
一种QR码自动定位及定向方法.pdf

阳炎****找我

1/10

2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种QR码自动定位及定向方法.pdf
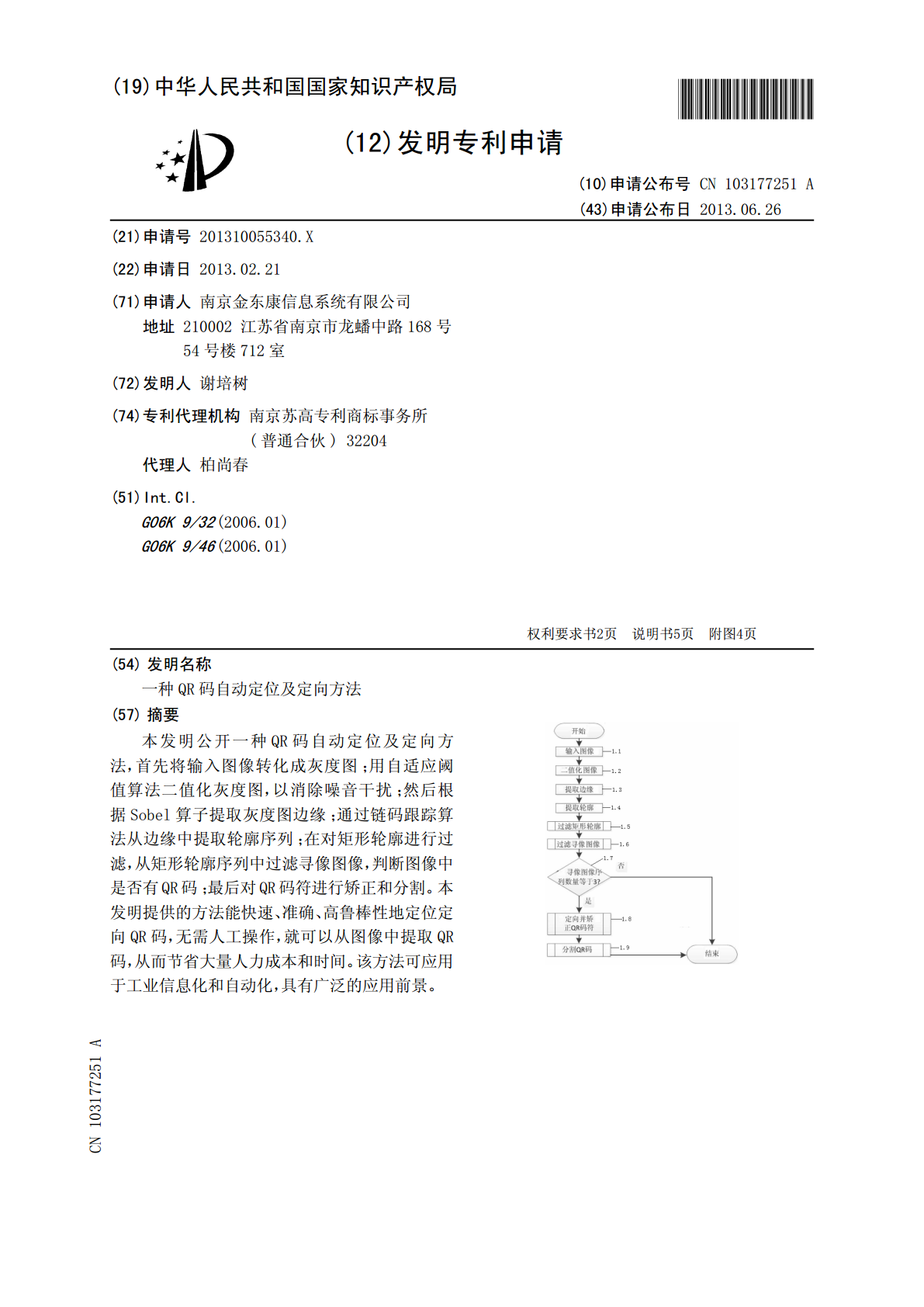
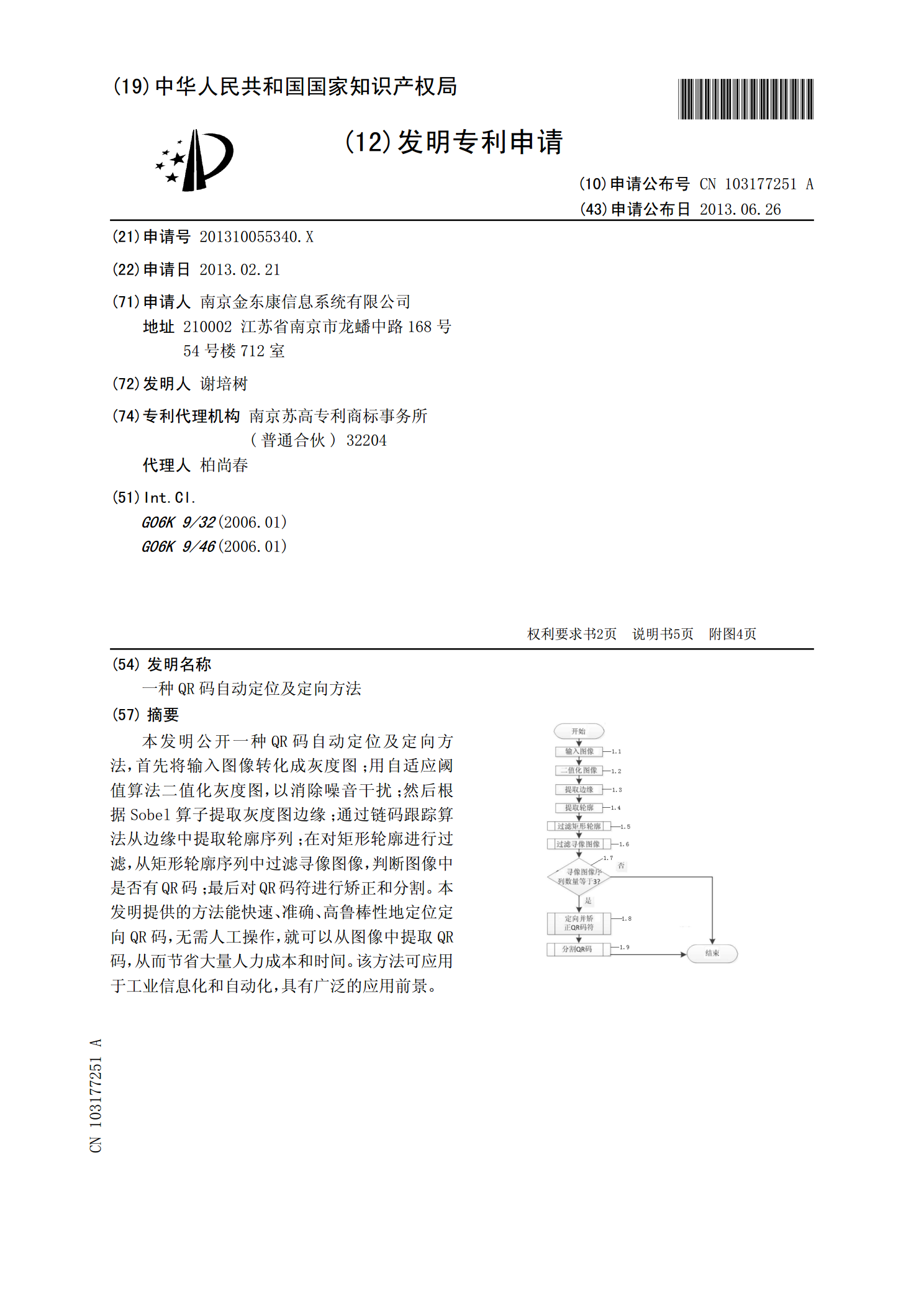
本发明公开一种QR码自动定位及定向方法,首先将输入图像转化成灰度图;用自适应阈值算法二值化灰度图,以消除噪音干扰;然后根据Sobel算子提取灰度图边缘;通过链码跟踪算法从边缘中提取轮廓序列;在对矩形轮廓进行过滤,从矩形轮廓序列中过滤寻像图像,判断图像中是否有QR码;最后对QR码符进行矫正和分割。本发明提供的方法能快速、准确、高鲁棒性地定位定向QR码,无需人工操作,就可以从图像中提取QR码,从而节省大量人力成本和时间。该方法可应用于工业信息化和自动化,具有广泛的应用前景。

一种QR码定位及识别方法.pdf
本发明公开了一种QR码定位及识别方法。定位方法包括以下步骤:(1)获取待检测QR码的图像并二值化;(2)根据连通域提取、矩形度分析以及孤岛特征判断,提取QR码三个定位图形坐标:采用连通域分析,提取黑色像素的连通域;获取连通区域的矩形度,保留矩形度大于筛选阈值的黑色像素连通域作为矩形连通域;保留具有黑色像素点孤岛特征的矩形连通域,作为定位标,得到定位图形。识别方法包括以下步骤:S1、按照所述定位方法进行定位;S2、检测QR码边缘;S3、计算四条边的交点作为畸变控制点;S4、采用双线性差值算法,几何矫正QR码
一种复杂环境下的QR码检测定位方法.pdf
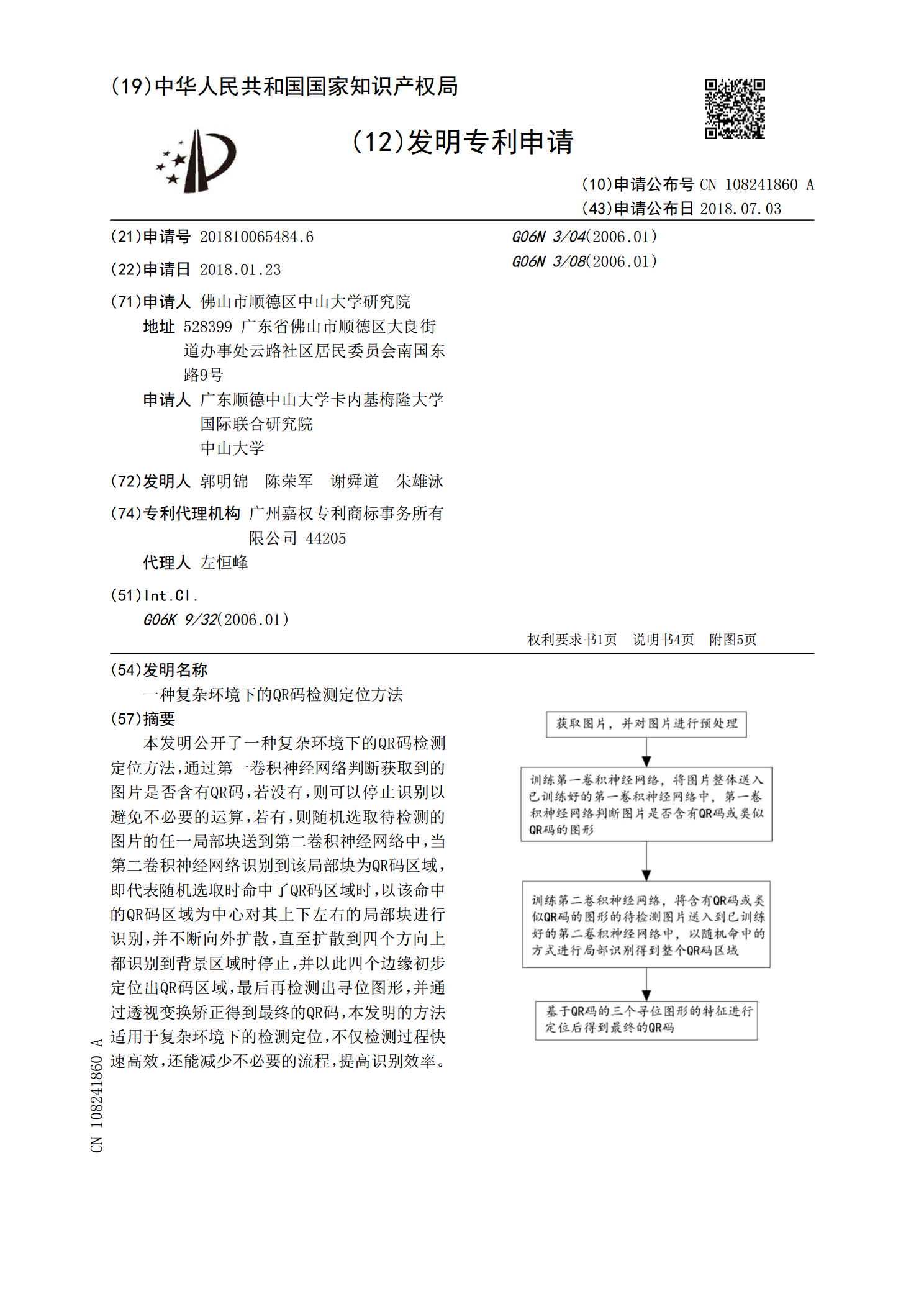
本发明公开了一种复杂环境下的QR码检测定位方法,通过第一卷积神经网络判断获取到的图片是否含有QR码,若没有,则可以停止识别以避免不必要的运算,若有,则随机选取待检测的图片的任一局部块送到第二卷积神经网络中,当第二卷积神经网络识别到该局部块为QR码区域,即代表随机选取时命中了QR码区域时,以该命中的QR码区域为中心对其上下左右的局部块进行识别,并不断向外扩散,直至扩散到四个方向上都识别到背景区域时停止,并以此四个边缘初步定位出QR码区域,最后再检测出寻位图形,并通过透视变换矫正得到最终的QR码,本发明的方法

基于亚像素的QR码定位方法研究.docx
基于亚像素的QR码定位方法研究基于亚像素的QR码定位方法研究摘要:QR码是一种常用的二维码编码方式,广泛应用于商品标识、支付、电子票务等领域。然而,由于光照变化、摄像头畸变等因素的影响,QR码的识别和定位一直是一个挑战。本论文基于亚像素的QR码定位方法进行研究,通过对亚像素定位的理论和方法进行归纳总结,并通过实验验证,提出了一种有效的基于亚像素的QR码定位方法。1.引言QR码作为二维码的一种,具有大容量、高可靠性、小占用空间等优点。目前,QR码已广泛应用于商品标识、支付、电子票务等领域。然而,由于光照变化

一种QR码快速定位检测算法.pdf
本发明提供一种QR码快速定位检测算法,该方法对图像进行二值化,提取二值图形,然后采用Canny算法提取二值图形的边缘图形,在边缘图形中搜索轮廓图形用于定位,并获取轮廓的嵌套关系,之后根据轮廓嵌套信息,判断有三个轮廓嵌套的图形为二维码的位置探测图形,若检测到的位置探测图形为三个,则计算其最外围轮廓的中心距,作为QR码的定位点,最后提取出QR码;该方法利用QR码轮廓进行定位,而后根据轮廓顶点的关系确定QR码的四个顶点,最后采用透视变换的方法对QR码进行了提取;该方法原理易于理解,准确性高,识别速度快,可以很好