
基于扰动观测器和重复控制器的永磁直线同步电动机鲁棒控制.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于扰动观测器和重复控制器的永磁直线同步电动机鲁棒控制.docx
基于扰动观测器和重复控制器的永磁直线同步电动机鲁棒控制摘要:本论文基于扰动观测器和重复控制器,提出了一种针对永磁直线同步电动机的鲁棒控制方法。该方法通过设计扰动观测器,对不确定因素产生的扰动进行观测和补偿,同时采用重复控制器,对周期性扰动进行有效抑制,从而实现对电机的精准控制。在控制器设计上,本文利用Lyapunov函数对闭环系统进行严格的稳定性分析,证明了所提出控制方法的有效性和鲁棒性。关键词:永磁直线同步电动机、鲁棒控制、扰动观测器、重复控制器、Lyapunov函数引言:永磁直线同步电动机具有结构简单
一种基于扰动观测器的永磁直线同步电机.pdf
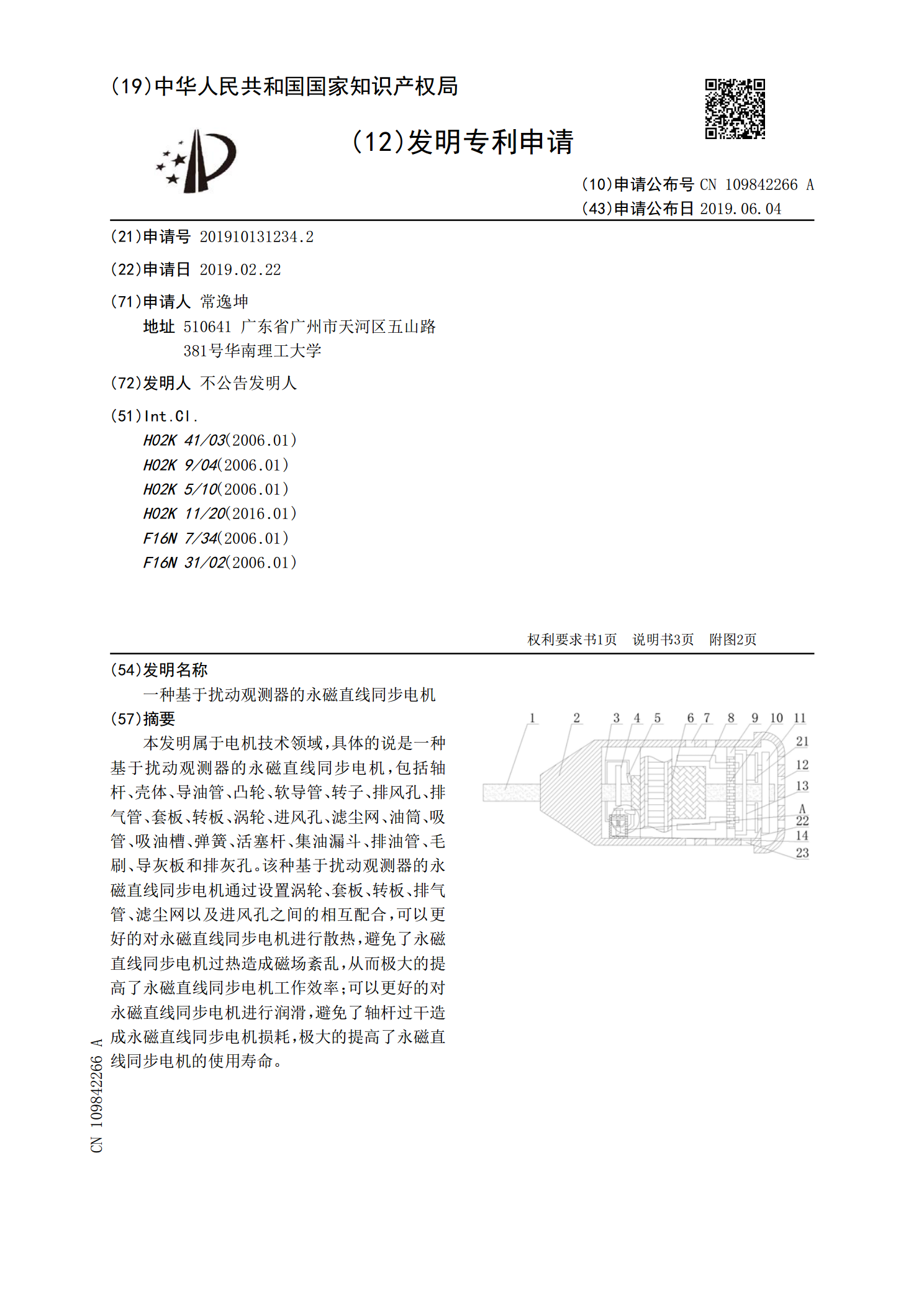
本发明属于电机技术领域,具体的说是一种基于扰动观测器的永磁直线同步电机,包括轴杆、壳体、导油管、凸轮、软导管、转子、排风孔、排气管、套板、转板、涡轮、进风孔、滤尘网、油筒、吸管、吸油槽、弹簧、活塞杆、集油漏斗、排油管、毛刷、导灰板和排灰孔。该种基于扰动观测器的永磁直线同步电机通过设置涡轮、套板、转板、排气管、滤尘网以及进风孔之间的相互配合,可以更好的对永磁直线同步电机进行散热,避免了永磁直线同步电机过热造成磁场紊乱,从而极大的提高了永磁直线同步电机工作效率;可以更好的对永磁直线同步电机进行润滑,避免了轴杆

基于免疫的永磁同步电动机H_∞鲁棒控制器设计.docx
基于免疫的永磁同步电动机H_∞鲁棒控制器设计永磁同步电动机因其高效率、高功率密度和更好的控制性能而日益受到关注。然而,由于外界扰动和参数扰动的影响,永磁同步电动机的控制难度也随之增加。因此,H_∞鲁棒控制器的设计在永磁同步电动机的控制中是非常重要的。1.H_∞鲁棒控制器设计H_∞鲁棒控制器是一种强鲁棒性控制器,可以有效地克服各种扰动和不确定性。设计H_∞鲁棒控制器需要先建立永磁同步电动机的数学模型。永磁同步电动机模型基于矢量控制理论,可以通过Park变换和Clarke变换将三相坐标系转换成直流坐标系。根据

基于谐波抑制和扰动观测器的磁通切换永磁直线电机联合控制方法.docx
基于谐波抑制和扰动观测器的磁通切换永磁直线电机联合控制方法磁通切换永磁直线电机(LTPM)是一种新型、高效、低噪音、低振动的电机。它的运动原理是通过改变电机线圈的磁场方向来控制电机的运转。在实际应用中,LTPM常常使用单一控制策略难以满足工业生产的需求。因此,本文提出了基于谐波抑制和扰动观测器的LTPM联合控制方法,以提高电机性能和控制精度。一、LTPM简介LTPM是一种具有高能效、低噪声、小体积、无需滑动环等优势的直线平移电机。它的结构简单,一般由静止部分(定子)和移动部分(滑块带盖)组成。常见的LTP

外部扰动下空间机器人基于扰动观测器的鲁棒控制.pptx
添加副标题目录PART01PART02空间机器人扰动的来源扰动对空间机器人性能的影响扰动观测器在空间机器人控制中的作用PART03扰动观测器的设计原理鲁棒控制器的设计方法基于扰动观测器的鲁棒控制算法实现PART04评估指标的选取实验平台的搭建与测试鲁棒控制性能的实验验证与结果分析PART05本研究的贡献与局限性对未来研究的建议与展望感谢您的观看