
基于最大回正力矩的轮-地摩擦因数估计法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于最大回正力矩的轮-地摩擦因数估计法.docx
基于最大回正力矩的轮-地摩擦因数估计法基于最大回正力矩的轮-地摩擦因数估计法摘要:轮-地摩擦因数是机器人运动过程中非常重要的参数之一,对机器人的运动控制和路径规划具有重要的影响。本文介绍了一种基于最大回正力矩的轮-地摩擦因数估计方法。首先,我们对轮-地摩擦力进行了分析,推导出了最大回正力矩与轮-地摩擦因数之间的关系。然后,我们设计了实验装置来测量机器人的最大回正力矩,并通过灵敏度分析来获得轮-地摩擦因数的估计值。最后,我们对该方法进行了实验验证,结果表明该方法能够准确估计轮-地摩擦因数。关键词:轮-地摩擦

基于轮胎回正力矩的路面附着系数估计方法.docx
基于轮胎回正力矩的路面附着系数估计方法基于轮胎回正力矩的路面附着系数估计方法摘要:路面附着系数是指轮胎与道路之间的摩擦力。准确地估计路面附着系数对于车辆运行状态的监控和控制至关重要。轮胎回正力矩是指车辆前轮在转向过程中恢复到前进方向所需的力矩。本文通过分析轮胎回正力矩与路面附着系数之间的关系,提出了一种基于轮胎回正力矩的路面附着系数估计方法。关键词:路面附着系数、轮胎回正力矩、估计方法一、引言路面附着系数是指轮胎与道路之间的摩擦力,是影响车辆行驶稳定性和操控性能的重要参数。因此,准确地估计路面附着系数对于
动量轮摩擦力矩在轨实时估计方法.pdf
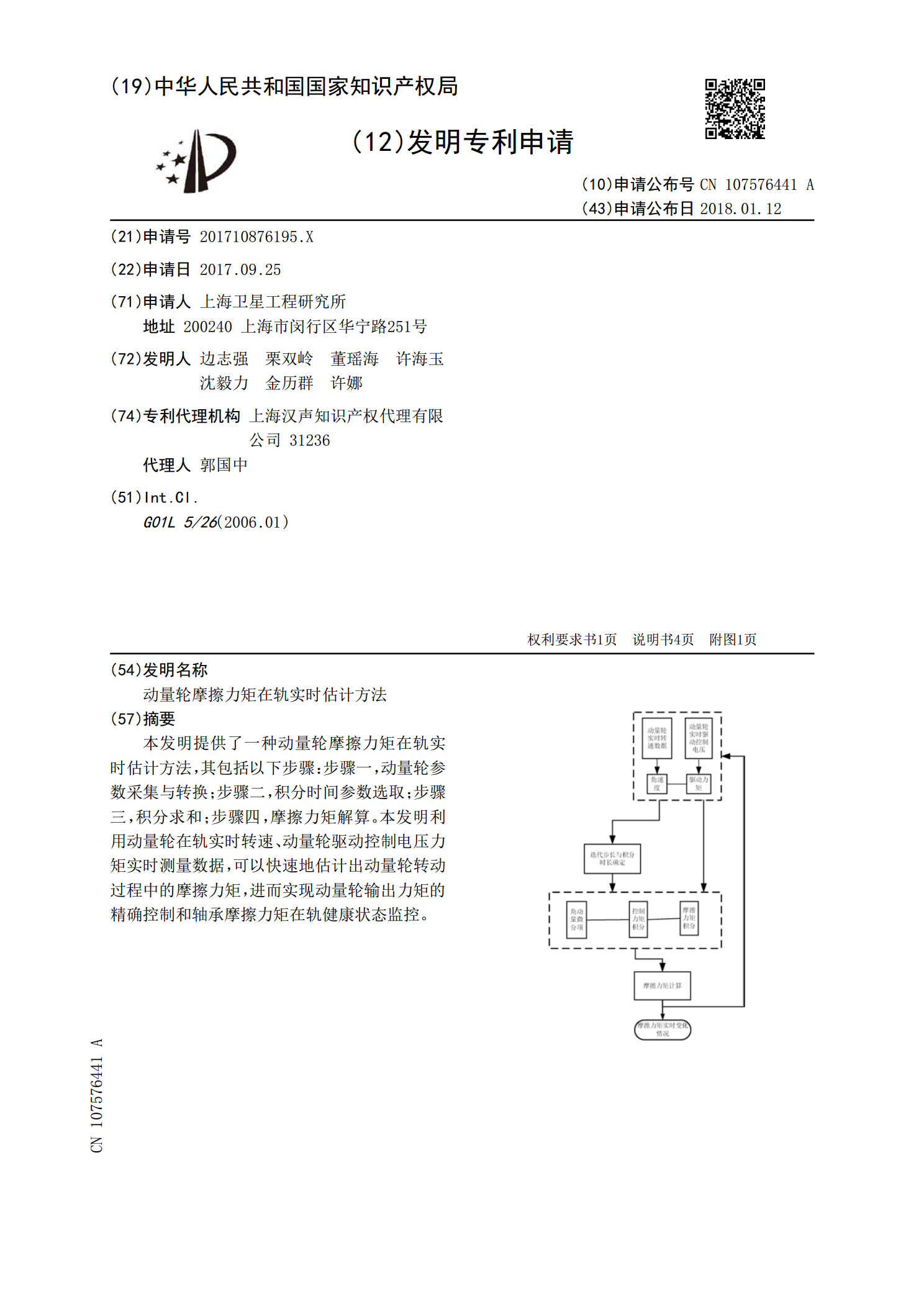
本发明提供了一种动量轮摩擦力矩在轨实时估计方法,其包括以下步骤:步骤一,动量轮参数采集与转换;步骤二,积分时间参数选取;步骤三,积分求和;步骤四,摩擦力矩解算。本发明利用动量轮在轨实时转速、动量轮驱动控制电压力矩实时测量数据,可以快速地估计出动量轮转动过程中的摩擦力矩,进而实现动量轮输出力矩的精确控制和轴承摩擦力矩在轨健康状态监控。

基于回正力矩估计的主动转向理想方向盘转矩设计方法.pdf
本发明公开一种基于回正力矩估计的主动转向理想方向盘转矩设计方法:首先利用传感器得到相关参数,通过整车模型得到汽车的状态参数,输入轮胎模型后求得归一化轮胎侧偏力,将计算结果结合变传动比控制下的前轮转角一起传递给估计器,估计得到回正力矩,然后再通过对汽车行驶状态的判断,设计出此时对应的理想方向盘转矩;本发明在在线估计出实时的回正力矩的基础上,通过汽车在线性范围与非线性范围行驶时前轮回正力矩与前轮转角以及车速间的关系,通过实验数据和驾驶员的转向体验,设计出合理的理想方向盘转矩,力矩的大小可以有效地表征汽车行驶状

动量轮摩擦力矩高精度自适应在线估计方法.pdf
本发明一种动量轮摩擦力矩高精度自适应在线估计方法,以动量轮转速为输入,同时构造灰色预测算法与零阶观测器,对下一时刻的动量轮摩擦力矩进行预测;灰色预测算法与零阶观测器的输出根据动量轮的当前转速进行自适应加权;在灰色预测模型的计算过程中,利用转速均方差自动调整预测步长。本发明克服了直接利用原始转速信息进行摩擦力矩估计的弊端,又避免了额外引入动量轮控制电压或控制电流的开销,而摩擦力矩测量的准确性可有效提高,尤其适用于大转速范围条件下的动量轮摩擦力矩估计。