
基于吊放声呐的无人艇搜潜任务规划算法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于吊放声呐的无人艇搜潜任务规划算法.docx
基于吊放声呐的无人艇搜潜任务规划算法基于吊放声呐的无人艇搜潜任务规划算法摘要:无人艇搜潜任务规划是无人系统应用领域的重要研究方向之一。在该任务中,吊放声呐的无人艇负责在海底区域进行潜水搜寻作业。本文综述了当前无人艇搜潜任务规划算法的研究现状,并提出了一种基于声呐探测和目标分析的任务规划算法。该算法通过声呐探测和目标分析相结合,实现了无人艇搜潜任务的高效完成,为无人艇搜潜任务规划领域提供了新的思路和研究方向。关键词:无人艇;搜潜任务规划;声呐探测;目标分析第一章引言无人艇搜潜任务是一项复杂且具有挑战性的任务
直升机CGF实体吊放声呐搜潜的仿真方法及装置.pdf
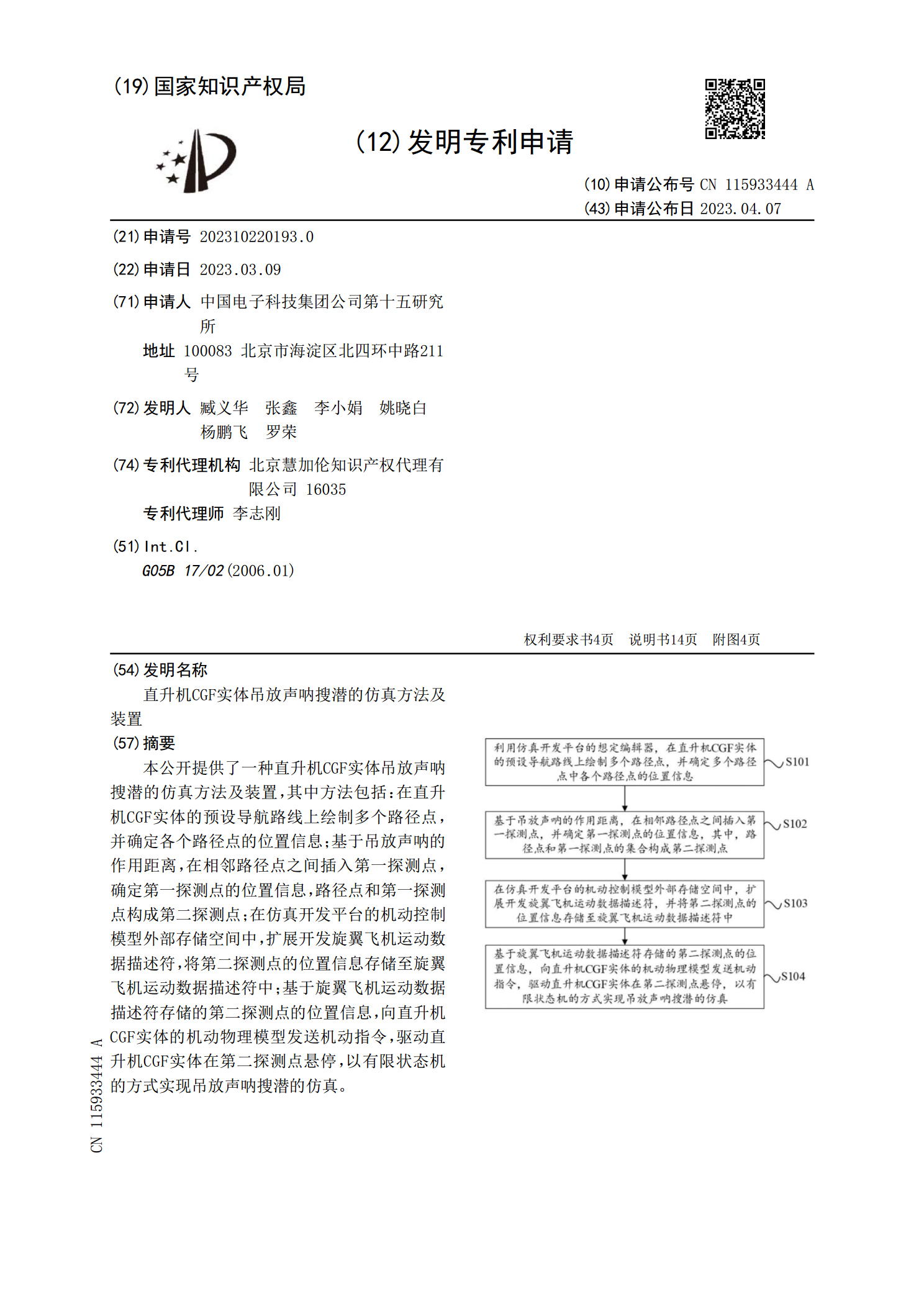
本公开提供了一种直升机CGF实体吊放声呐搜潜的仿真方法及装置,其中方法包括:在直升机CGF实体的预设导航路线上绘制多个路径点,并确定各个路径点的位置信息;基于吊放声呐的作用距离,在相邻路径点之间插入第一探测点,确定第一探测点的位置信息,路径点和第一探测点构成第二探测点;在仿真开发平台的机动控制模型外部存储空间中,扩展开发旋翼飞机运动数据描述符,将第二探测点的位置信息存储至旋翼飞机运动数据描述符中;基于旋翼飞机运动数据描述符存储的第二探测点的位置信息,向直升机CGF实体的机动物理模型发送机动指令,驱动直升机

基于粒子群优化算法的无人艇路径规划.docx
基于粒子群优化算法的无人艇路径规划基于粒子群优化算法的无人艇路径规划摘要:无人艇作为一种新型的智能水面交通工具,其路径规划问题是无人艇导航控制的关键问题之一。针对无人艇路径规划问题的复杂性与困难性,本文提出一种基于粒子群优化算法的路径规划方法,通过模拟粒子在搜索空间中的移动来寻求全局最优解,实现无人艇的高效路径规划。关键词:粒子群优化算法,无人艇,路径规划,全局最优解1.引言随着无人艇技术的快速发展,无人艇在海洋勘探、货运运输、安全监测等领域的应用越来越广泛。无人艇的路径规划问题是指在给定的起点和终点条件

基于量子蚁群算法的无人水面艇航迹规划.docx
基于量子蚁群算法的无人水面艇航迹规划基于量子蚁群算法的无人水面艇航迹规划摘要:无人水面艇(USV)作为一种重要的自主水下机器人,具有广泛的应用前景。在USV运动过程中,航迹规划是一个关键的问题,其目标是在保证水面艇安全的前提下,找到一条最优路径。为了解决这个问题,本文将提出一种基于量子蚁群算法的USV航迹规划方法。量子蚁群算法将结合蚁群算法和量子计算的思想,可以有效地提高USV航迹规划的效果。实验结果表明,该算法能够在保证水面艇安全的前提下,找到一条较优的航迹。第一节引言无人水面艇作为一种具有无人驾驶能力

基于改进RRT算法的无人艇编队路径规划技术.docx
基于改进RRT算法的无人艇编队路径规划技术基于改进RRT算法的无人艇编队路径规划技术摘要:无人艇编队控制是无人艇应用中的一个重要问题,路径规划是其关键技术之一。本文针对无人艇编队路径规划问题,提出了一种改进的RRT(Rapidly-exploringRandomTree)算法。通过对RRT算法的改进,结合无人艇编队的特点,设计了一种适用于无人艇编队的路径规划方法,可以有效解决路径规划中的障碍物避让、航速匹配等问题,提高了编队路径规划的效率和稳定性。通过仿真实验验证了该方法的可行性和有效性。关键词:无人艇编