
一种可用于机器人关节驱动的线管绳索传动系统.pdf

邻家****文章


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可用于机器人关节驱动的线管绳索传动系统.pdf
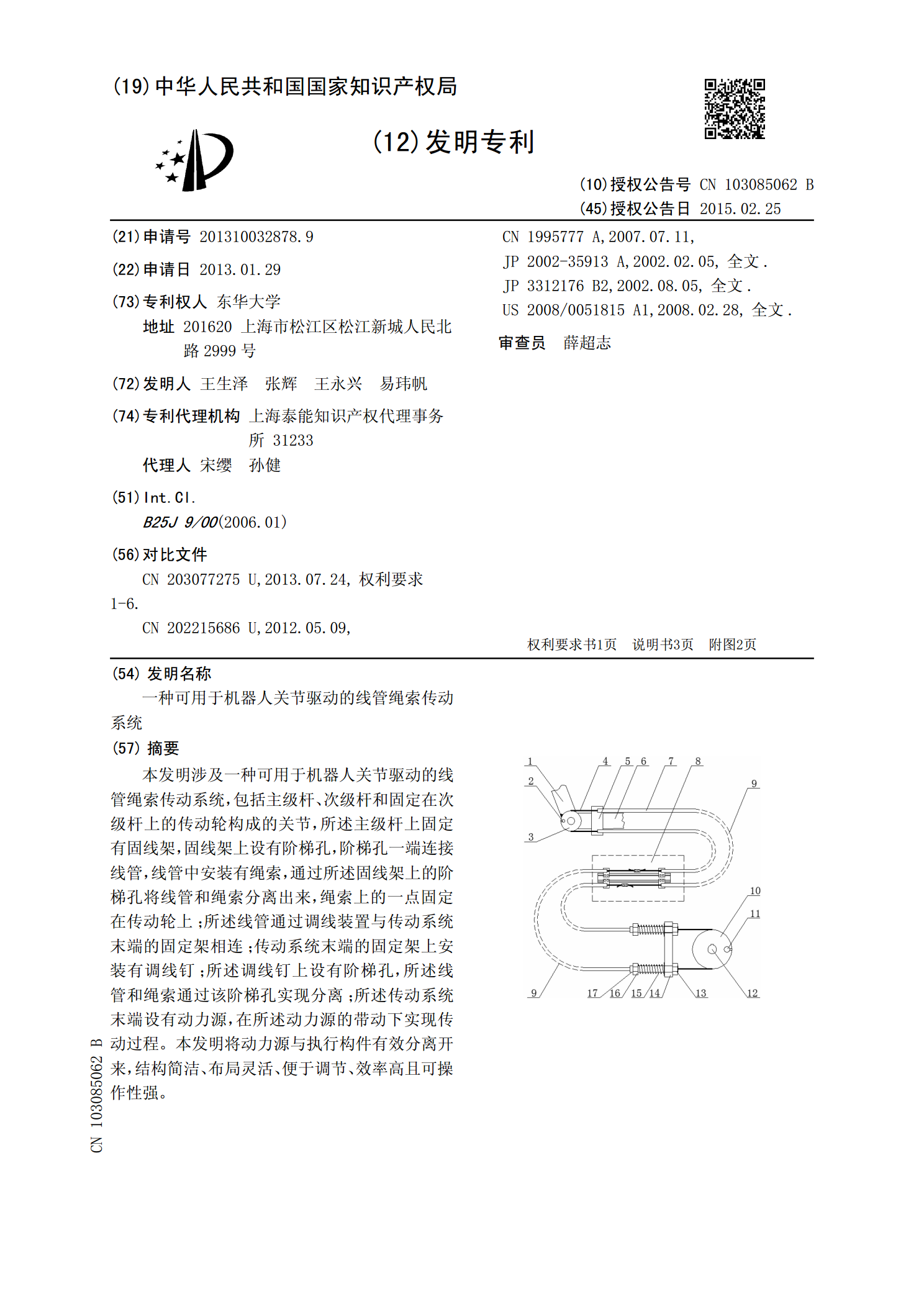
本发明涉及一种可用于机器人关节驱动的线管绳索传动系统,包括主级杆、次级杆和固定在次级杆上的传动轮构成的关节,所述主级杆上固定有固线架,固线架上设有阶梯孔,阶梯孔一端连接线管,线管中安装有绳索,通过所述固线架上的阶梯孔将线管和绳索分离出来,绳索上的一点固定在传动轮上;所述线管通过调线装置与传动系统末端的固定架相连;传动系统末端的固定架上安装有调线钉;所述调线钉上设有阶梯孔,所述线管和绳索通过该阶梯孔实现分离;所述传动系统末端设有动力源,在所述动力源的带动下实现传动过程。本发明将动力源与执行构件有效分离开来,

绳索驱动踝关节康复机器人.pdf
本发明提供一种绳索驱动踝关节康复机器人,包括定平台和动平台。其中定平台起框架支撑作用,4个绳索驱动电动机和旋转驱动电动机固定于其上,可绕垂直轴旋转的绳索过轮保证了绳索方向的随意性;动平台是受刚性约束的绳索牵引平台,具有4个自由度,自由度输出类型为3R1T,其中绳索驱动实现绕矢状轴、冠状轴转动,旋转驱动实现绕垂直轴转动,三个回转副共点,等效出了一个球面副,同时通过滑块导轨实现了移动副的功能。在动平台上脚踏板处引入一个了位置调节装置,用于调整训练者脚掌高度,使机器人等效球面副回转中心与训练者踝关节转动中心相重
一种绳索驱动的机器人.pdf
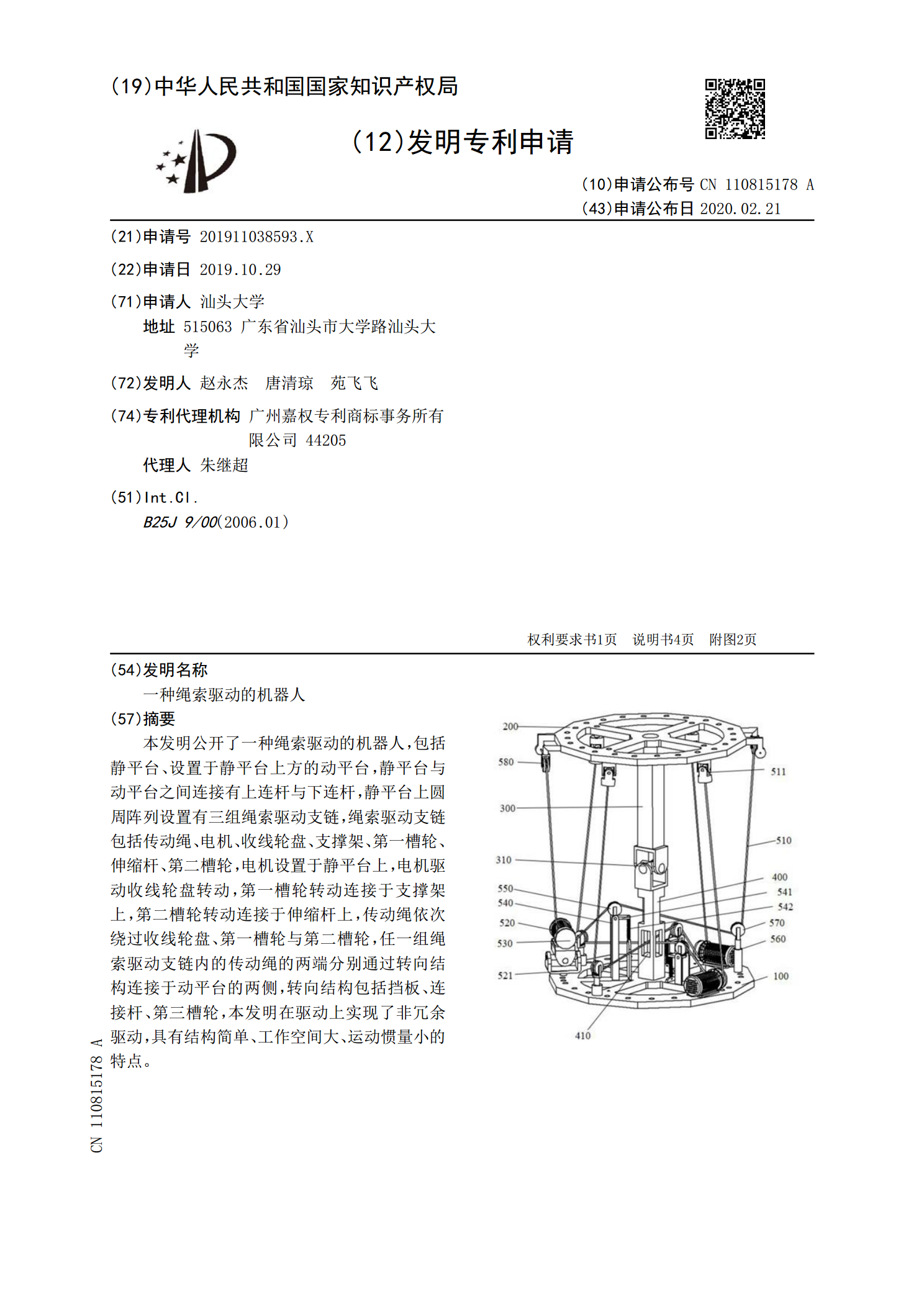
本发明公开了一种绳索驱动的机器人,包括静平台、设置于静平台上方的动平台,静平台与动平台之间连接有上连杆与下连杆,静平台上圆周阵列设置有三组绳索驱动支链,绳索驱动支链包括传动绳、电机、收线轮盘、支撑架、第一槽轮、伸缩杆、第二槽轮,电机设置于静平台上,电机驱动收线轮盘转动,第一槽轮转动连接于支撑架上,第二槽轮转动连接于伸缩杆上,传动绳依次绕过收线轮盘、第一槽轮与第二槽轮,任一组绳索驱动支链内的传动绳的两端分别通过转向结构连接于动平台的两侧,转向结构包括挡板、连接杆、第三槽轮,本发明在驱动上实现了非冗余驱动,具

一种用于驱动机器人关节转动的装置.pdf
本发明公开了一种用于驱动机器人关节转动的装置,它包括齿轮转动机构、驱动齿轮转动机构转动的液压驱动机构,待转动机器人关节与齿轮转动机构固定相连。液压驱动机构包括第一液压缸、第二液压缸以及分别驱动第一液压缸和第二液压缸内活塞向相反的方向运动的驱动装置。齿轮转动机构包括齿轮以及平行设置的第一齿条和第二齿条,第一液压缸内活塞背离第一连接管的一侧与第一齿条一端固定相连,第二液压缸内活塞背离第二连接管的一侧与第二齿条一端固定相连,且齿轮分别与第一齿条和第二齿条相啮合。本发明相比现有技术,在能驱动机器人关节转动的前提下
一种用于绳索驱动型柔性机械臂的驱动装置.pdf
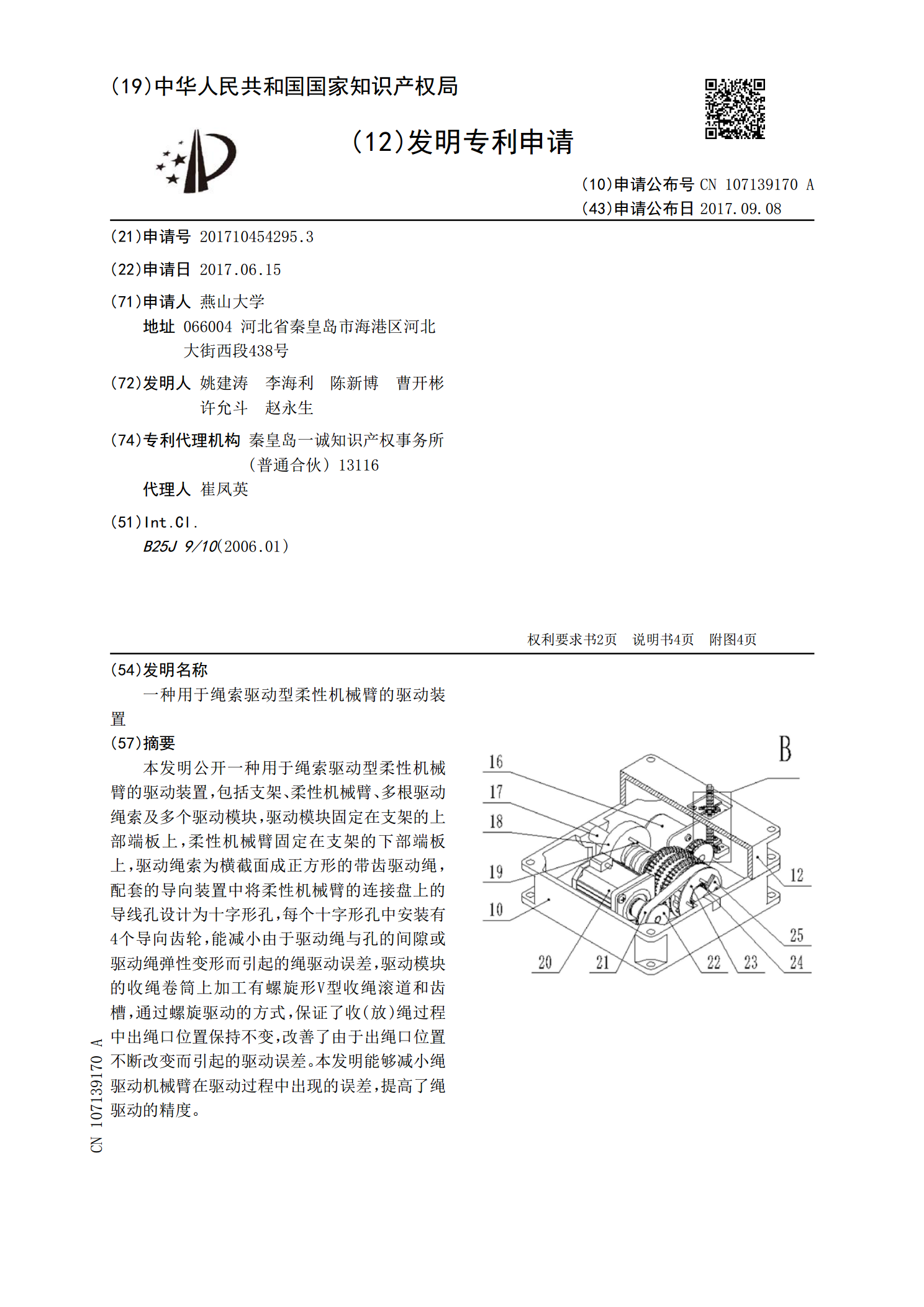
本发明公开一种用于绳索驱动型柔性机械臂的驱动装置,包括支架、柔性机械臂、多根驱动绳索及多个驱动模块,驱动模块固定在支架的上部端板上,柔性机械臂固定在支架的下部端板上,驱动绳索为横截面成正方形的带齿驱动绳,配套的导向装置中将柔性机械臂的连接盘上的导线孔设计为十字形孔,每个十字形孔中安装有4个导向齿轮,能减小由于驱动绳与孔的间隙或驱动绳弹性变形而引起的绳驱动误差,驱动模块的收绳卷筒上加工有螺旋形V型收绳滚道和齿槽,通过螺旋驱动的方式,保证了收(放)绳过程中出绳口位置保持不变,改善了由于出绳口位置不断改变而引起