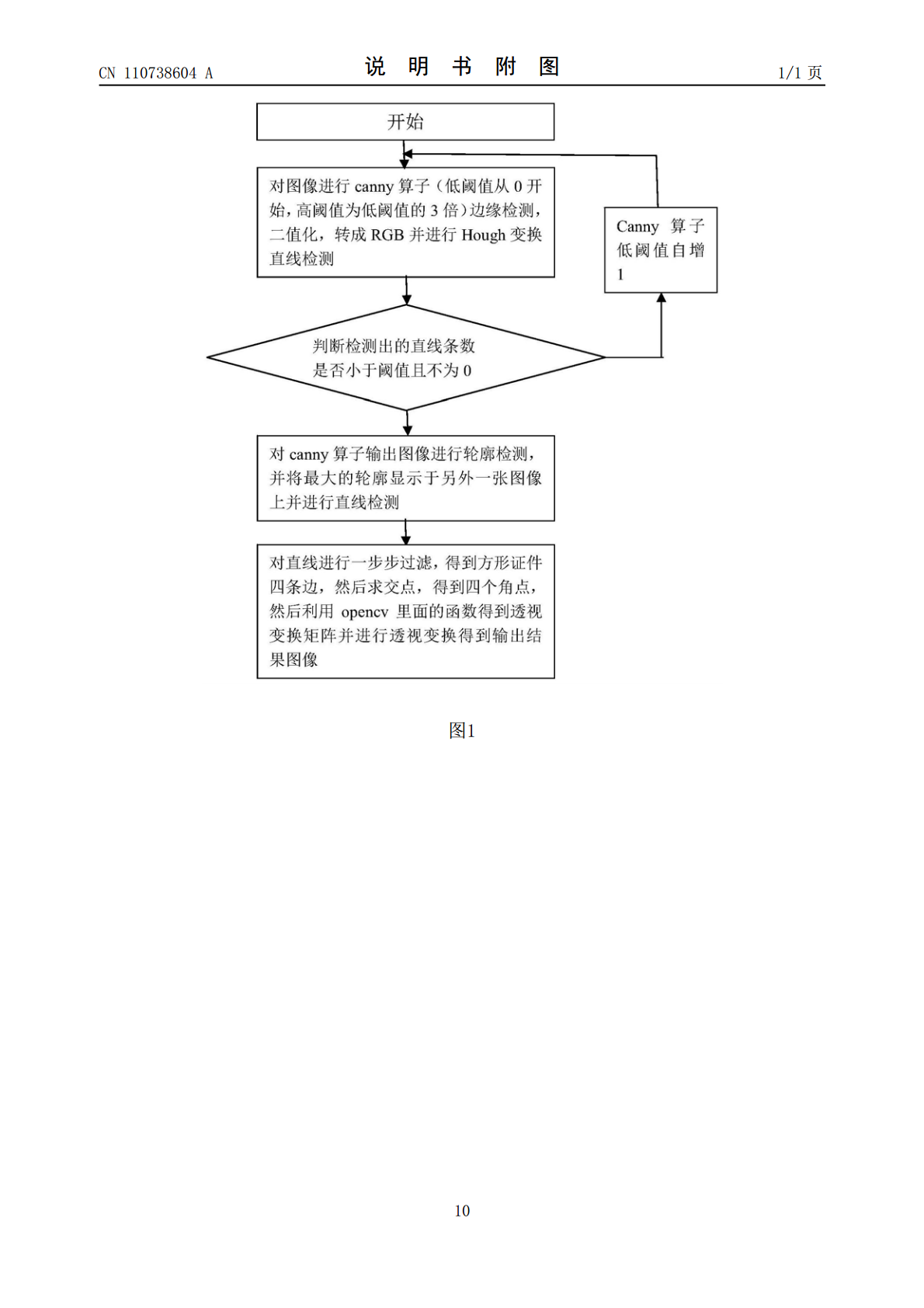
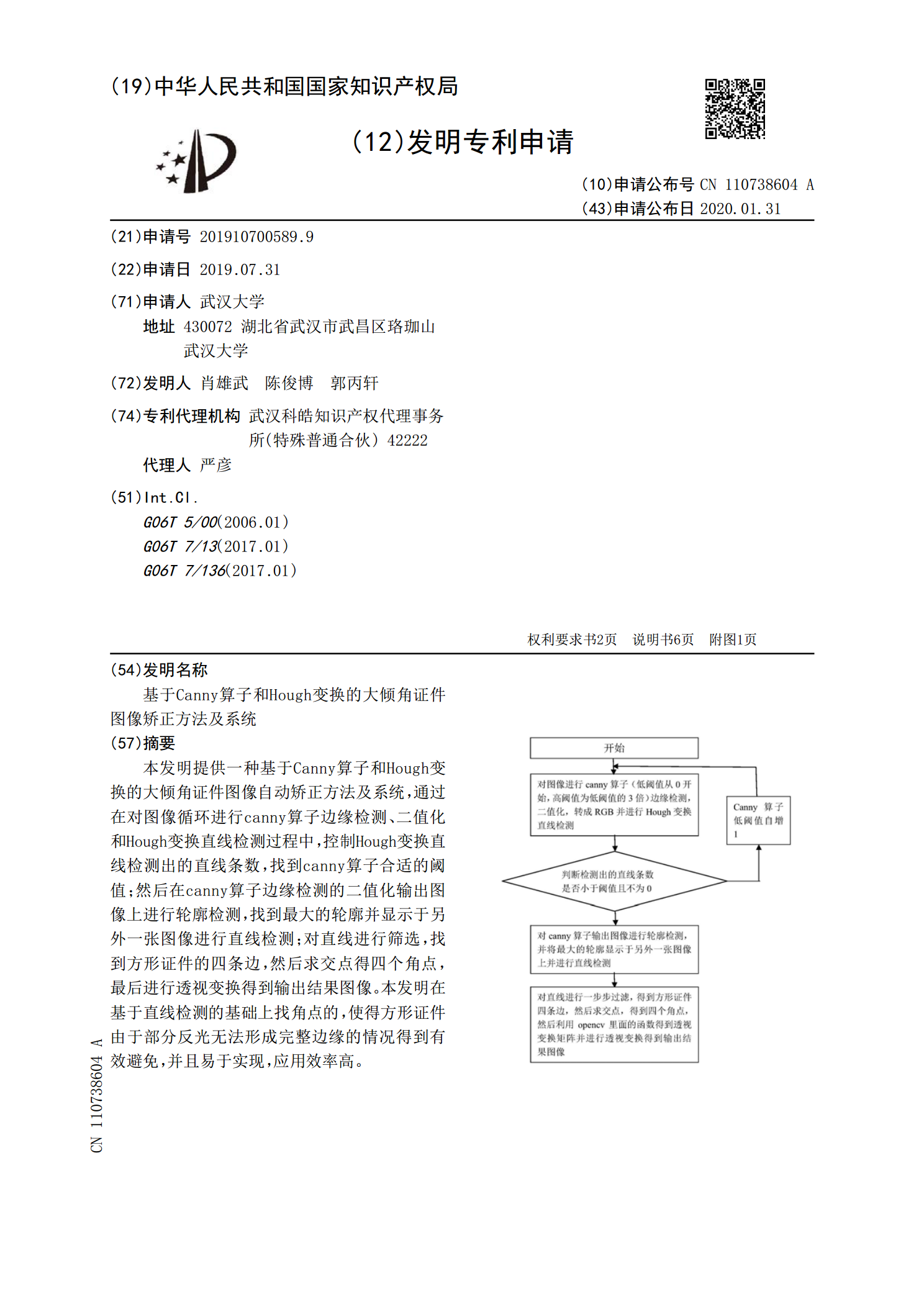
本发明提供一种基于Canny算子和Hough变换的大倾角证件图像自动矫正方法及系统,通过在对图像循环进行canny算子边缘检测、二值化和Hough变换直线检测过程中,控制Hough变换直线检测出的直线条数,找到canny算子合适的阈值;然后在canny算子边缘检测的二值化输出图像上进行轮廓检测,找到最大的轮廓并显示于另外一张图像进行直线检测;对直线进行筛选,找到方形证件的四条边,然后求交点得四个角点,最后进行透视变换得到输出结果图像。本发明在基于直线检测的基础上找角点的,使得方形证件由于部分反光无法形成完

基于Canny算子和Hough变换的夜间车道线检测.docx
基于Canny算子和Hough变换的夜间车道线检测夜间车道线检测是自动驾驶和智能交通系统中非常重要的一个任务。在夜间条件下,由于光线不足和环境的不确定性,道路上的车道线往往会变得模糊不清,容易误读或忽略。因此,为了确保车辆能够准确地识别和跟踪车道线,有必要开发一种有效的夜间车道线检测算法。本文提出了一种基于Canny算子和Hough变换的夜间车道线检测方法。Canny算子是一种经典的边缘检测算法,可以有效地检测图像中的边缘。Hough变换是一种将像素空间映射到参数空间的方法,可以将边缘点转换为直线方程。结

基于改进Canny检测与Hough变换的仪表图像识别算法.docx
基于改进Canny检测与Hough变换的仪表图像识别算法基于改进Canny检测与Hough变换的仪表图像识别算法摘要:仪表图像识别是机器视觉领域的重要研究方向之一。本论文提出了一种基于改进Canny检测与Hough变换的仪表图像识别算法。首先,利用改进Canny算法提取仪表图像的边缘特征,并通过边缘连接和边缘选取策略优化边缘检测结果。然后,采用改进的Hough变换方法进行仪表图像的直线检测,进一步提取仪表指针的位置信息。最后,通过图像处理与机器学习相结合的方法,实现仪表图像的识别和测量。实验结果表明,本文

基于Canny算子图像边缘检测的改进方法.docx
基于Canny算子图像边缘检测的改进方法基于Canny算子图像边缘检测的改进方法摘要:图像边缘检测是计算机视觉领域中的重要研究方向之一,它在很多图像处理任务中起着关键作用。Canny算子是一种经典的边缘检测算法,具有高精度和低误差的特点。然而,传统的Canny算子在某些场景下仍然存在一些缺陷,如对噪声敏感、边缘断裂等。因此,本文基于Canny算子进行图像边缘检测的改进,提出了一种新的方法,旨在提高算法的鲁棒性和准确性。1.引言图像边缘检测是计算机视觉中的基本任务,它在目标检测、识别和图像分析等领域中具有广
基于Sobel算子和Wigner‑Hough变换的齿轮故障特征提取方法.pdf
本发明公开了一种基于Sobel算子和Wigner‑Hough变换的齿轮故障特征提取方法,包括如下步骤:(1)输入齿轮故障信号