
结构光三维测量系统标定方法、巡检数据处理方法.pdf

波峻****99

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
结构光三维测量系统标定方法、巡检数据处理方法.pdf
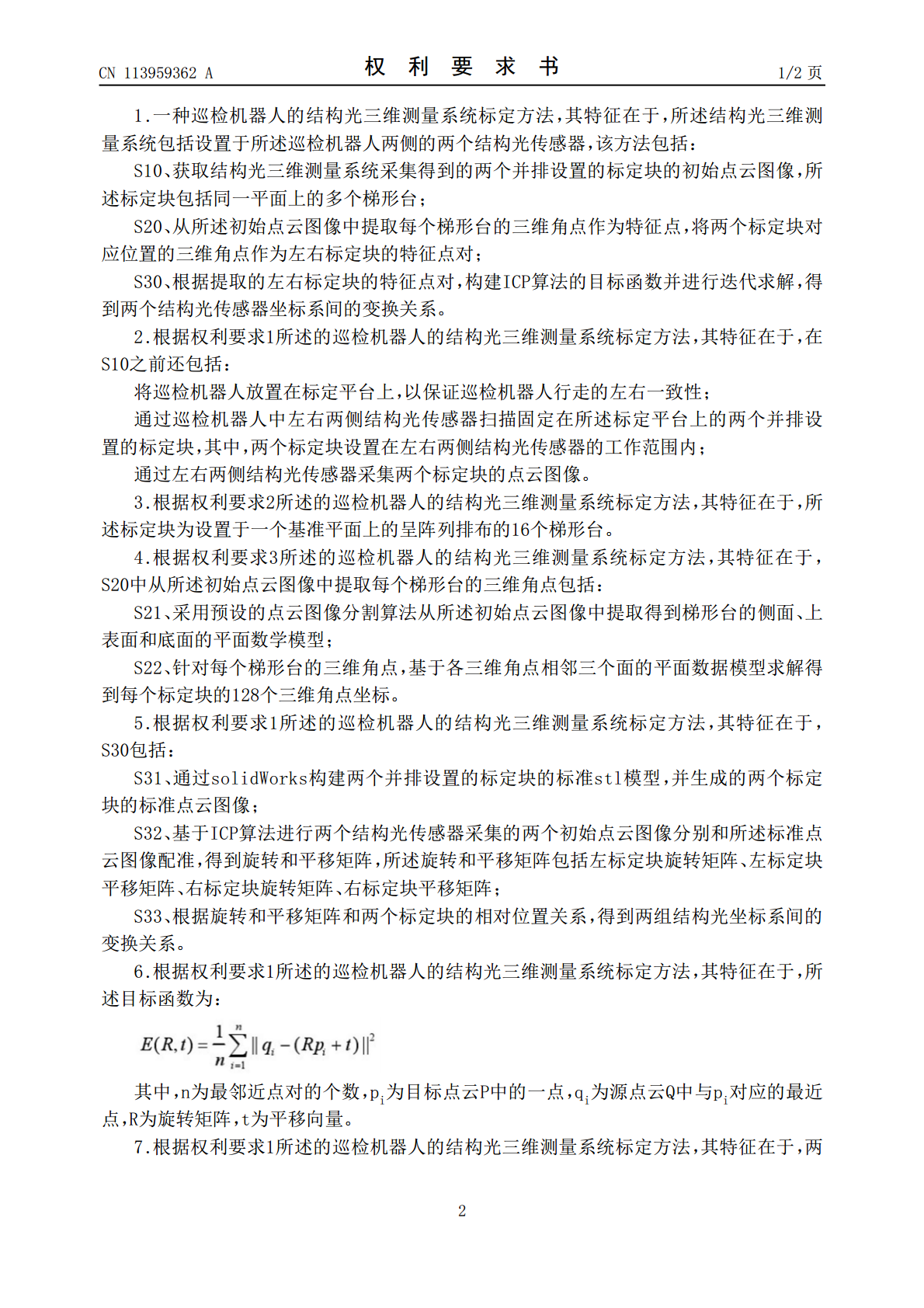
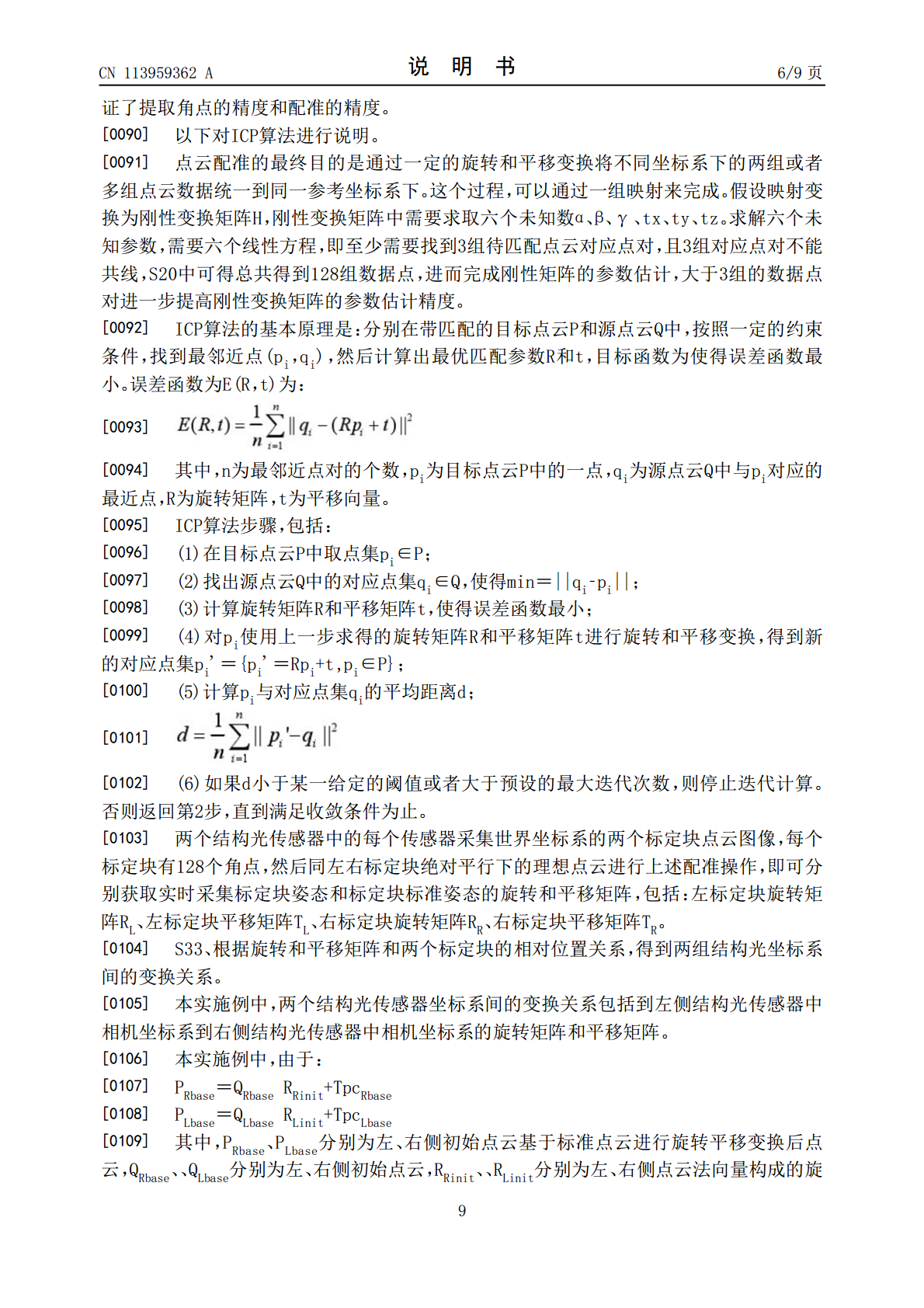
本申请属于轨道检测技术领域,具体涉及一种巡检机器人的结构光三维测量系统标定方法,结构光三维测量系统包括设置于巡检机器人两侧的两个结构光传感器;该方法包括:S10、获取结构光三维测量系统采集得到的两个并排设置的标定块的初始点云图像,标定块包括同一平面上的多个梯形台;S20、从初始点云图像中提取每个梯形台的三维角点作为特征点,将两个标定块相应位置的三维角点作为左右标定块的特征点对;S30、根据提取的左右标定块的特征点对,构建ICP算法的目标函数并进行迭代求解,得到两个结构光传感器坐标系间的变换关系。通过本申请
一种单目旋转结构光三维测量系统标定方法.pdf
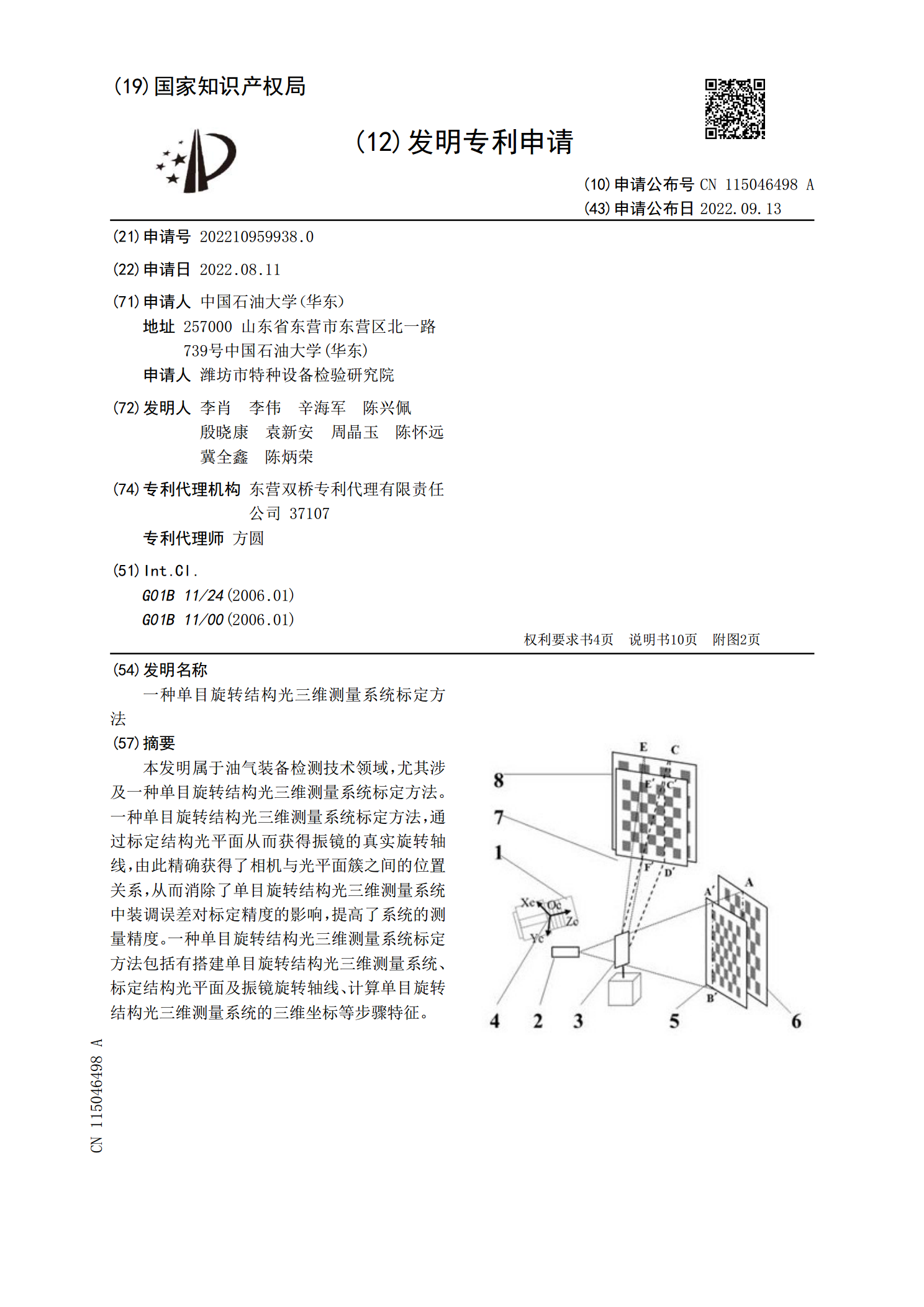
本发明属于油气装备检测技术领域,尤其涉及一种单目旋转结构光三维测量系统标定方法。一种单目旋转结构光三维测量系统标定方法,通过标定结构光平面从而获得振镜的真实旋转轴线,由此精确获得了相机与光平面簇之间的位置关系,从而消除了单目旋转结构光三维测量系统中装调误差对标定精度的影响,提高了系统的测量精度。一种单目旋转结构光三维测量系统标定方法包括有搭建单目旋转结构光三维测量系统、标定结构光平面及振镜旋转轴线、计算单目旋转结构光三维测量系统的三维坐标等步骤特征。
一种单目三维高速测量方法、光路系统及其标定方法.pdf
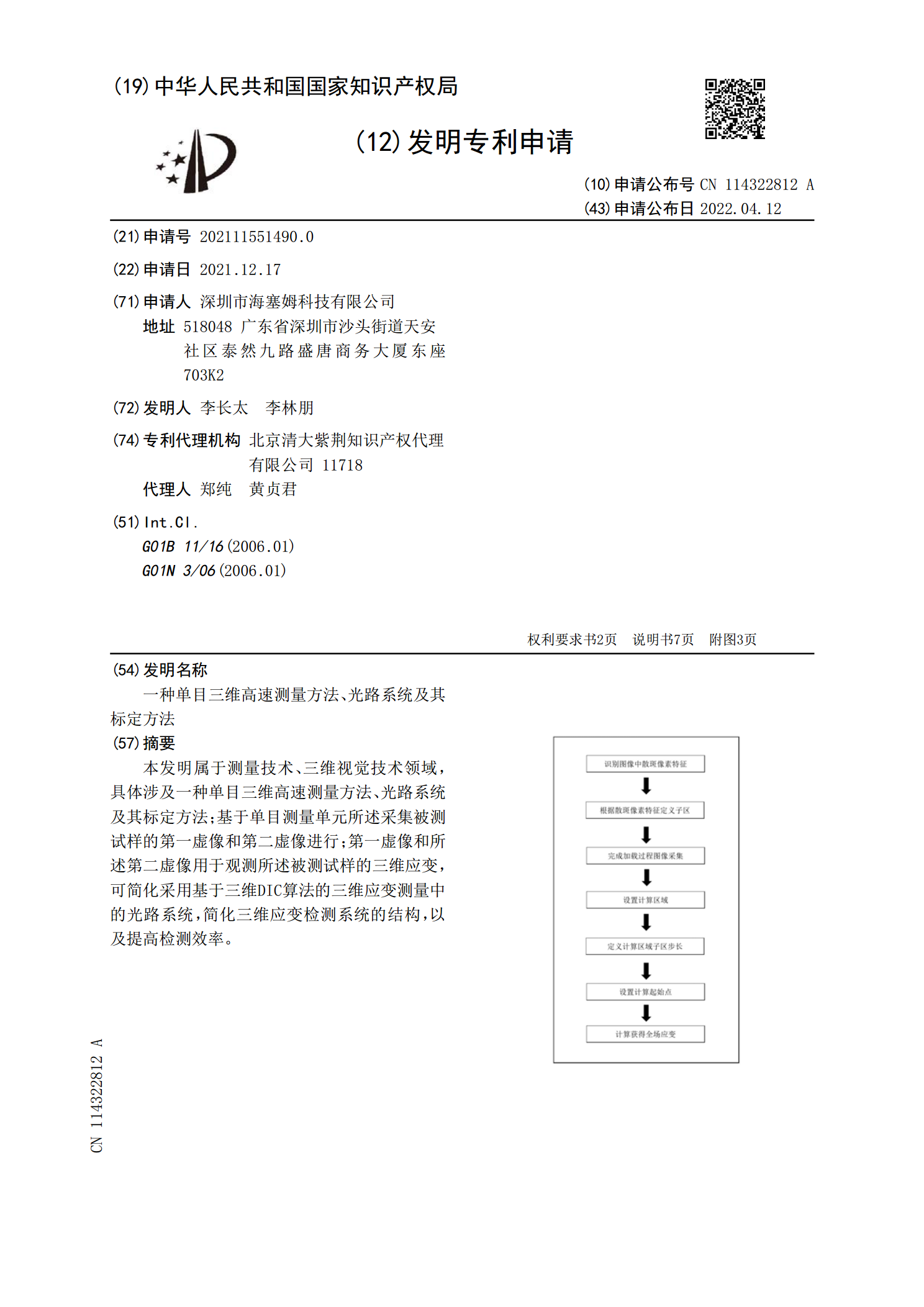
本发明属于测量技术、三维视觉技术领域,具体涉及一种单目三维高速测量方法、光路系统及其标定方法;基于单目测量单元所述采集被测试样的第一虚像和第二虚像进行;第一虚像和所述第二虚像用于观测所述被测试样的三维应变,可简化采用基于三维DIC算法的三维应变测量中的光路系统,简化三维应变检测系统的结构,以及提高检测效率。
结构光三维测量系统的投影成像镜头组调焦方法.pdf
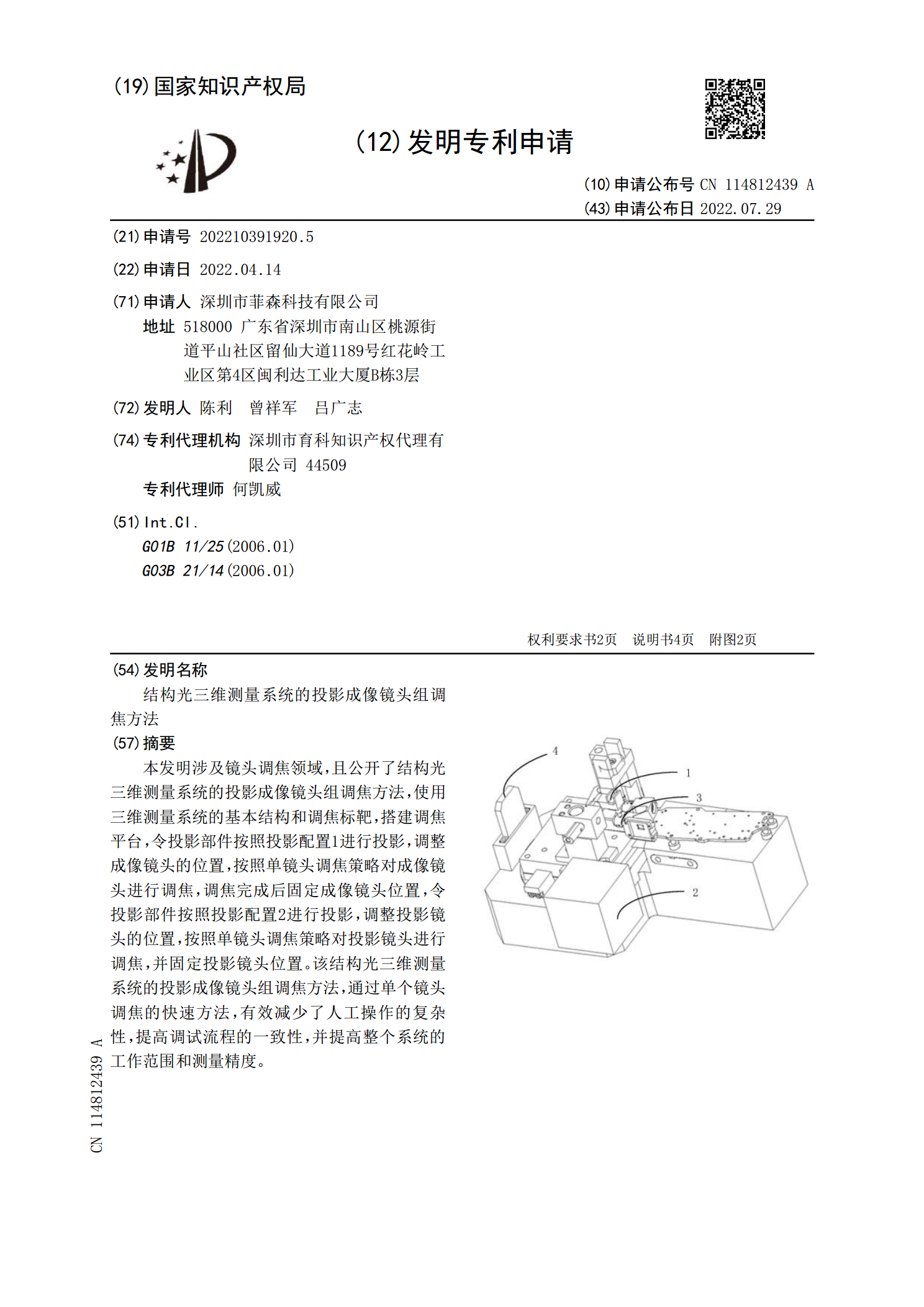
本发明涉及镜头调焦领域,且公开了结构光三维测量系统的投影成像镜头组调焦方法,使用三维测量系统的基本结构和调焦标靶,搭建调焦平台,令投影部件按照投影配置1进行投影,调整成像镜头的位置,按照单镜头调焦策略对成像镜头进行调焦,调焦完成后固定成像镜头位置,令投影部件按照投影配置2进行投影,调整投影镜头的位置,按照单镜头调焦策略对投影镜头进行调焦,并固定投影镜头位置。该结构光三维测量系统的投影成像镜头组调焦方法,通过单个镜头调焦的快速方法,有效减少了人工操作的复杂性,提高调试流程的一致性,并提高整个系统的工作范围和

基于结构光场的三维矢量速度测量系统及测量方法.pdf
本发明的基于结构光场的三维矢量速度测量系统及测量方法涉及激光多维测速技术领域,目的是为了克服现有技术中对三维矢量速度的测量较为复杂且精度不高,以及实时性较差的问题,系统中的激光器发射出射激光通过空间光调制器进行多阶角动量复合调制生成调制信号,然后再照射待探测的运动目标生成回波信号;接收光学系统调节回波信号后使其穿过单向反射玻璃的背面加载至阵列探测器;且使得本振信号对准回波结构光场中心的径向多普勒效应光斑;阵列探测器探测四个横向多普勒效应光斑区域、以及径向多普勒效应光斑与本振信号的叠加区域,得到对应的每个时