
基于凸轮机构的变刚度仿生柔性关节设计与分析.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于凸轮机构的变刚度仿生柔性关节设计与分析.docx
基于凸轮机构的变刚度仿生柔性关节设计与分析标题:基于凸轮机构的变刚度仿生柔性关节设计与分析摘要:本论文旨在研究基于凸轮机构的变刚度仿生柔性关节的设计与分析。利用凸轮机构的特点,在保持柔性关节柔韧性的同时,实现其刚度的可调节。首先介绍了仿生学的基本概念和发展现状,以及柔性关节的应用领域。然后详细讨论了凸轮机构及其工作原理,并提出了基于凸轮机构的变刚度仿生柔性关节的设计方案。通过对该方案进行理论分析和仿真验证,证明了凸轮机构对柔性关节刚度调节的可行性。最后,通过对凸轮机构关节的力学特性分析和刚度调节性能评估,

一种基于凸轮机构的变刚度关节.pdf
本发明提供了一种基于凸轮机构的变刚度关节,包括壳体、输入控制端、变刚度调节组件,输入控制端用于驱动壳体围绕其回转中心转动,其包括关节输入转轴,壳体的前端设置有负载盘,变刚度调节组件用于调节关节的刚度值;刚度调节组件包括花键滑块、滚子、圆柱凸轮、连接法兰、弹簧载盘、楔形滑块、弹簧器;关节输入转轴的外侧表面花键槽,花键滑块与花键槽相配合,滚子固定设在花键滑块上;在圆柱凸轮设有轮廓曲面,滚子与轮廓曲面接触;圆柱凸轮通过连接法兰和壳体连接,弹簧载盘设在圆柱凸轮的前端面和后端面,与滚子接触,楔形滑块滑动设在弹簧载盘
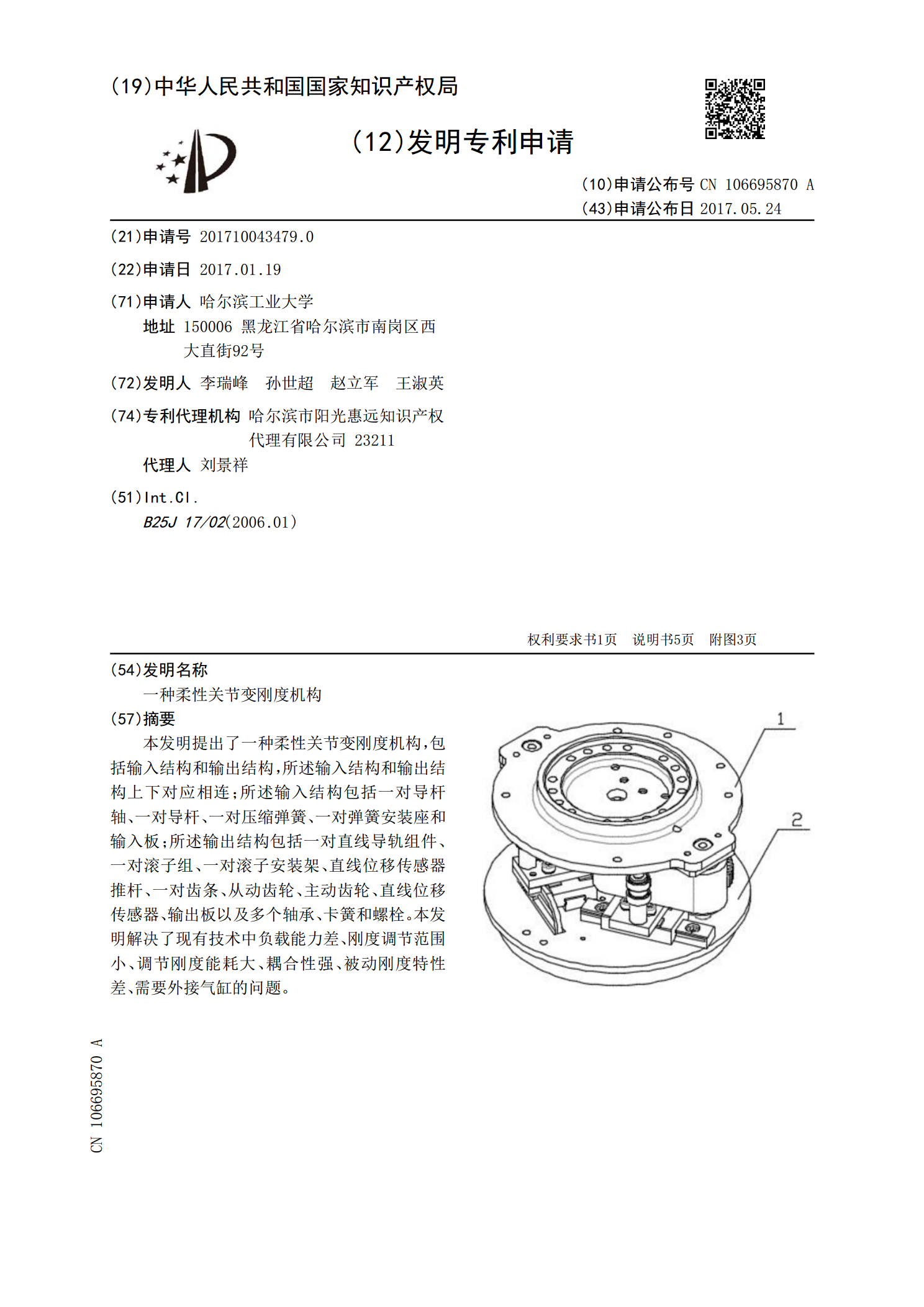
一种柔性关节变刚度机构.pdf
本发明提出了一种柔性关节变刚度机构,包括输入结构和输出结构,所述输入结构和输出结构上下对应相连;所述输入结构包括一对导杆轴、一对导杆、一对压缩弹簧、一对弹簧安装座和输入板;所述输出结构包括一对直线导轨组件、一对滚子组、一对滚子安装架、直线位移传感器推杆、一对齿条、从动齿轮、主动齿轮、直线位移传感器、输出板以及多个轴承、卡簧和螺栓。本发明解决了现有技术中负载能力差、刚度调节范围小、调节刚度能耗大、耦合性强、被动刚度特性差、需要外接气缸的问题。

仿生对抗变刚度驱动关节的研究与设计.docx
仿生对抗变刚度驱动关节的研究与设计标题:仿生对抗变刚度驱动关节的研究与设计摘要:随着机器人技术的不断发展,仿生机器人的研究也逐渐受到关注。本论文旨在探讨仿生对抗变刚度驱动关节的研究与设计。首先介绍了变刚度驱动关节的概念及其在机器人领域中的应用,然后介绍了仿生的概念以及仿生机器人与生物体之间的联系。接着,本文详细介绍了对抗变刚度驱动关节的原理与方法,并分析了该设计的优缺点。最后,本文对仿生对抗变刚度驱动关节的未来发展进行了展望。关键词:仿生机器人、对抗变刚度驱动关节、生物体、机器人技术引言:在工业生产、医疗

一种变刚度仿生柔性摆动推进机构.pdf
一种变刚度仿生柔性摆动推进机构,它涉及一种推进机构,本发明第一马达安装在鱼头的内侧壁上,主动锥齿轮套装在第一马达的输出轴上,两个锥齿轮减速器通过支架安装在鱼头的内侧壁上,两个从动锥齿轮分别套装在锥齿轮减速器的转动轴上,主动锥齿轮分别与两个从动锥齿轮啮合,锥齿轮减速器的两个输出轴分别与两个曲柄连接,两个曲柄的旋转方向相反,每个曲柄通过滑轨组件与薄壁弹性梁连接,薄壁弹性梁与鱼尾连接,椭圆拉簧的一端与鱼尾固定连接,椭圆拉簧的另一端与收紧组件连接,收紧组件安装在鱼头的内侧壁上,两个骨架相对设置在椭圆拉簧的外侧,每