
一种位-姿交替控制的机器人路径跟踪方法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种位-姿交替控制的机器人路径跟踪方法.docx
一种位-姿交替控制的机器人路径跟踪方法随着工业技术的不断发展,机器人技术越来越重要,被广泛应用于各个领域。在机器人领域中,路径跟踪是一项重要的技术。机器人路径跟踪是指机器人按照预先设计好的轨迹进行运动的过程。在传统的路径跟踪方法中,通常采用的是闭环控制策略,即机器人跟随已知的轨迹行走,但这种方法对于实时性和抗干扰性的要求比较高。本文将介绍一种新的机器人路径跟踪方法——位-姿交替控制,这种方法可以有效解决传统路径跟踪方法的问题。一、位-姿控制概述位-姿控制是一种相对较新的机器人控制方法,其基本思想是将机器人

基于位姿状态的全向运行型AGV路径跟踪优化控制方法.docx
基于位姿状态的全向运行型AGV路径跟踪优化控制方法随着物流和制造业的发展,物流需求不断增加,全向运行型AGV(全向移动导引车)在物流运输和物流场地的自动化中扮演着不可或缺的角色。针对现有的AGV路径跟踪方法在实际运行中存在的问题,如路径规划精度、路径跟踪精度、行驶时间等问题,本文提出了一种基于位姿状态的全向运行型AGV路径跟踪优化控制方法,以提高AGV行驶的精度和效率。一、AGV路径跟踪问题AGV路径跟踪是AGV自动化控制中的重要环节。AGV行驶状态通过测量和处理AGV与环境之间的数据获取,包括车速、转向

一种位姿自适应机器人的焊接系统及位姿调整方法.pdf
本发明提供了一种位姿自适应机器人的焊接系统及位姿调整方法,所述焊接系统包括焊接机器人、与所述焊接机器人通讯连接的主控机以及与所述主控机通讯连接的检测跟踪系统,所述检测跟踪系统包括设于焊枪上的用以检测焊缝的轮廓的线激光传感器以及设于焊枪上且位于焊枪的相对两侧的两个点激光传感器;所述主控机根据两个点激光传感器以及线激光传感器测得的数据得到所述焊接机器人的标准位姿并根据该标准位姿调整所述焊接机器人的位姿,从而在焊接进程中不断修正焊接机器人的位姿,使焊接机器人一直处于标准位姿下对工件进行焊接,能够适应焊接变形较大

Pure Pursuit算法在移动机器人路径跟踪的位姿修正研究.docx
PurePursuit算法在移动机器人路径跟踪的位姿修正研究AbstractPurePursuitalgorithmisawell-establishedtechniqueforpathtrackingofmobilerobots.Thisalgorithmiswidelyusedinvariousroboticsapplicationsasitprovidesasimplemechanismforefficientpathtracking.Thispaperpresentsastudyoftheuseo
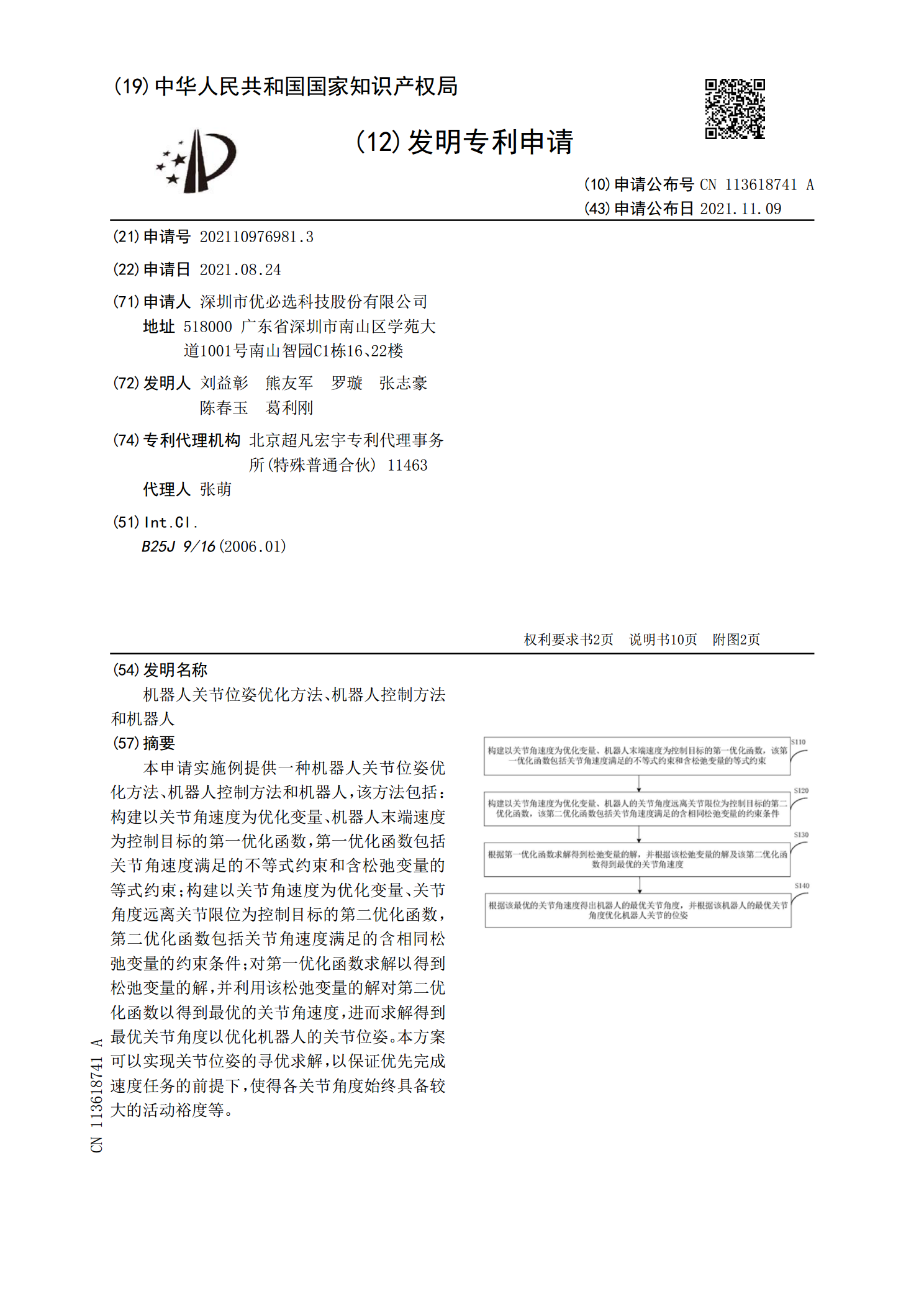
机器人关节位姿优化方法、机器人控制方法和机器人.pdf
本申请实施例提供一种机器人关节位姿优化方法、机器人控制方法和机器人,该方法包括:构建以关节角速度为优化变量、机器人末端速度为控制目标的第一优化函数,第一优化函数包括关节角速度满足的不等式约束和含松弛变量的等式约束;构建以关节角速度为优化变量、关节角度远离关节限位为控制目标的第二优化函数,第二优化函数包括关节角速度满足的含相同松弛变量的约束条件;对第一优化函数求解以得到松弛变量的解,并利用该松弛变量的解对第二优化函数以得到最优的关节角速度,进而求解得到最优关节角度以优化机器人的关节位姿。本方案可以实现关节位