
基于调频连续波原理的三维成像激光雷达系统.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于调频连续波原理的三维成像激光雷达系统.docx
基于调频连续波原理的三维成像激光雷达系统一、引言随着激光雷达技术的快速发展,三维成像激光雷达系统在地图制图、自动驾驶、机器人导航等领域中得到了广泛的应用。在激光雷达中,通过发射激光束并测量其返回时间,可以获取目标物体的距离和位置信息,从而实现三维成像。不同的激光雷达技术有着各自的优势和应用场景。其中,基于调频连续波原理的三维成像激光雷达系统具有高分辨率、高抗干扰性、低功耗等优点,在自动驾驶、导航、机器人等领域中具有广泛的应用前景。本文将会讨论基于调频连续波原理的三维成像激光雷达系统的工作原理、硬件组成以及

一种基于调频连续波超声成像系统及检测方法.pdf
本发明公开了一种基于调频连续波超声成像系统与检测方法,其包括调频连续波产生模块、超声波发送与回波接收模块、信号处理模块及显示模块,所述调频连续波产生模块与所述超声波发送与回波接收模块电连接,所述调频连续波产生模块用于产生一个在时域上频率与时间成线性关系的频率信号,所述超声波发送与回波接收模块用于发送所述调频连续波产生模块产生的调频连续波并接收反馈信号,所述超声波发送与回波接收模块输出端与所述信号处理模块输入端电连接,所述信号处理模块对接收的反馈信号进行处理后在显示模块进行成像。本发明具有无距离盲区、高分辨
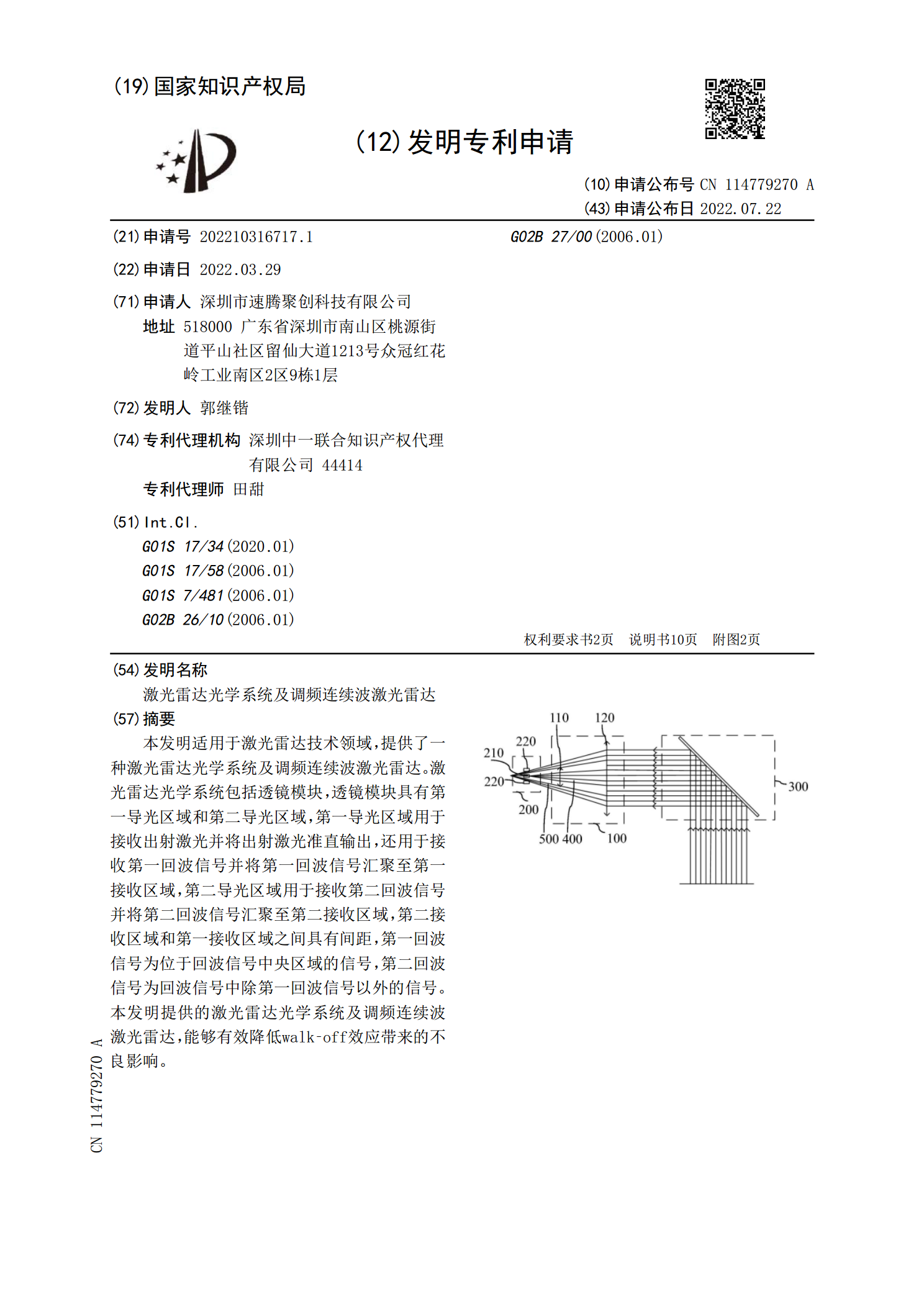
激光雷达光学系统及调频连续波激光雷达.pdf
本发明适用于激光雷达技术领域,提供了一种激光雷达光学系统及调频连续波激光雷达。激光雷达光学系统包括透镜模块,透镜模块具有第一导光区域和第二导光区域,第一导光区域用于接收出射激光并将出射激光准直输出,还用于接收第一回波信号并将第一回波信号汇聚至第一接收区域,第二导光区域用于接收第二回波信号并将第二回波信号汇聚至第二接收区域,第二接收区域和第一接收区域之间具有间距,第一回波信号为位于回波信号中央区域的信号,第二回波信号为回波信号中除第一回波信号以外的信号。本发明提供的激光雷达光学系统及调频连续波激光雷达,能够

调频连续波雷达自旋目标干涉三维成像方法.docx
调频连续波雷达自旋目标干涉三维成像方法调频连续波雷达(FMCW)是一种常用的雷达工作模式,它能够提供高分辨率的目标信息。自旋目标通常指的是旋转或自旋的目标,例如飞机、车辆和人体。目标干涉三维成像是通过分析目标返回的多个时刻的信号,从而获得目标的三维空间位置和形状信息的方法。本文将介绍调频连续波雷达自旋目标干涉三维成像方法的基本原理与实现步骤,并讨论其在实际应用中存在的挑战和改进方法。一、调频连续波雷达自旋目标干涉三维成像方法的基本原理1.调频连续波雷达工作原理调频连续波雷达是一种连续调频信号作为发射信号的
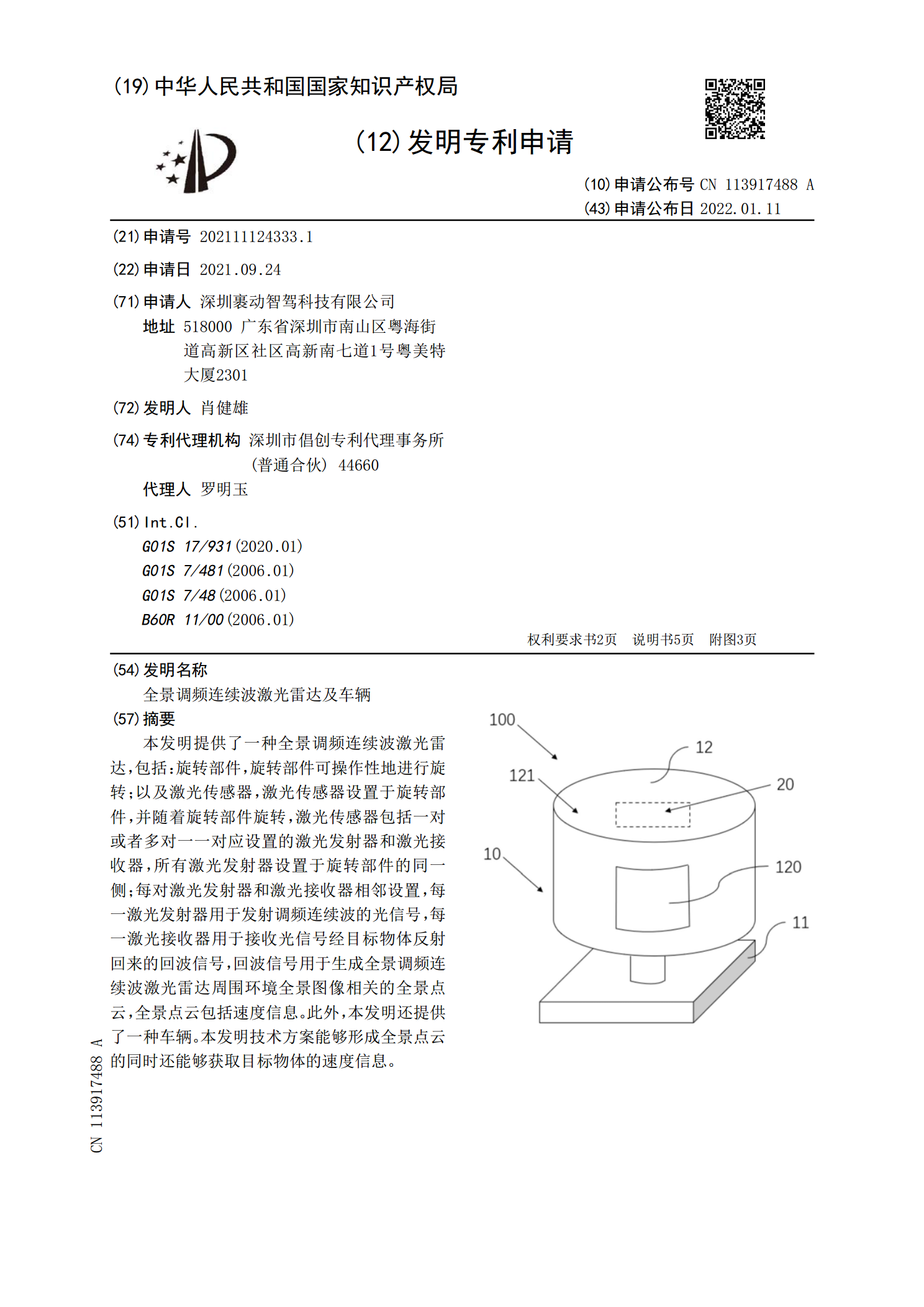
全景调频连续波激光雷达及车辆.pdf
本发明提供了一种全景调频连续波激光雷达,包括:旋转部件,旋转部件可操作性地进行旋转;以及激光传感器,激光传感器设置于旋转部件,并随着旋转部件旋转,激光传感器包括一对或者多对一一对应设置的激光发射器和激光接收器,所有激光发射器设置于旋转部件的同一侧;每对激光发射器和激光接收器相邻设置,每一激光发射器用于发射调频连续波的光信号,每一激光接收器用于接收光信号经目标物体反射回来的回波信号,回波信号用于生成全景调频连续波激光雷达周围环境全景图像相关的全景点云,全景点云包括速度信息。此外,本发明还提供了一种车辆。本发