
二自由度球面定点并联五杆机构的运动学分析.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

二自由度球面定点并联五杆机构的运动学分析.docx
二自由度球面定点并联五杆机构的运动学分析二自由度球面定点并联五杆机构是一种多杆机构系统,在机械领域中被广泛应用。它由一个固定球面、五个短柱(其中两个短柱被设为主动杆件,其余三个短柱被设为被动杆件)和五个球头组成。它的运动学分析是研究它的运动学性能和特点的重要方面。本文将以二自由度球面定点并联五杆机构为例,介绍它的运动学分析。1.球面定点并联五杆机构的运动学性质球面定点并联五杆机构的运动学性质主要取决于其五个短柱的长度和球头的位置。这些性质包括运动自由度、正逆运动学、机构的位形和可达性等方面。该机构是一个具

二自由度球面并联换档机构运动学分析及仿真.docx
二自由度球面并联换档机构运动学分析及仿真一、引言球面并联机构是一种常用于机械装置中的运动机构,其具有较好的运动平稳性和精度。换档机构是一种可以改变机械装置输出传动比的机构,常见于汽车等设备中。本文旨在分析二自由度球面并联换档机构的运动学特性,并进行相关仿真研究,以期为机械装置的设计与优化提供参考。二、二自由度球面并联换档机构的运动学分析球面并联机构是指由多个链节构成的机构,其中一个链节的轴线为球面上的一点,其他链节的轴线上同样满足球面上的点。球面并联机构的主要特点是结构紧凑、运动平稳。在二自由度球面并联换

3-RRP球面并联机构的运动学分析.docx
3-RRP球面并联机构的运动学分析标题:3-RRP球面并联机构的运动学分析摘要:球面并联机构是一种广泛应用于机器人、航空航天以及医疗器械等领域的重要机构类型。本论文以一种典型的3-RRP球面并联机构为对象,对其运动学进行了详细分析。首先,对该机构的结构和运动特点进行了介绍,然后通过建立合适的坐标系,推导出机构的运动学正解方程。通过对正解方程的分析,得出了球面并联机构的位移、速度以及加速度的表达式,并对其进行了性能分析。最后,通过数值仿真和实验验证了运动学分析结果的正确性。关键词:球面并联机构、运动学分析、
一种二自由度球面并联机构.pdf
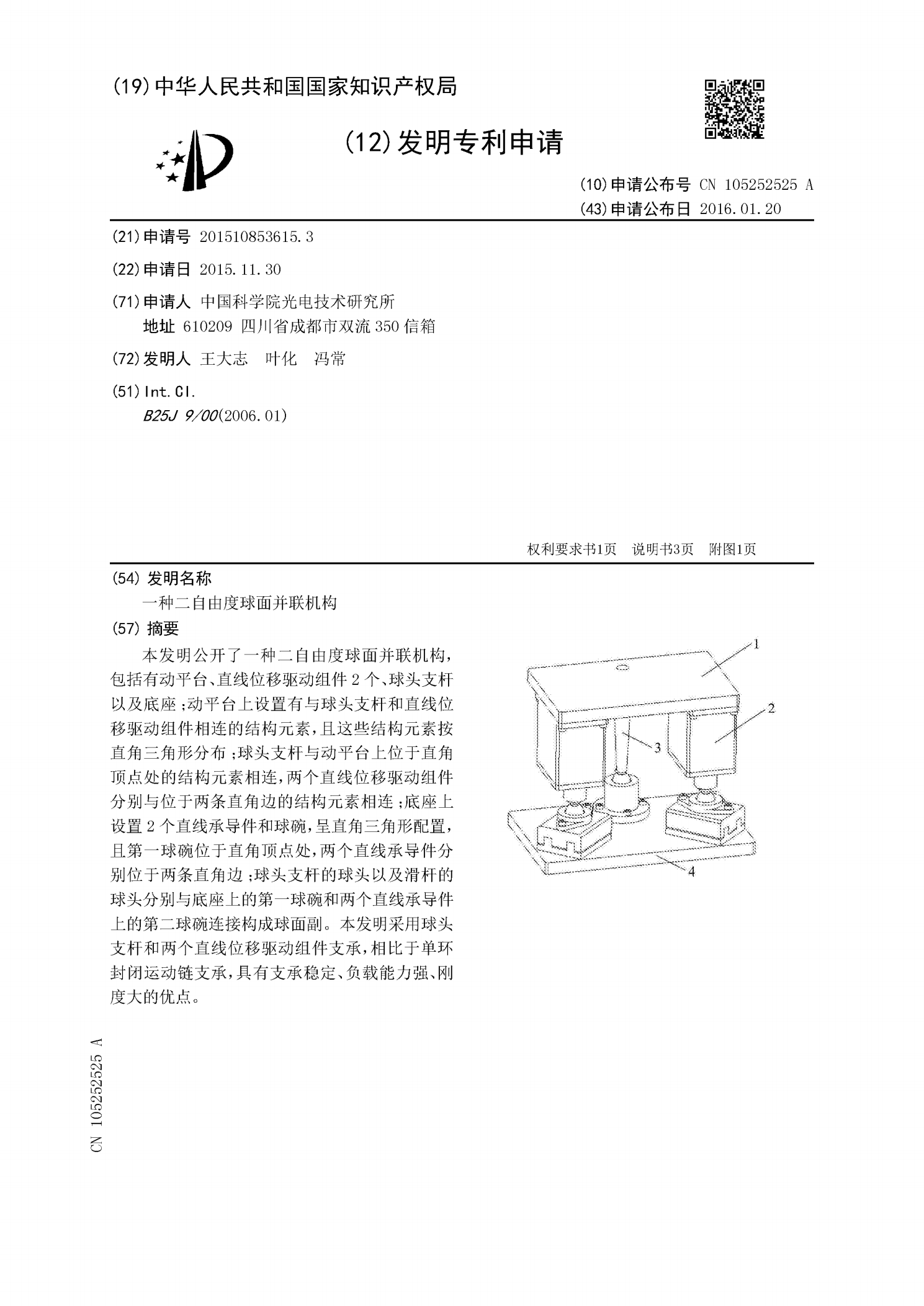
本发明公开了一种二自由度球面并联机构,包括有动平台、直线位移驱动组件2个、球头支杆以及底座;动平台上设置有与球头支杆和直线位移驱动组件相连的结构元素,且这些结构元素按直角三角形分布;球头支杆与动平台上位于直角顶点处的结构元素相连,两个直线位移驱动组件分别与位于两条直角边的结构元素相连;底座上设置2个直线承导件和球碗,呈直角三角形配置,且第一球碗位于直角顶点处,两个直线承导件分别位于两条直角边;球头支杆的球头以及滑杆的球头分别与底座上的第一球碗和两个直线承导件上的第二球碗连接构成球面副。本发明采用球头支杆和

空间3自由度并联机构运动学分析.docx
空间3自由度并联机构运动学分析空间3自由度并联机构是指机构的输出端有3个独立的自由度,可以在空间内完成3维运动。本论文将对空间3自由度并联机构的运动学进行详细分析,并通过实际案例进行说明。一、引言空间3自由度并联机构在工业自动化、航空航天等领域有着广泛应用。其中,运动学是机构研究中的关键问题,它研究了机构中各个构件之间的相互作用关系以及输出运动的规律。本论文将围绕空间3自由度并联机构的运动学分析展开阐述。二、机构结构与约束分析空间3自由度并联机构由固定基座和移动平台组成,平台上有3个独立的自由度。其中,基