
改进残差网络的多角度车型识别方法.docx

快乐****蜜蜂


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

改进残差网络的多角度车型识别方法.docx
改进残差网络的多角度车型识别方法标题:基于改进的残差网络的多角度车型识别方法摘要:随着计算机视觉领域的发展,车型识别技术在交通领域、公共安全以及智能驾驶等方面具有重要的应用。然而,由于车辆外观的复杂性以及多种角度的视角变换,车型识别任务依然面临着挑战。本文提出了一种基于改进的残差网络的多角度车型识别方法,通过在残差网络中应用多尺度卷积模块,结合数据扩增和特征融合策略,提高了多角度车型识别的准确性和鲁棒性。实验证明,所提出的方法在车型识别任务中取得了优异的性能。1.引言1.1背景介绍1.2研究意义2.相关工

基于改进残差网络的车型识别算法.docx
基于改进残差网络的车型识别算法基于改进残差网络的车型识别算法摘要:车型识别是计算机视觉领域的一个重要问题,具有广泛的应用前景。在本论文中,我们提出了一种基于改进残差网络的车型识别算法。该算法通过引入注意力机制和特征融合模块,有效地提高了车型识别的准确率和鲁棒性。实验结果表明,我们的方法在公开数据集上取得了良好的性能。1.引言车型识别在智能交通、车辆安全等领域具有重要的应用价值,然而由于车辆外观的多样性以及姿态变化的影响,车型识别任务依然具有一定的挑战。近年来,深度学习在计算机视觉领域取得了突破性的进展,为

一种改进的残差网络宫颈癌细胞图像识别方法.docx
一种改进的残差网络宫颈癌细胞图像识别方法Title:AnImprovedResidualNetworkApproachforCervicalCancerCellImageRecognitionAbstract:Cervicalcancerisoneoftheleadingcausesofcancer-relateddeathsinwomenworldwide.Earlyandaccuratedetectionofcervicalcancercellsisessentialforitssuccessfult
一种基于改进残差神经网络的人脸表情识别方法.pdf
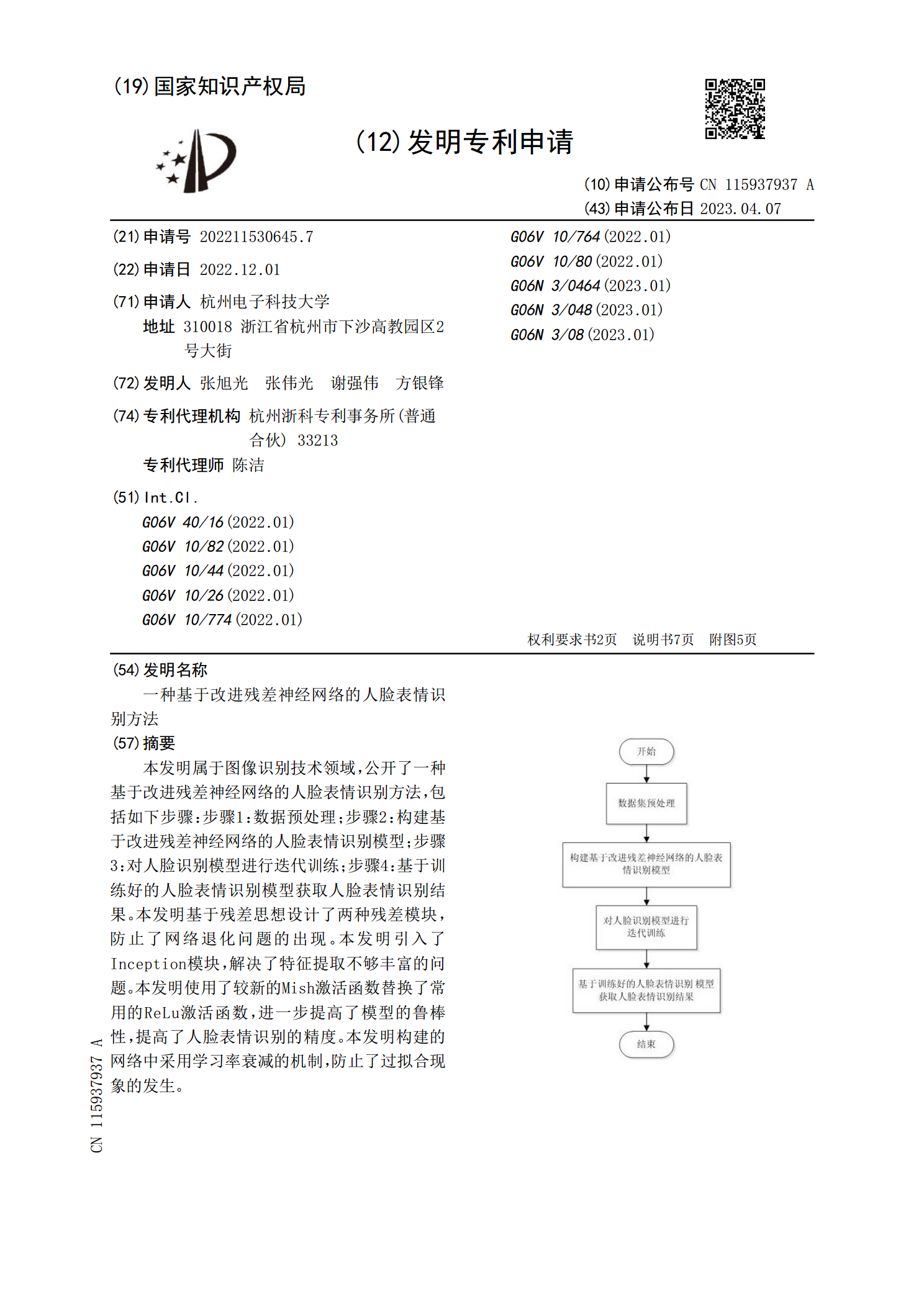
本发明属于图像识别技术领域,公开了一种基于改进残差神经网络的人脸表情识别方法,包括如下步骤:步骤1:数据预处理;步骤2:构建基于改进残差神经网络的人脸表情识别模型;步骤3:对人脸识别模型进行迭代训练;步骤4:基于训练好的人脸表情识别模型获取人脸表情识别结果。本发明基于残差思想设计了两种残差模块,防止了网络退化问题的出现。本发明引入了Inception模块,解决了特征提取不够丰富的问题。本发明使用了较新的Mish激活函数替换了常用的ReLu激活函数,进一步提高了模型的鲁棒性,提高了人脸表情识别的精度。本发明

基于改进型MobileNet网络的车型识别方法.docx
基于改进型MobileNet网络的车型识别方法摘要车型识别是计算机视觉领域的一个重要问题,具有广泛应用前景。本文提出了一种基于改进型MobileNet网络的车型识别方法。首先,我们介绍了MobileNet网络结构,并分析了其在车型识别任务中存在的问题。然后,针对这些问题,我们提出了一些改进策略,包括引入注意力机制、调整网络结构和训练策略等。通过实验证明,我们的方法在车型识别任务上取得了较好的性能,相比传统的车型识别方法有明显的改进。1.引言随着近年来汽车数量的快速增长,车型的识别变得越来越重要。车型识别不