
基于眼球前庭动眼反射的机器人视觉误差主动补偿方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于眼球前庭动眼反射的机器人视觉误差主动补偿方法.docx
基于眼球前庭动眼反射的机器人视觉误差主动补偿方法摘要本文提出了一种基于眼球前庭动眼反射的机器人视觉误差主动补偿方法。该方法通过对人眼视觉方案的分析和研究,提取眼球前庭动眼反射等生理学特征,建立视觉误差补偿模型并应用于机器人视觉系统中。实验结果表明,该方法能够有效地提高机器人视觉系统的精度和稳定性。关键词:机器人视觉;前庭动眼反射;视觉误差补偿;生理学特征;精度和稳定性AbstractThispaperproposesamethodforactivelycompensatingvisualerrorsinr

显示系统中前庭眼球反射校正的设计和方法.pdf
公开了显示系统中前庭眼球反射校正的设计和方法。一种用于在头戴式显示(HMD)设备上显示图像的方法,该头戴式显示(HMD)设备对用户的前庭眼球反射(VOR)响应进行补偿。所显示的HMD图像被针对所预测的眼睛位置进行补偿,以使得在由头部运动引起的瞬时眼睛移动期间所显示的图像居中停留在眼睛的凹处上,造成更好的显示可读性、识别力和认知处理。

数控加工误差主动补偿方法.docx
数控加工误差主动补偿方法随着数控加工技术的发展,加工精度得到了不断提高,但是在实际加工过程中,由于材料、机床、刀具等因素的影响,难免会出现加工误差。为了保证加工精度,必须采取一定的措施对加工误差进行补偿。本文将从什么是数控加工误差、误差的产生原因以及误差补偿方法等方面进行探讨。一、数控加工误差数控加工误差是指实际加工尺寸与设计尺寸之间的差值,通俗地说就是加工出来的工件与图纸上设计的工件之间的偏差。数控加工误差分为系统误差和随机误差两种类型,其中系统误差是由于机床、工具、夹具等因素引起的,是可预测的,而随机

基于机器视觉的工业机器人位姿误差的标定与补偿方法研究的任务书.docx
基于机器视觉的工业机器人位姿误差的标定与补偿方法研究的任务书一、任务背景在现代工业生产中,工业机器人越来越广泛地应用于自动化加工和物流领域。通过机器人的高速度、高灵活性和高稳定性等特点,可以减少人力成本和物料损失,提高生产效率和产品质量。然而,机器人的运动精度和位姿精度直接影响产品质量和生产效率,特别是在高精度加工领域,如光电、半导体、精密加工等领域,对机器人的位姿要求更为严格。由于工业机器人在运动过程中,受到众多因素的影响,如机器本身的精度、机器人位姿标定误差、环境干扰等,使得机器人的位姿误差无法避免。
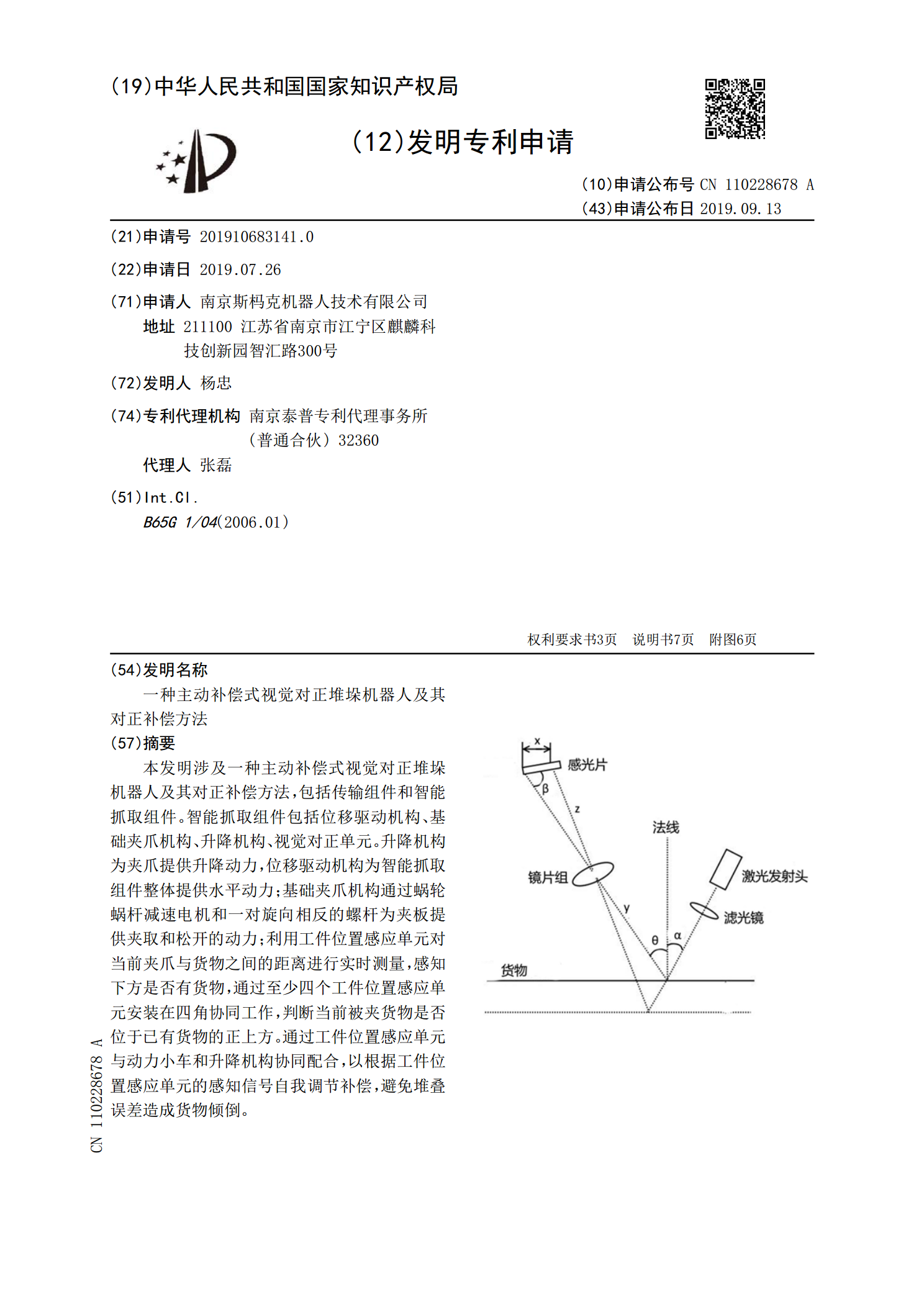
一种主动补偿式视觉对正堆垛机器人及其对正补偿方法.pdf
本发明涉及一种主动补偿式视觉对正堆垛机器人及其对正补偿方法,包括传输组件和智能抓取组件。智能抓取组件包括位移驱动机构、基础夹爪机构、升降机构、视觉对正单元。升降机构为夹爪提供升降动力,位移驱动机构为智能抓取组件整体提供水平动力;基础夹爪机构通过蜗轮蜗杆减速电机和一对旋向相反的螺杆为夹板提供夹取和松开的动力;利用工件位置感应单元对当前夹爪与货物之间的距离进行实时测量,感知下方是否有货物,通过至少四个工件位置感应单元安装在四角协同工作,判断当前被夹货物是否位于已有货物的正上方。通过工件位置感应单元与动力小车和