
拮抗变刚度关节驱动器设计与特性分析.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

拮抗变刚度关节驱动器设计与特性分析.docx
拮抗变刚度关节驱动器设计与特性分析拮抗变刚度关节驱动器设计与特性分析一、引言机器人技术的发展推动了关节驱动器的研究与创新。在机器人运动中,关节驱动器起到了关键的作用。传统的关节驱动器通常采用固定的刚度设计,但这种设计方法无法适应各种不同工作场景的需求。拮抗变刚度关节驱动器是一种能够根据实际运动需求自动调节刚度的驱动器,它能够在不同工况下灵活调整刚度以达到更好的运动性能。本论文将对拮抗变刚度关节驱动器的设计与特性进行分析,以期为机器人关节驱动器的研究和应用提供参考。二、拮抗变刚度关节驱动器的设计原理拮抗变刚

变刚度关节驱动器动力学特性的分析与研究.docx
变刚度关节驱动器动力学特性的分析与研究标题:变刚度关节驱动器动力学特性的分析与研究摘要:变刚度关节驱动器是一种具有可调节关节刚度的机械驱动装置,其在机器人领域具有广泛的应用前景。本文基于对变刚度关节驱动器动力学特性的分析与研究,对该驱动器的工作原理、驱动机构、控制策略以及应用前景进行探讨,旨在为机器人领域相关研究提供参考与借鉴。一、引言随着机器人技术的不断发展,对关节刚度可调节性的需求越来越高。变刚度关节驱动器作为一种创新型的机械驱动装置,被广泛应用于模仿人体肌肉的机器人、协作机器人以及医疗机器人等领域。

变截面弹簧设计及其刚度特性分析.docx
变截面弹簧设计及其刚度特性分析标题:变截面弹簧设计及其刚度特性分析摘要:本论文介绍了变截面弹簧的设计原理和工作原理,并分析了其刚度特性。通过对弹簧变截面设计的研究,可以实现在不同载荷下提供恰当的弹性变化,以满足工程应用的需要。本论文还讨论了变截面弹簧在机械系统中的应用,以及在不同工程领域中的潜在应用。最后,提出了今后对变截面弹簧的进一步研究的方向和建议。关键词:变截面弹簧;设计原理;工作原理;刚度特性;应用领域一、引言变截面弹簧是一种具有变截面形状的弹簧,能够在不同的载荷条件下提供恰当的弹性变化。它通过控

基于凸轮机构的变刚度仿生柔性关节设计与分析.docx
基于凸轮机构的变刚度仿生柔性关节设计与分析标题:基于凸轮机构的变刚度仿生柔性关节设计与分析摘要:本论文旨在研究基于凸轮机构的变刚度仿生柔性关节的设计与分析。利用凸轮机构的特点,在保持柔性关节柔韧性的同时,实现其刚度的可调节。首先介绍了仿生学的基本概念和发展现状,以及柔性关节的应用领域。然后详细讨论了凸轮机构及其工作原理,并提出了基于凸轮机构的变刚度仿生柔性关节的设计方案。通过对该方案进行理论分析和仿真验证,证明了凸轮机构对柔性关节刚度调节的可行性。最后,通过对凸轮机构关节的力学特性分析和刚度调节性能评估,
变刚度弹性驱动器.pdf
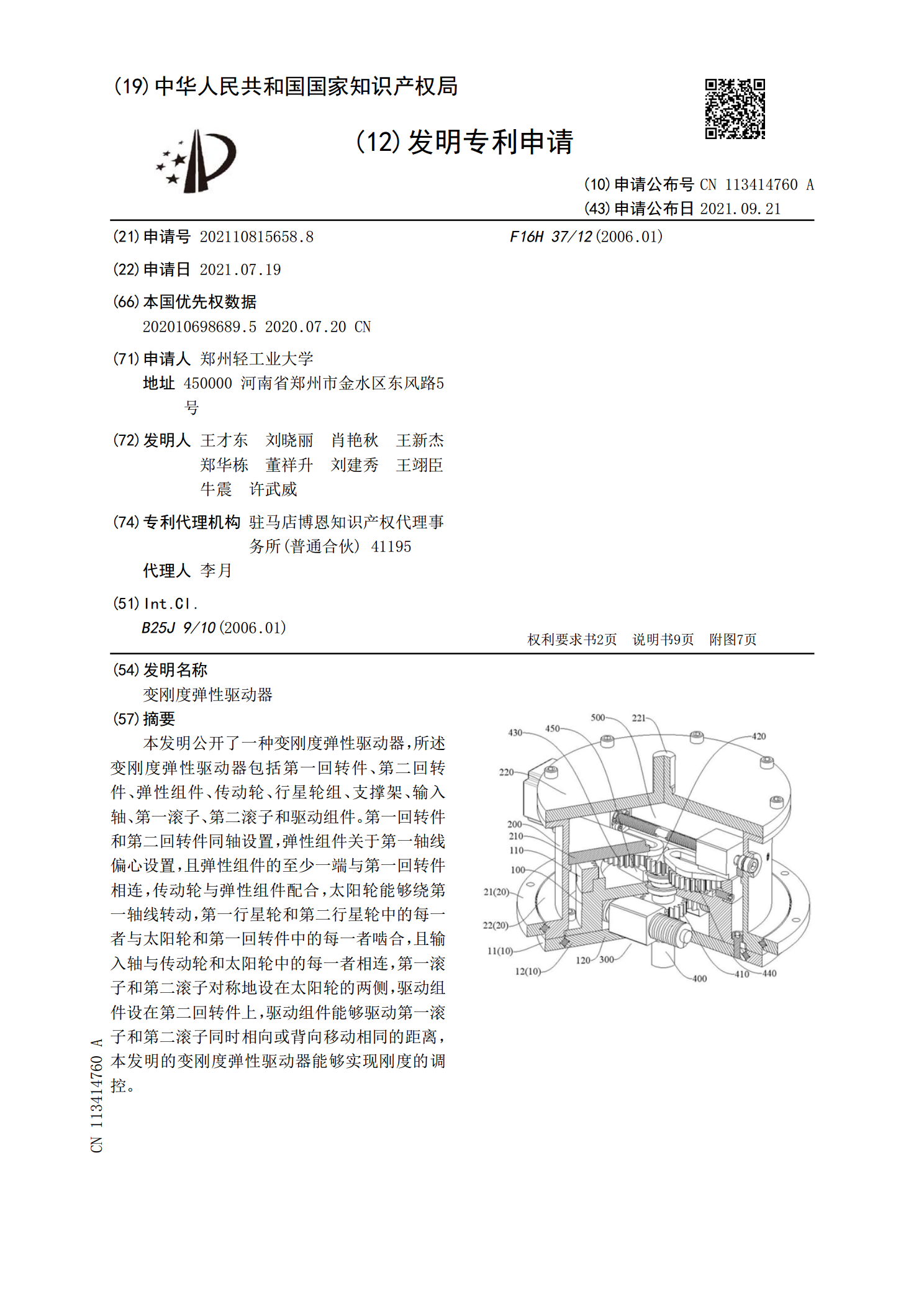
本发明公开了一种变刚度弹性驱动器,所述变刚度弹性驱动器包括第一回转件、第二回转件、弹性组件、传动轮、行星轮组、支撑架、输入轴、第一滚子、第二滚子和驱动组件。第一回转件和第二回转件同轴设置,弹性组件关于第一轴线偏心设置,且弹性组件的至少一端与第一回转件相连,传动轮与弹性组件配合,太阳轮能够绕第一轴线转动,第一行星轮和第二行星轮中的每一者与太阳轮和第一回转件中的每一者啮合,且输入轴与传动轮和太阳轮中的每一者相连,第一滚子和第二滚子对称地设在太阳轮的两侧,驱动组件设在第二回转件上,驱动组件能够驱动第一滚子和第二