
一种主动补偿式视觉对正堆垛机器人及其对正补偿方法.pdf

小琛****82

1/10
2/10

3/10

4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种主动补偿式视觉对正堆垛机器人及其对正补偿方法.pdf
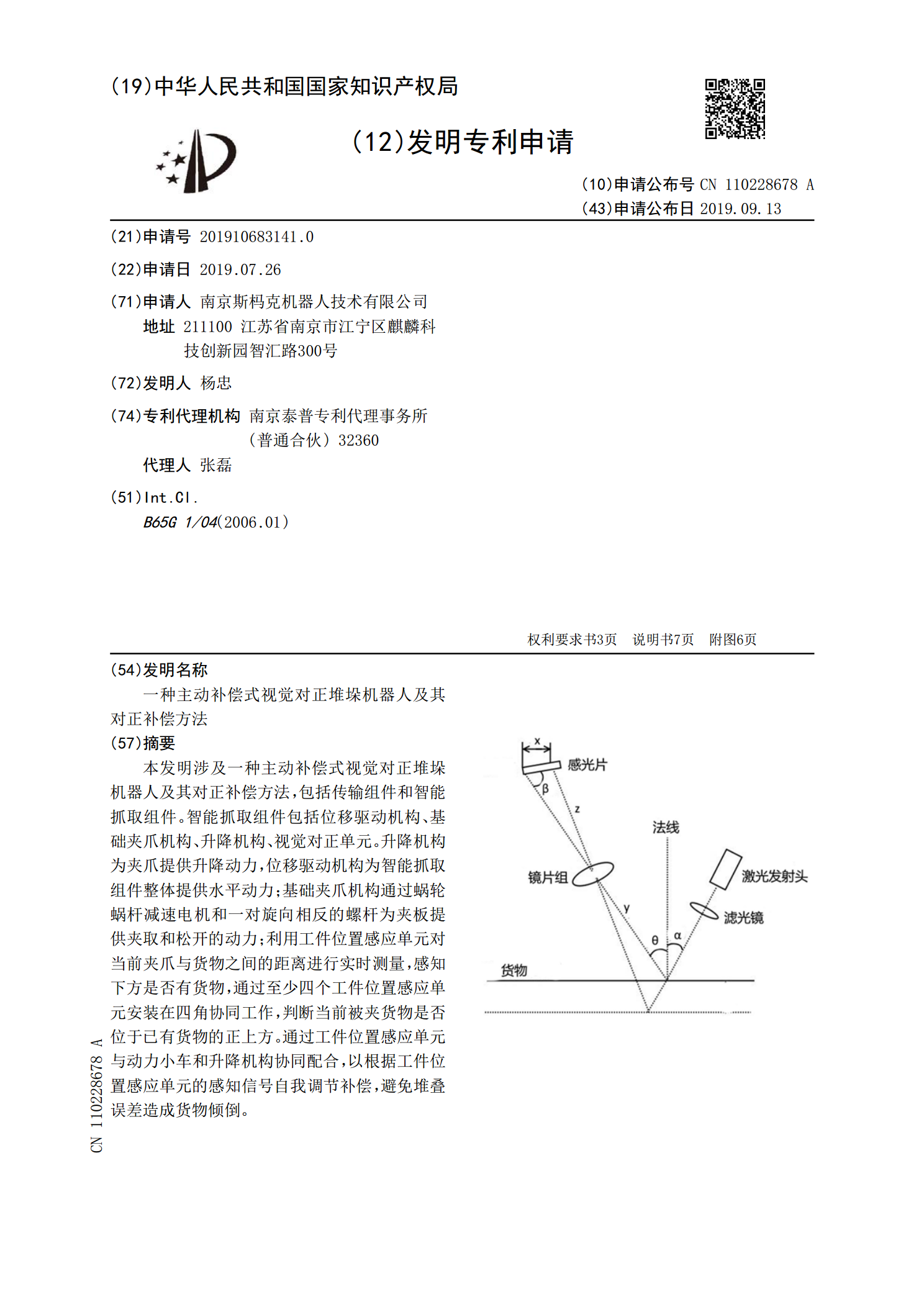
本发明涉及一种主动补偿式视觉对正堆垛机器人及其对正补偿方法,包括传输组件和智能抓取组件。智能抓取组件包括位移驱动机构、基础夹爪机构、升降机构、视觉对正单元。升降机构为夹爪提供升降动力,位移驱动机构为智能抓取组件整体提供水平动力;基础夹爪机构通过蜗轮蜗杆减速电机和一对旋向相反的螺杆为夹板提供夹取和松开的动力;利用工件位置感应单元对当前夹爪与货物之间的距离进行实时测量,感知下方是否有货物,通过至少四个工件位置感应单元安装在四角协同工作,判断当前被夹货物是否位于已有货物的正上方。通过工件位置感应单元与动力小车和

一种风力发电风轮安装对正装置及其对正方法.pdf
本发明公开了一种风力发电风轮安装对正装置及其对正方法,属于风力发电机机舱组安装技术领域。该风力发电风轮安装对正装置包括:第一筒体和第二筒体,第一筒体通过固定夹设置在第一环形盘内壁,第一筒体的端面设有多个螺纹孔,各螺纹孔均螺纹连接一个定位螺栓,定位螺栓的端面固定有圆球;第二筒体通过固定夹固定在第二环形盘的内壁,第二筒体的端部滑动设置有与圆球对应的连杆,连杆的端部固定连接球壳的外壁。使用本风力发电风轮安装对正装置能够安全高效地将轮毂固定在发电机机舱上,使得工人能够在更大风级下完成安装施工,避免了发生风轮撞击发
一种车辆对正装置及对正方法.pdf
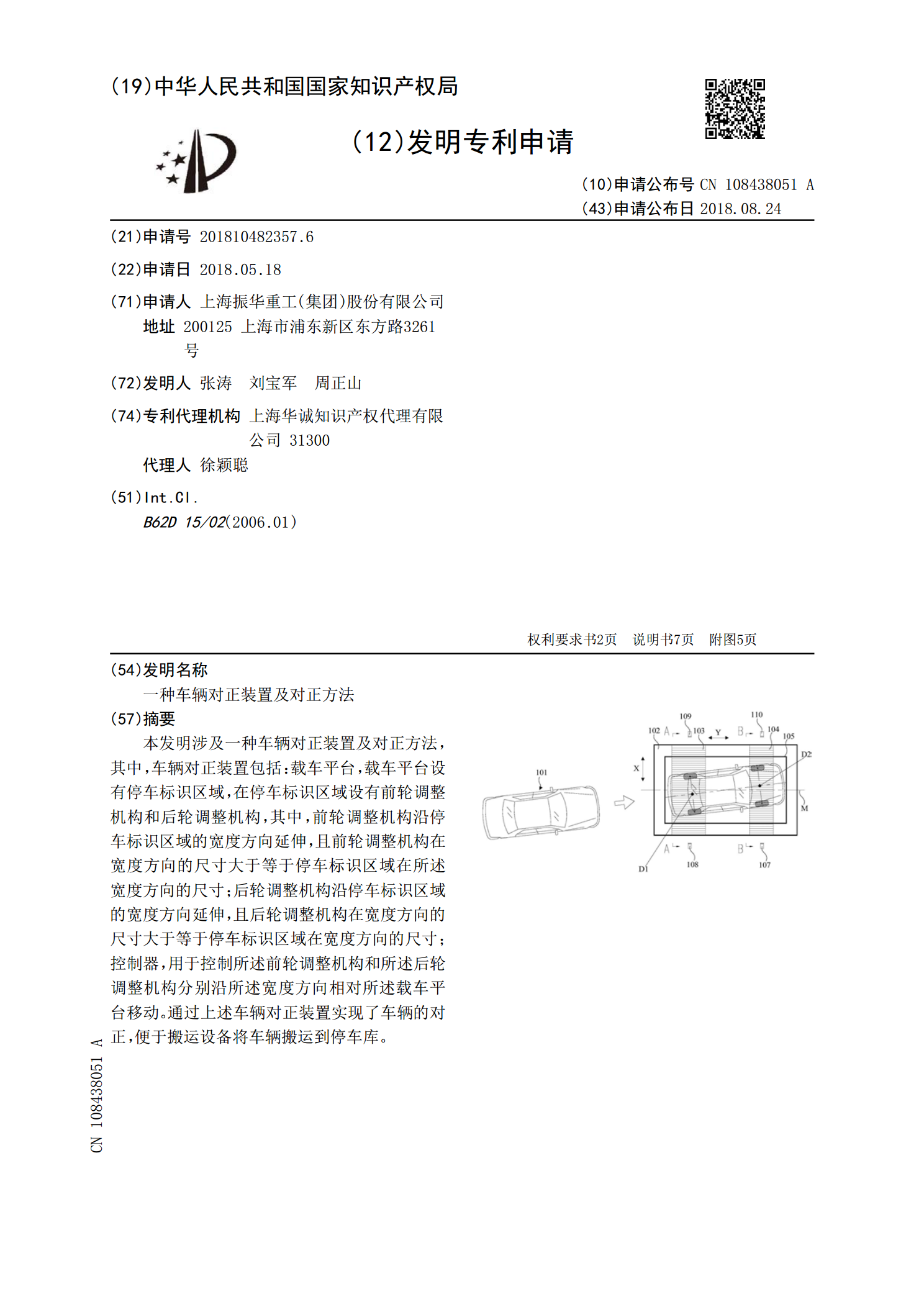
本发明涉及一种车辆对正装置及对正方法,其中,车辆对正装置包括:载车平台,载车平台设有停车标识区域,在停车标识区域设有前轮调整机构和后轮调整机构,其中,前轮调整机构沿停车标识区域的宽度方向延伸,且前轮调整机构在宽度方向的尺寸大于等于停车标识区域在所述宽度方向的尺寸;后轮调整机构沿停车标识区域的宽度方向延伸,且后轮调整机构在宽度方向的尺寸大于等于停车标识区域在宽度方向的尺寸;控制器,用于控制所述前轮调整机构和所述后轮调整机构分别沿所述宽度方向相对所述载车平台移动。通过上述车辆对正装置实现了车辆的对正,便于搬运

一种修磨机砂轮对正工具及其对正方法.pdf
修磨机砂轮对正工具,属于冶金企业生产辅助设施,它包括一块金属体,其特征是金属体的一端设有定位槽,定位槽与修磨机磨头主轴键配合,另一端设有导向部位,导向部位与砂轮更换装置键槽配合。采用本发明进行修磨机砂轮对正,减少了安装砂轮所用的时间,减轻了劳动强度,且避免了磨头主轴键的端面和主轴外锥面受损伤。
一种用于铁钻工缺口的自动对正装置及其对正方法.pdf
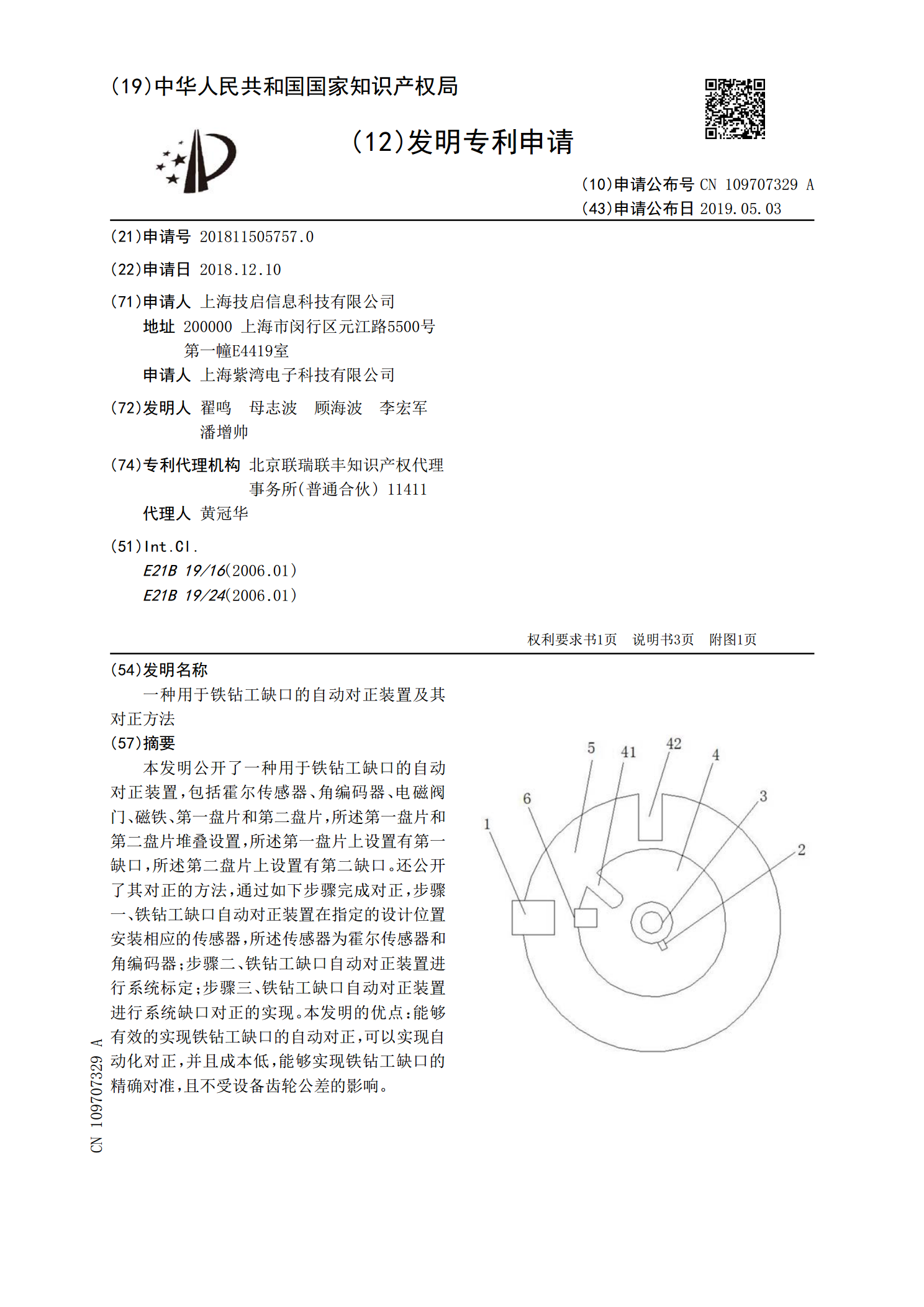
本发明公开了一种用于铁钻工缺口的自动对正装置,包括霍尔传感器、角编码器、电磁阀门、磁铁、第一盘片和第二盘片,所述第一盘片和第二盘片堆叠设置,所述第一盘片上设置有第一缺口,所述第二盘片上设置有第二缺口。还公开了其对正的方法,通过如下步骤完成对正,步骤一、铁钻工缺口自动对正装置在指定的设计位置安装相应的传感器,所述传感器为霍尔传感器和角编码器;步骤二、铁钻工缺口自动对正装置进行系统标定;步骤三、铁钻工缺口自动对正装置进行系统缺口对正的实现。本发明的优点:能够有效的实现铁钻工缺口的自动对正,可以实现自动化对正,