
一种获取车辆三维轮廓的方法、装置及系统.pdf

努力****晓骞


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种获取车辆三维轮廓的方法、装置及系统.pdf
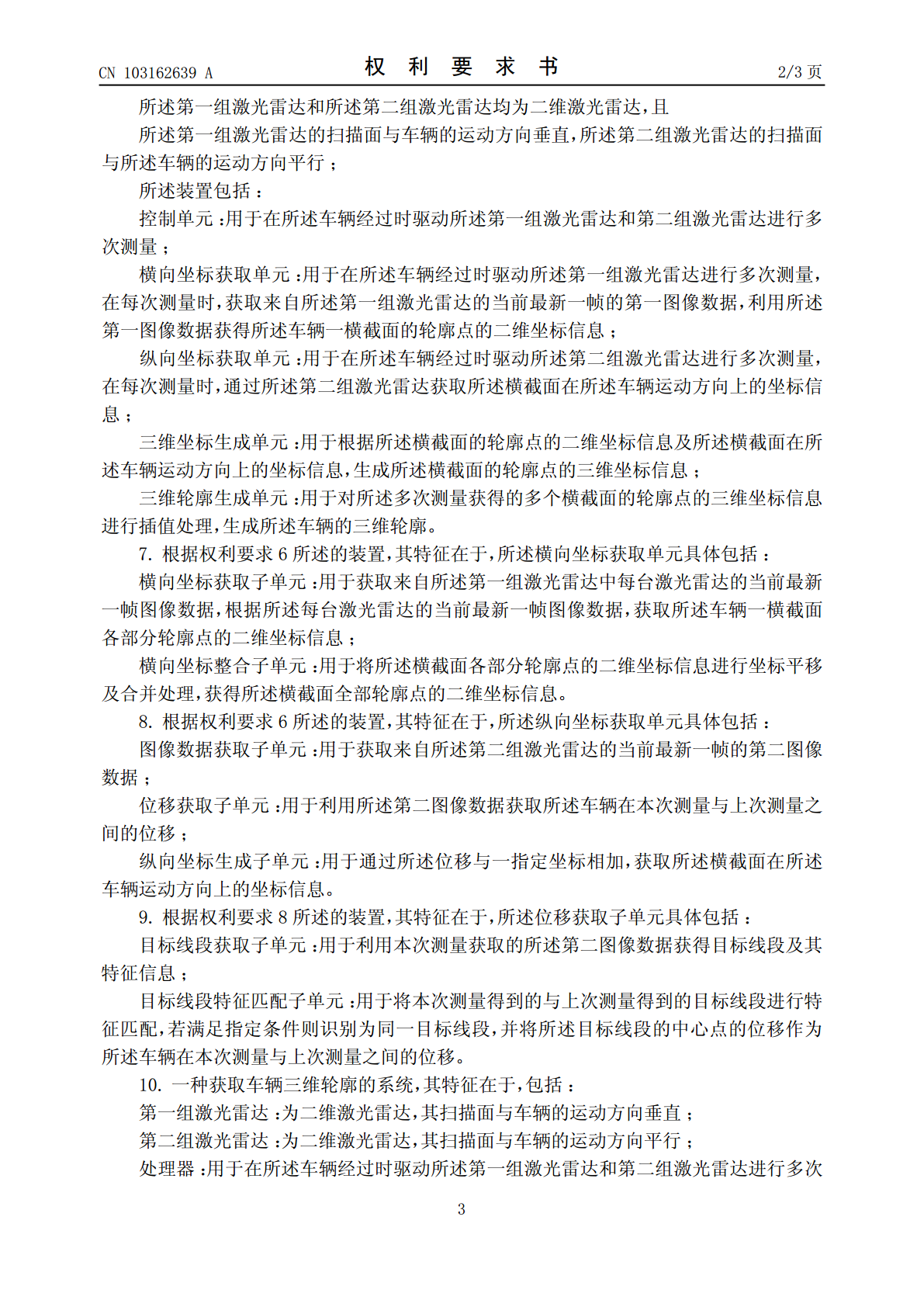
本发明实施例公开了一种获取车辆三维轮廓的方法、装置及系统。在所述方法中,第一组激光雷达的扫描面与车辆运动方向垂直,第二组激光雷达则平行。在车辆通过时进行多次测量,在每次测量中获取第一组激光雷达的当前最新一帧的第一图像数据并获得车辆一横截面的轮廓点的二维坐标信息,获取来自第二组激光雷达的当前最新一帧的第二图像数据并获得该横截面在车辆运动方向上的坐标信息,然后根据二维坐标信息及横截面在车辆运动方向上的坐标信息,获得横截面的轮廓点的三维坐标信息,最后对多次测量获得的多个横截面的轮廓点的三维坐标信息进行插值处理,
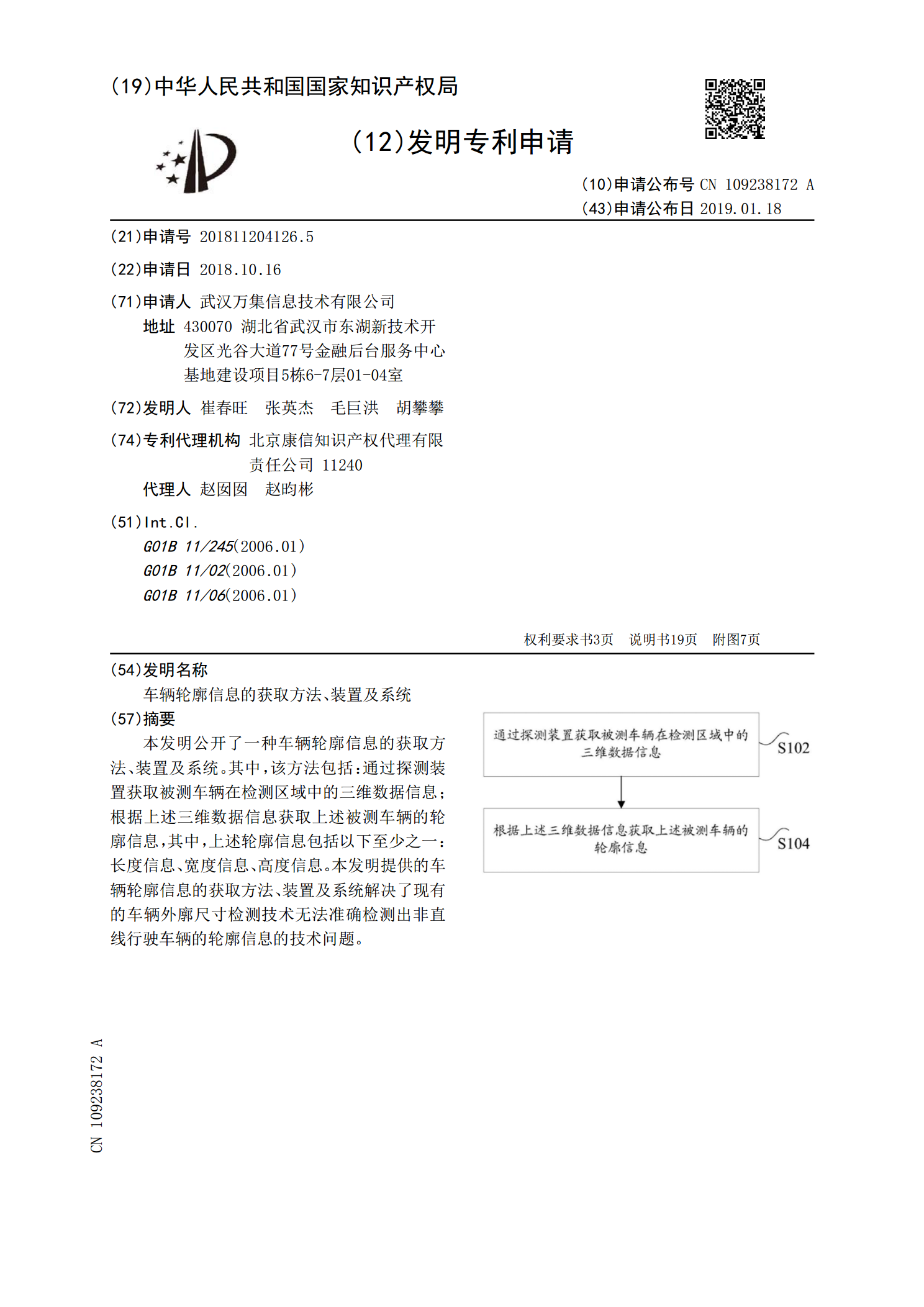
车辆轮廓信息的获取方法、装置及系统.pdf
本发明公开了一种车辆轮廓信息的获取方法、装置及系统。其中,该方法包括:通过探测装置获取被测车辆在检测区域中的三维数据信息;根据上述三维数据信息获取上述被测车辆的轮廓信息,其中,上述轮廓信息包括以下至少之一:长度信息、宽度信息、高度信息。本发明提供的车辆轮廓信息的获取方法、装置及系统解决了现有的车辆外廓尺寸检测技术无法准确检测出非直线行驶车辆的轮廓信息的技术问题。

目标轮廓的获取方法及装置.pdf
本发明公开了一种目标轮廓的获取方法及装置。其中,该方法包括:向目标发射雷达波;获取雷达波在目标上的雷达回波,其中,雷达回波包括不同探测帧的多个反射点;对多个反射点进行叠加,得到目标对应的点云图;根据点云图获取目标的轮廓信息,其中,轮廓信息包括:目标的高度。本发明解决了相关技术中利用雷达对目标进行轮廓识别时不能检测目标的高度的技术问题。
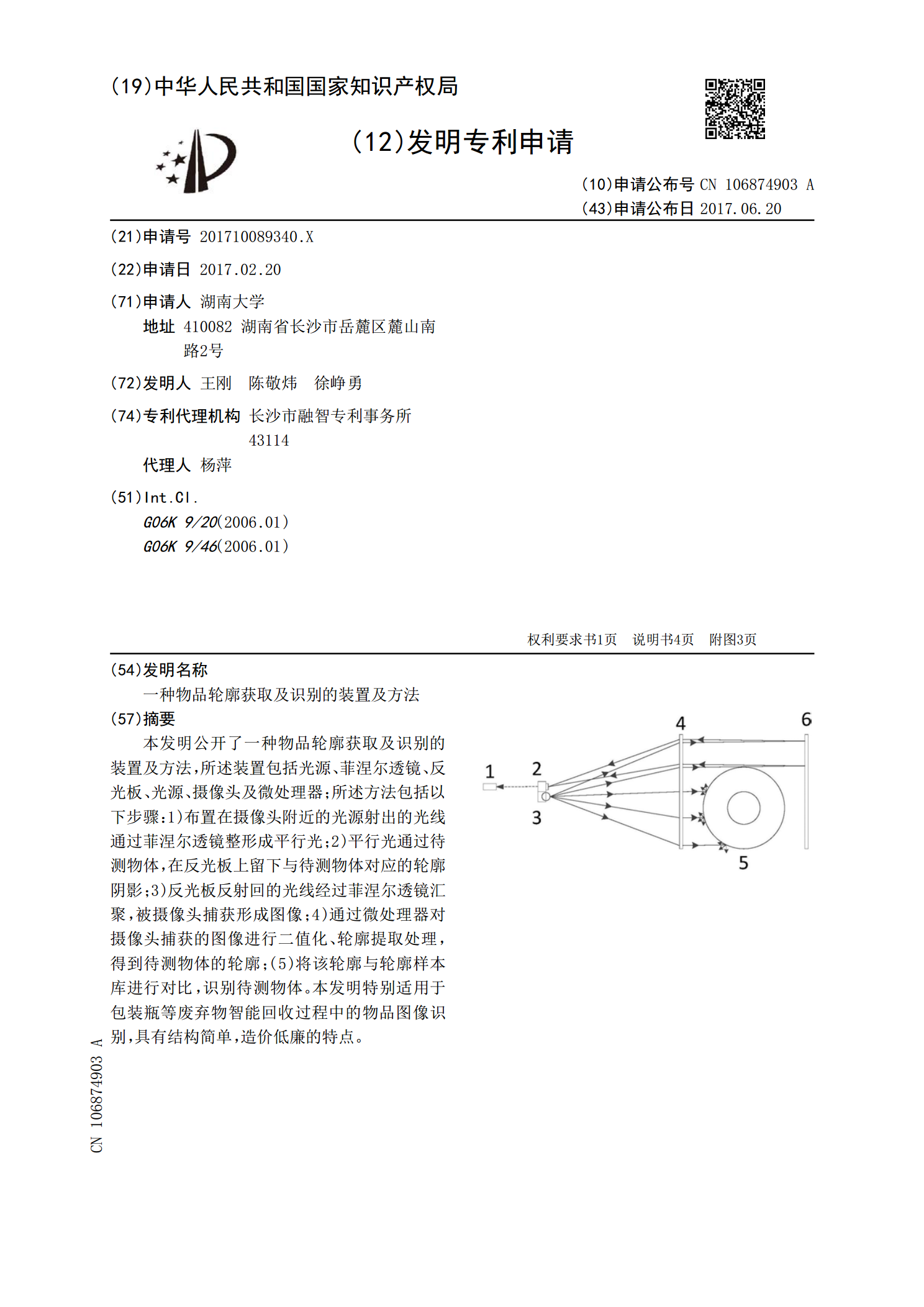
一种物品轮廓获取及识别的装置及方法.pdf
本发明公开了一种物品轮廓获取及识别的装置及方法,所述装置包括光源、菲涅尔透镜、反光板、光源、摄像头及微处理器;所述方法包括以下步骤:1)布置在摄像头附近的光源射出的光线通过菲涅尔透镜整形成平行光;2)平行光通过待测物体,在反光板上留下与待测物体对应的轮廓阴影;3)反光板反射回的光线经过菲涅尔透镜汇聚,被摄像头捕获形成图像;4)通过微处理器对摄像头捕获的图像进行二值化、轮廓提取处理,得到待测物体的轮廓;(5)将该轮廓与轮廓样本库进行对比,识别待测物体。本发明特别适用于包装瓶等废弃物智能回收过程中的物品图像识

一种车辆轮廓测量装置及方法.pdf
本发明公开了一种车辆轮廓测量装置及方法,包括水平排列的对射型的长度光栅L,在距离长度光栅L前端r的位置设置有竖向排列的对射型的高度光栅H,在高度光栅H的下端与长度光栅L的交点之间设置有水平排列的对射型的宽度光栅W;长度光栅L、高度光栅H和宽度光栅W在三维空间相互垂直;在距离长度光栅L前端n的位置设置有竖向排列的定位光栅F,n大于r,采用对射型的光栅尺三维测量车辆的尺寸,能够在车辆运行中测出车辆轮廓,具有结构简单,速度快,精度高,安装方便,造价低等优点。