
集装箱门式起重机用吊具路径优化控制系统.pdf

春景****23


1/10

2/10

3/10
4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

集装箱门式起重机用吊具路径优化控制系统.pdf
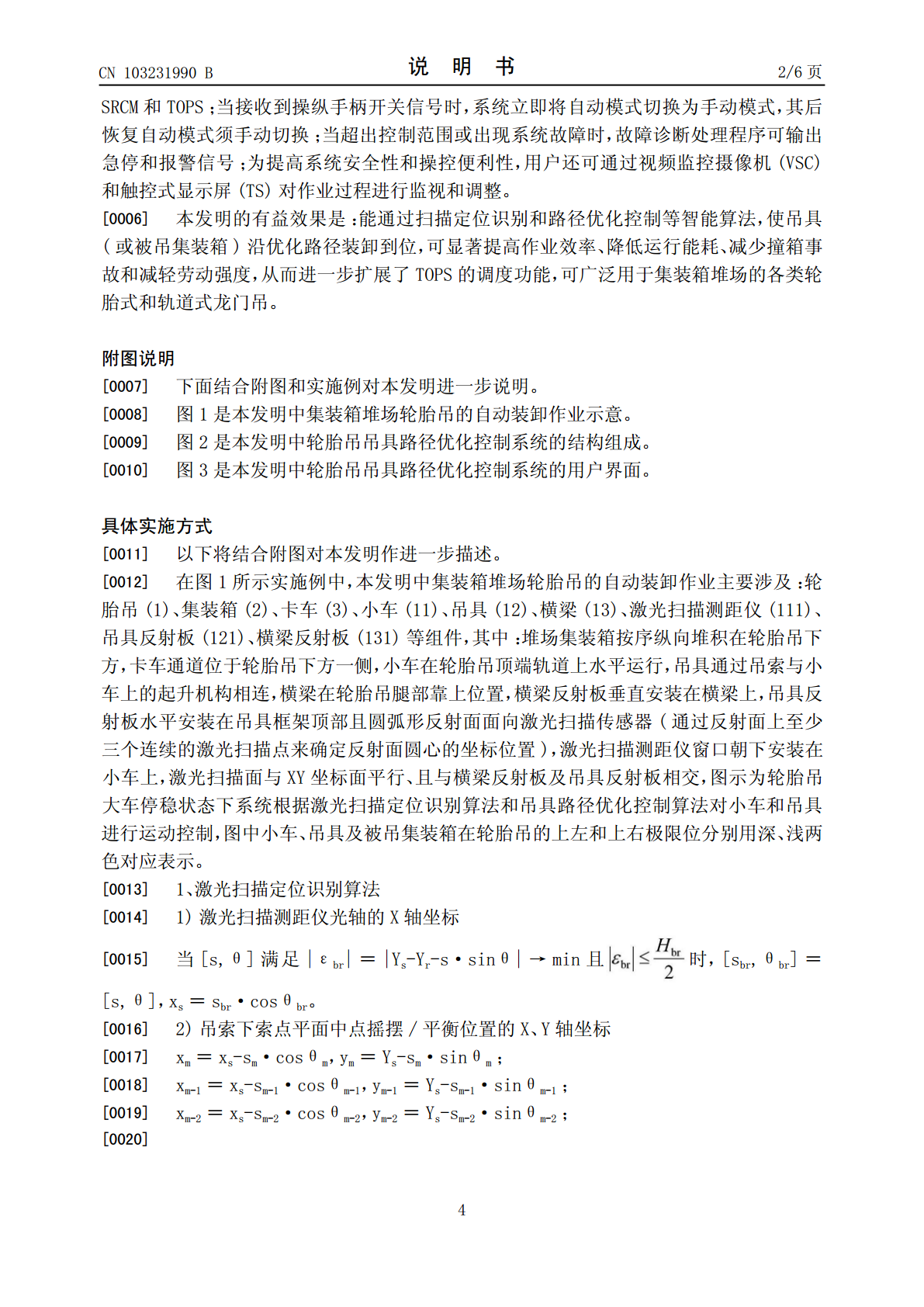
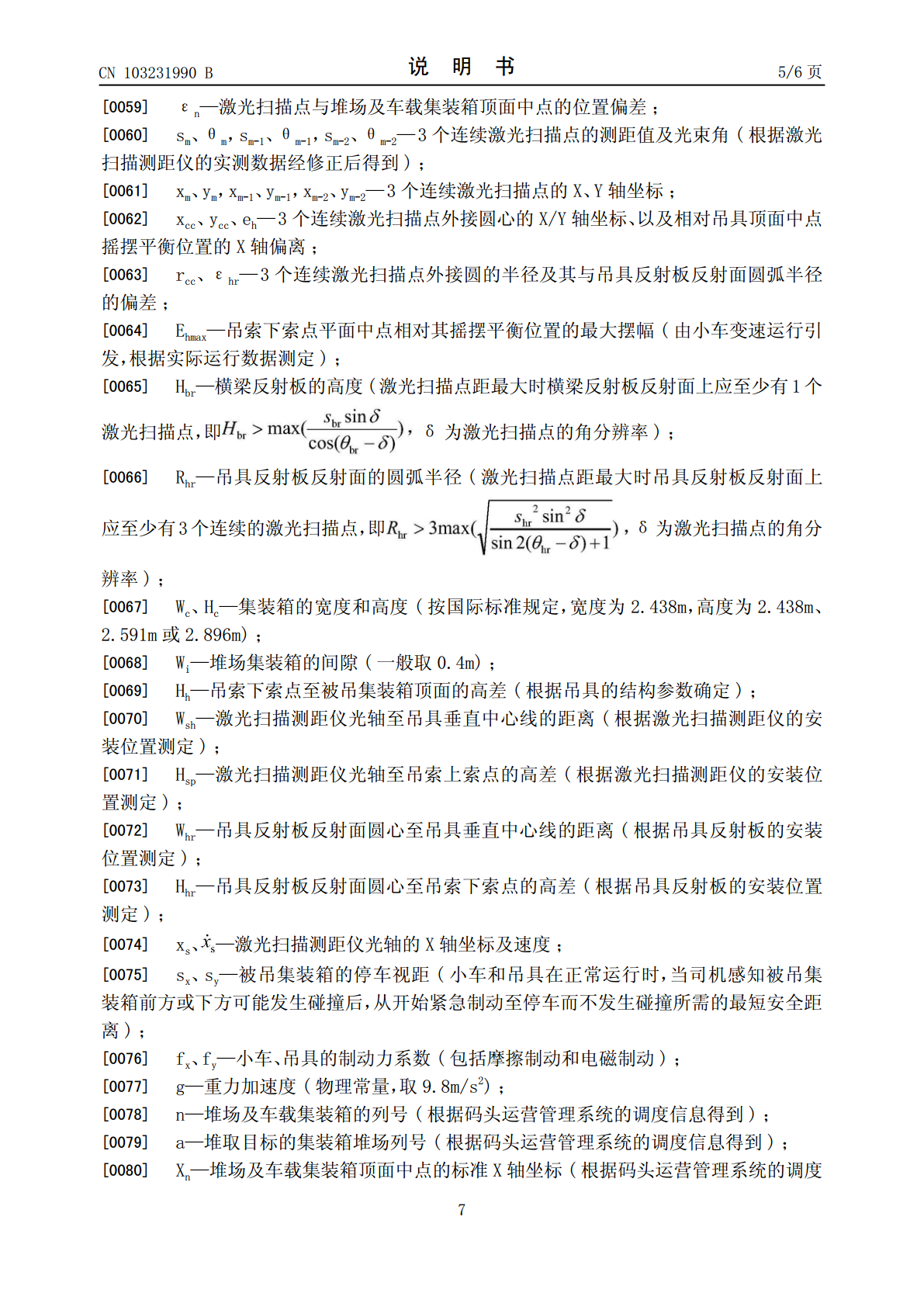
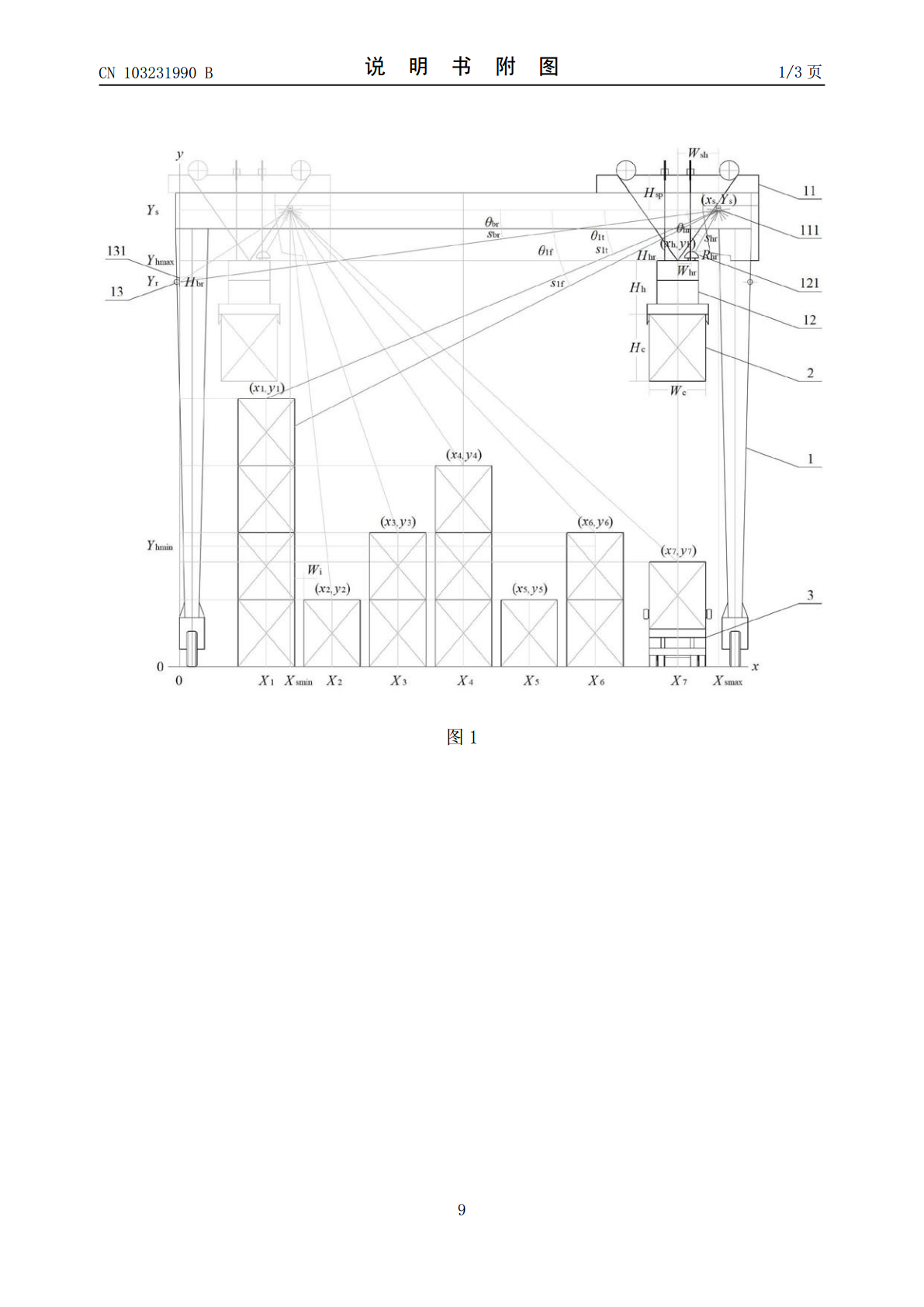
一种基于激光扫描定位技术的集装箱门式起重机用吊具路径优化控制系统,主要由吊具路径控制模块、激光扫描测距仪、视频监控摄像机、触控式显示屏等组件构成,能根据码头运营操作系统的调度指令和小车载激光扫描测距仪的测距信息,按照扫描定位识别和路径优化控制等智能算法,对堆场轮廓及吊具(或被吊集装箱)进行定位识别和路径优化,使吊具(或被吊集装箱)沿优化路径装卸到位。该系统能显著提高作业效率、降低运行能耗、减少撞箱事故和减轻劳动强度,从而进一步扩展了码头运营操作系统的调度功能,可广泛用于集装箱堆场的各类轮胎式和轨道式龙门吊

集装箱门式起重机吊具防摇机构.pdf
本发明公开了集装箱门式起重机吊具防摇机构,包括主梁和防摇悬架,防摇悬架通过上方呈矩形阵列设置的四个支柱与主梁固定连接,并且每个支柱上转动设置一个防摇伸缩杆,再在防摇伸缩杆的伸出端上固定设置一个防摇环,最后,在主梁上设置一个放线组件,防摇伸缩杆的可自由伸缩的特性,使得该防摇机构可以作用于不同长度、不同宽度的集装箱,保证集装箱在吊运过程中不会出现摇摆或者晃动的情况。

轨道式集装箱门式起重机.pdf
本发明公开了一种轨道式集装箱门式起重机,包括门框钢结构、大车运行机构、起升机构、吊具组件、吊具平移机构和吊具倾转机构,门框钢结构包括支腿和门框主梁;大车运行机构设置于各支腿底端,驱动大车的运行方向与集装箱长度方向垂直;起升机构包括卷筒及其驱动机构,还包括在卷筒上连接的分别向门框主梁两端延伸的第一第二钢丝绳组;吊具组件设置于门框主梁下方,其纵向上的两端分别连接于第一第二钢丝绳组;吊具平移机构包括分别位于门框主梁两端的第一第二滑轮组,以及驱动滑轮组的驱动件;第一驱动件与第二驱动件同方向驱动第一第二滑轮组;吊具
一种门座式起重机用集装箱倾转吊具.pdf
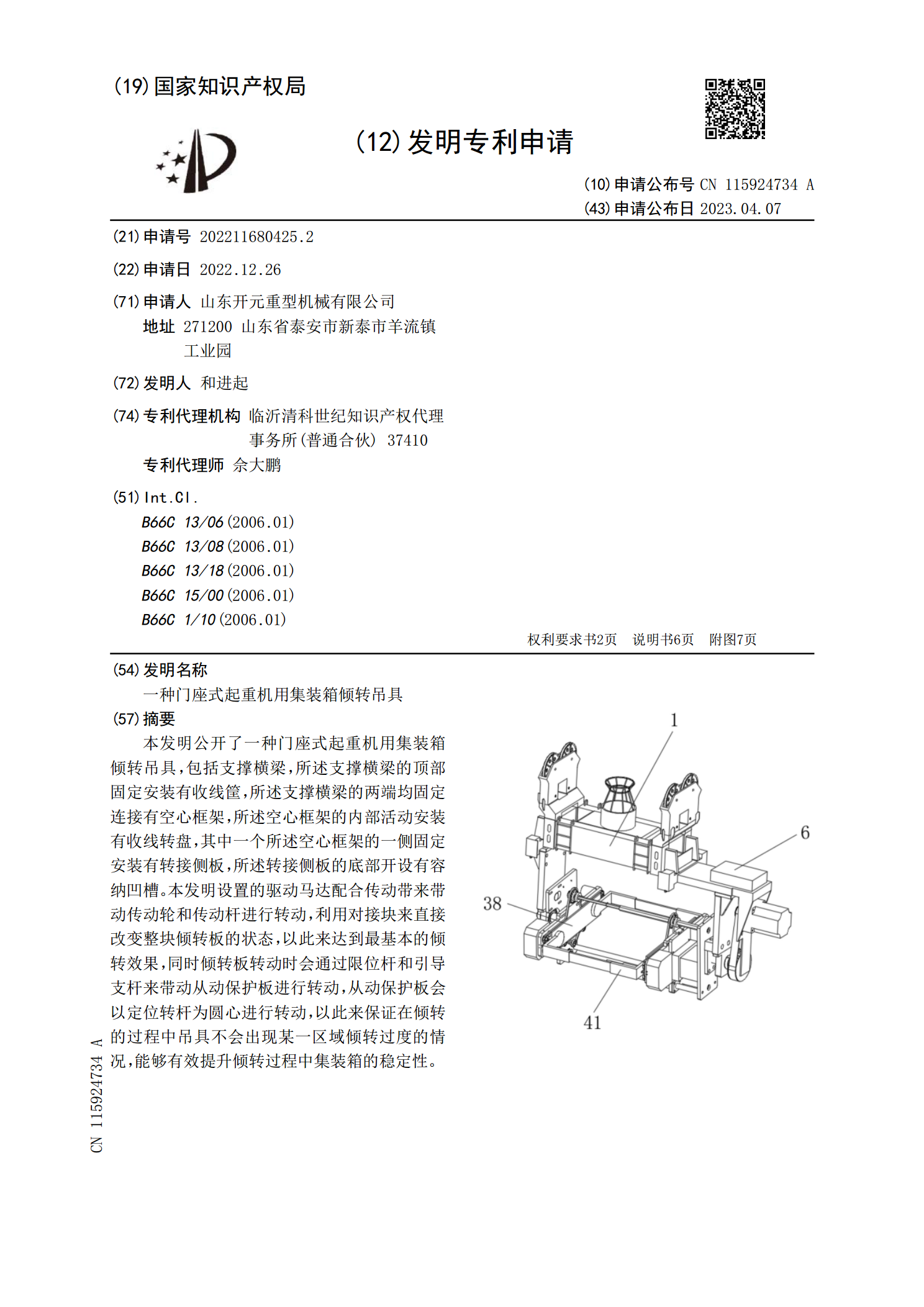
本发明公开了一种门座式起重机用集装箱倾转吊具,包括支撑横梁,所述支撑横梁的顶部固定安装有收线筐,所述支撑横梁的两端均固定连接有空心框架,所述空心框架的内部活动安装有收线转盘,其中一个所述空心框架的一侧固定安装有转接侧板,所述转接侧板的底部开设有容纳凹槽。本发明设置的驱动马达配合传动带来带动传动轮和传动杆进行转动,利用对接块来直接改变整块倾转板的状态,以此来达到最基本的倾转效果,同时倾转板转动时会通过限位杆和引导支杆来带动从动保护板进行转动,从动保护板会以定位转杆为圆心进行转动,以此来保证在倾转的过程中吊具

轮胎式集装箱龙门起重机液压吊具节能改造.docx
轮胎式集装箱龙门起重机液压吊具节能改造随着船舶装卸业的发展和技术的不断革新,集装箱是现代国际货运的基本载体,其在物流行业中扮演着越来越重要的角色。轮胎式集装箱龙门起重机是港口装卸作业的主要设备,起重机的稳定性和安全性直接关系到港口集装箱装卸行业的高效率、安全性和节能性能。为了提高集装箱起重机的作业效率和提高设备的安全性能,必须对其进行技术改造和节能改造。轮胎式集装箱龙门起重机的液压吊具是采用液压作为起重机的起升、伸出和回转机构的源动力,液压系统的稳定性、安全性和耐久性都直接影响起重机的运行效率和安全性。为