
具有独立自固定牵拉线致动器的医疗装置控制手柄.pdf

努力****向丝


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

具有独立自固定牵拉线致动器的医疗装置控制手柄.pdf
本发明公开了医疗装置控制手柄,所述医疗装置控制手柄具有第一致动构件以用于在医疗装置的一种操纵中启动至少一条牵拉线(如果不是用于导管的双向挠曲的一对牵拉线),包括单向挠曲,并且具有第二致动构件以用于在医疗装置的另一种操纵中启动另外的牵拉线,其中第一致动构件和第二致动构件具有共同的旋转轴线而不旋转地连接。在一个实施例中,第一致动组件具有第一致动器、能够围绕轴线旋转的臂和第一轴。第一挠曲致动器和臂通过转轴旋转地连接,并且该臂具有至少一个滑轮,该至少一个滑轮与牵拉线接合。第二线致动组件具有第二致动器和第二轴,第二

具有凸轮致动的离合器机构的自固定医疗装置控制手柄.pdf
本发明公开了一种医疗装置控制手柄,所述医疗装置控制手柄具有第一致动组件和第二致动组件,其中每个组件均具有轴,该轴轴向对齐但是不与另一个轴旋转连接。第一致动组件包括第一致动构件和离合器机构,该离合器机构具有用于在使得第一致动构件自固定的过程中产生摩擦扭矩的摩擦盘。第一致动构件具有凸轮部分,所述凸轮部分能够施加平移运动和旋转运动,以用于随着第一致动构件的枢转而脱离离合器机构,从而允许第一轴的旋转来操纵医疗装置的结构,例如挠曲。第二致动组件包括第二致动构件和平移构件,平移构件响应于第二轴的旋转,以便操纵医疗装置

单向自锁装置及具有该单向自锁装置的线性致动器.pdf
本发明涉及一种单向自锁装置及具有该单向自锁装置的线性致动器,该单向自锁装置,包括第一阻尼部件和第二阻尼部件,第一阻尼部件和第二阻尼部件上具有啮合的单向斜齿,单向斜齿的其中一侧齿面为斜面,单向斜齿的该斜面用于在第一阻尼部件朝特定方向旋转时在第一阻尼部件和第二阻尼部件之间产生朝外的轴向力,该轴向力作用在第一阻尼部件和/或第二阻尼部件的外端部与外部摩擦件构成的摩擦副上,实现摩擦自锁。一种线性致动器,具有上述的单向自锁装置,单向自锁装置的第一阻尼部件与线性致动器的旋转部件驱动连接。本发明的有益效果是:本阻尼装置具

具有凸轮、随动件和控制器的致动器装置.pdf
一种致动器装置,具有马达驱动的凸轮、联接至输出构件且由凸轮驱动的随动件和用于控制马达的运行的控制器。凸轮具有第一凸轮表面、第二凸轮表面以及第一和第二凸轮表面之间的提升部分。控制器被配置为随着随动件相对于凸轮沿提升部分朝向第二凸轮表面移动时识别提升部分上的预定点。控制器采用输出构件沿输出构件轴线的位置作为凸轮绕凸轮轴线的旋转位置的函数的形式的变化率识别预定点。控制器基于预定点控制马达的运行,以便将随动件定位在第二凸轮表面上。
自卸卡车的液压致动器控制装置.pdf
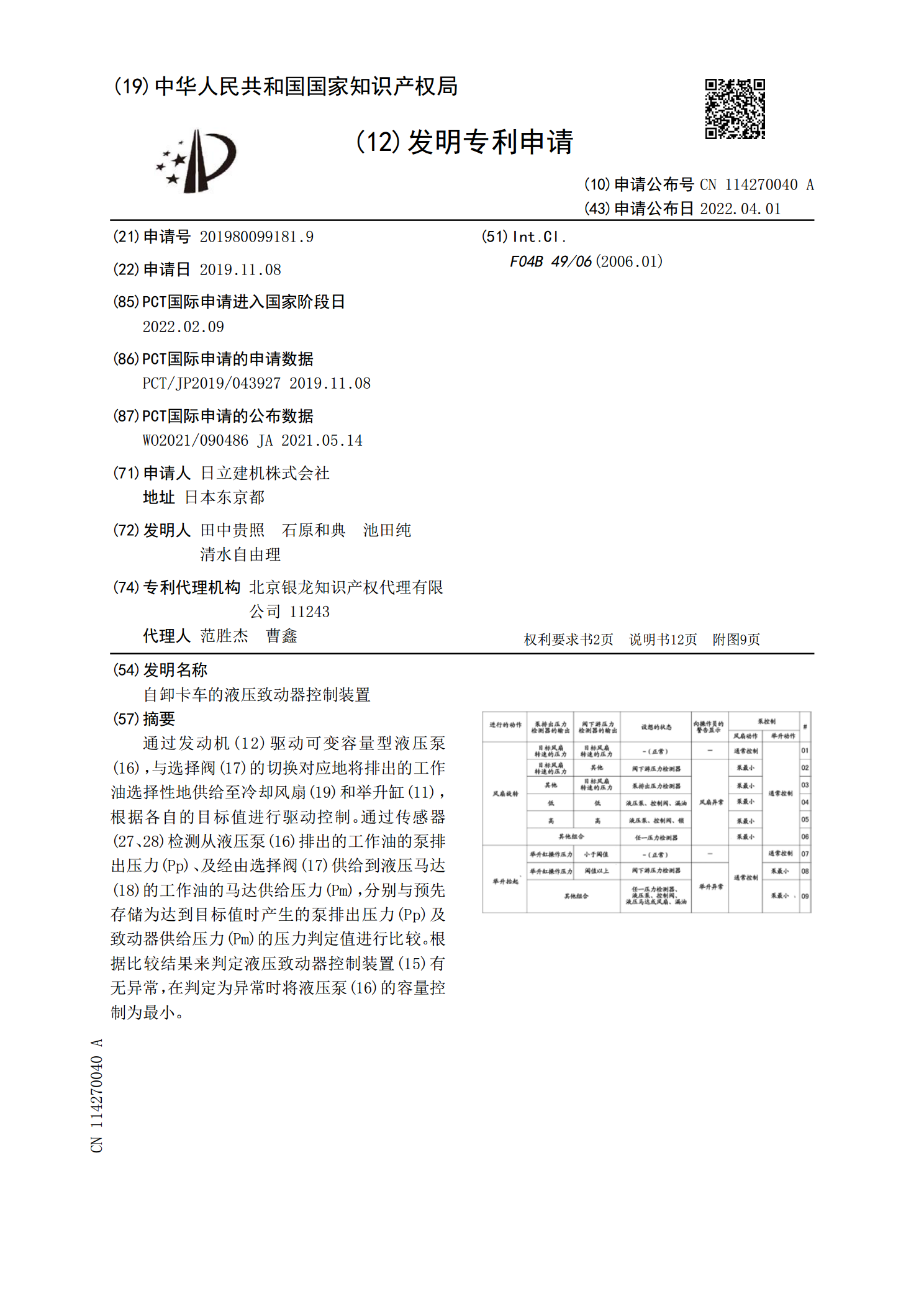
通过发动机(12)驱动可变容量型液压泵(16),与选择阀(17)的切换对应地将排出的工作油选择性地供给至冷却风扇(19)和举升缸(11),根据各自的目标值进行驱动控制。通过传感器(27、28)检测从液压泵(16)排出的工作油的泵排出压力(Pp)、及经由选择阀(17)供给到液压马达(18)的工作油的马达供给压力(Pm),分别与预先存储为达到目标值时产生的泵排出压力(Pp)及致动器供给压力(Pm)的压力判定值进行比较。根据比较结果来判定液压致动器控制装置(15)有无异常,在判定为异常时将液压泵(16)的容量控