
一种往复运动转换为旋转运动的装置.pdf

努力****晓骞


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种往复运动转换为旋转运动的装置.pdf
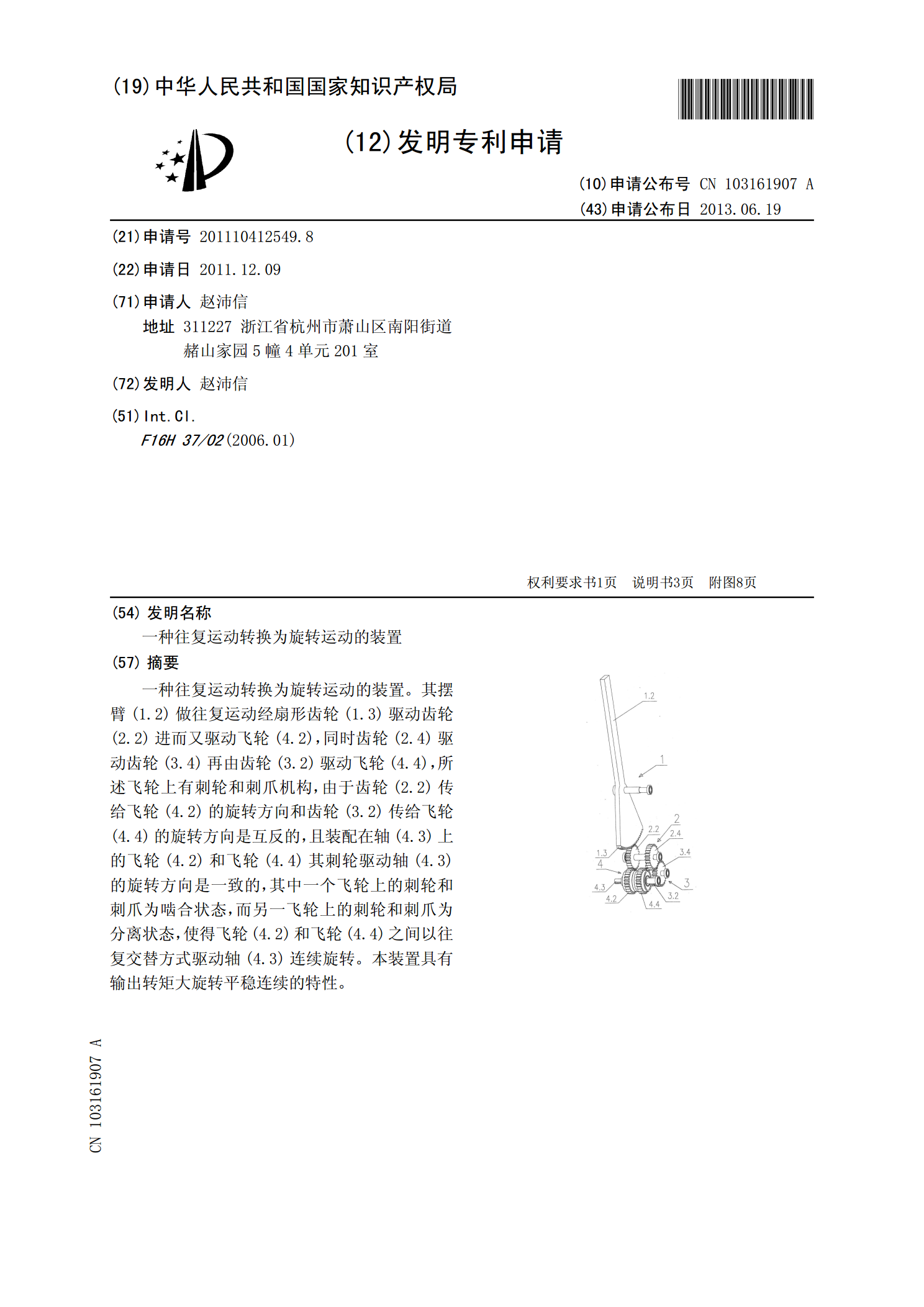
一种往复运动转换为旋转运动的装置。其摆臂(1.2)做往复运动经扇形齿轮(1.3)驱动齿轮(2.2)进而又驱动飞轮(4.2),同时齿轮(2.4)驱动齿轮(3.4)再由齿轮(3.2)驱动飞轮(4.4),所述飞轮上有刺轮和刺爪机构,由于齿轮(2.2)传给飞轮(4.2)的旋转方向和齿轮(3.2)传给飞轮(4.4)的旋转方向是互反的,且装配在轴(4.3)上的飞轮(4.2)和飞轮(4.4)其刺轮驱动轴(4.3)的旋转方向是一致的,其中一个飞轮上的刺轮和刺爪为啮合状态,而另一飞轮上的刺轮和刺爪为分离状态,使得飞轮(4.

一种往复运动机构及将旋转运动转换为往复运动的方法.pdf
本发明公开了一种用于将旋转运动转换为往复运动的往复运动机构及方法,往复运动机构包括两个齿轮、滚动体和导向装置,其中两个齿轮的齿廓曲线为平滑曲线,所述滚动体位于该两个齿轮的齿面之间并与该两个齿轮的齿面间隙或过盈配合,而且该滚动体的中心与该两个齿轮的中心位于同一直线L上,所述导向装置与该滚动体相连,该导向装置的导向方向与滚动体的往复运动方向一致。本发明通过两个旋转齿轮的齿面推动滚动体往复运动,从而带动工作部件往复运动,最终实现将低速旋转运动转换为高频率往复运动,从而提高了旋转部件的寿命;而且,滚动体与齿轮的齿

往复运动气液压旋转装置.pdf
本发明技术名称为往复运动气液压旋转装置,涉及机械压力领域一种往复运动旋转装置,就是充分利用振动形式的机械运动产生压力推动旋转做工。主要技术方案是轴头安装活塞在一头密闭,另外一头密封轴可以往复运动的管中,分别安装合并连接单向进(出)阀门,接入汽、液压泵进(出)口,形成闭合,当活塞往复运动产生压力带动汽、液压泵旋转,还可制作成减震器两用。主要用途是主要用途是在机械振动、机动车、飞机、火车运行和轮船利用海水的波浪振动发电减震器两用。往复运动皆有能量,便于推广使用。

直线往复运动变换为连续圆周运动的装置.pdf
一种直线往复运动变换为连续圆周运动的装置,一往复运动的双面齿条两侧或者两相向往复运动的单面齿条分别与第一齿轮和第二齿轮啮合,该第一齿轮和第二齿轮分别通过第一传动轴和第二传动轴与第一飞轮离合器和第二飞轮离合器固定连接,该第一飞轮离合器的外缘齿轮和第二飞轮离合器的外缘齿轮同时与主轴齿轮啮合。本发明第一解决了现有技术中直线往复运动转换成圆周运动中压力角使得动能大量损耗的问题,即解决曲轴30%的功率损耗问题;第二改用传动齿轮与飞轮离合器为同心轴,使得制造更加方便,造价大大降低。本发明设计的飞轮离合器为无磨损高强度

一种旋转运动和往复运动转换装置.pdf
一种旋转运动和往复运动转换装置(20),其包括活塞(72、74、76、78),活塞杆(62、64)的一端与活塞(72、74、76、78)相连,壳体(25)安装在底座(11)上,在壳体(25)的侧壁(28)上设有轴承座(5),传动轴(6)安装在轴承座(5)中,在传动轴(6)上设有传动轮(15、17)。在传动轮(15、17)的边缘部分设有轴向伸出的柱销(7、71),在传动轮(15、17)的附近安装有可相对于传动轴(6)转动的第一齿轮(10)和第二齿轮(14),第一齿轮(10)与第一齿条(2)相互啮合,第二齿轮