
基于建筑轮廓的车载和航空LiDAR数据配准方法.pdf

Ro****44


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于建筑轮廓的车载和航空LiDAR数据配准方法.pdf
本发明涉及一种基于建筑轮廓的车载和航空LiDAR数据配准方法,该方法从车载和航空LiDAR数据中分别提取二维建筑轮廓,并通过轮廓线段高程分割法得到车载和航空三维建筑轮廓线段;然后分别从车载和航空三维建筑轮廓线段中选取两对轮廓线段,计算该两对三维轮廓线段的初始转换矩阵;然后对初始转换矩阵进行迭代运算,若车载三维轮廓线段和三维建筑轮廓线段中匹配线段的数量大于指定阈值或者匹配线段的数量最多,则所述初始转换矩阵定义为可靠转换矩阵,利用所述可靠转换矩阵完成车载LiDAR数据和航空LiDAR数据的配准。本发明能够实现

一种基于建筑物轮廓约束的航空与地面LiDAR数据自动配准方法.pdf
一种基于建筑物轮廓约束的航空与地面LiDAR数据自动配准方法:首先分别从航空、地面LiDAR数据中提取建筑物轮廓,简称航空轮廓、地面轮廓;再从航空轮廓、地面轮廓中提取出建筑物角点,简称航空角点、地面角点;然后以航空轮廓与地面轮廓间的匹配度为约束,计算航空角点与地面角点之间初始转换矩阵,并获取初始匹配角点对;最后使用ICP算法计算初始匹配角点对之间的修正转换矩阵,并用初始转换矩阵和修正转换矩阵依次对待匹配地面点云数据进行转换,实现航空与地面LiDAR数据的自动高精度配准。本发明使用轮廓线做约束,在配准的可靠

基于LIDAR和航空影像提取建筑物轮廓的开题报告.docx
基于LIDAR和航空影像提取建筑物轮廓的开题报告1.研究背景城市化进程与人口增长的快速发展,建筑物的数量和面积不断增加。建筑物轮廓的提取是许多应用中必要的基础。传统的手工方法存在效率低、需求劳动力多等问题。而目前基于LIDAR和航空影像的建筑物轮廓提取方法由于具有高效、快速、精度高等优势,成为当前主流的研究方向之一。因此,基于LIDAR和航空影像提取建筑物轮廓的研究具有重要的实际应用价值。2.研究目的与意义本文旨在通过综述和研究现有的基于LIDAR和航空影像提取建筑物轮廓的方法,探究如何实现高效、准确地提

基于LIDAR和航空影像提取建筑物轮廓的综述报告.docx
基于LIDAR和航空影像提取建筑物轮廓的综述报告随着遥感技术的快速发展,各种遥感技术在不同领域中都具有广泛的应用。在城市规划、土地利用、安全监测等方面,建筑物的轮廓提取是一个重要的任务,因为它关系到建筑物的结构、密度、高度等信息。建筑物轮廓提取是一项复杂而困难的任务,但随着LIDAR和航空影像技术的发展,这一任务变得更加容易。LIDAR(激光雷达)可以测量地球表面的高程信息,这使得它成为一个重要的遥感工具。LIDAR通过发射激光束并记录该激光束的反射时间来测量地面高程信息。激光束在穿过建筑物时也会反射回来
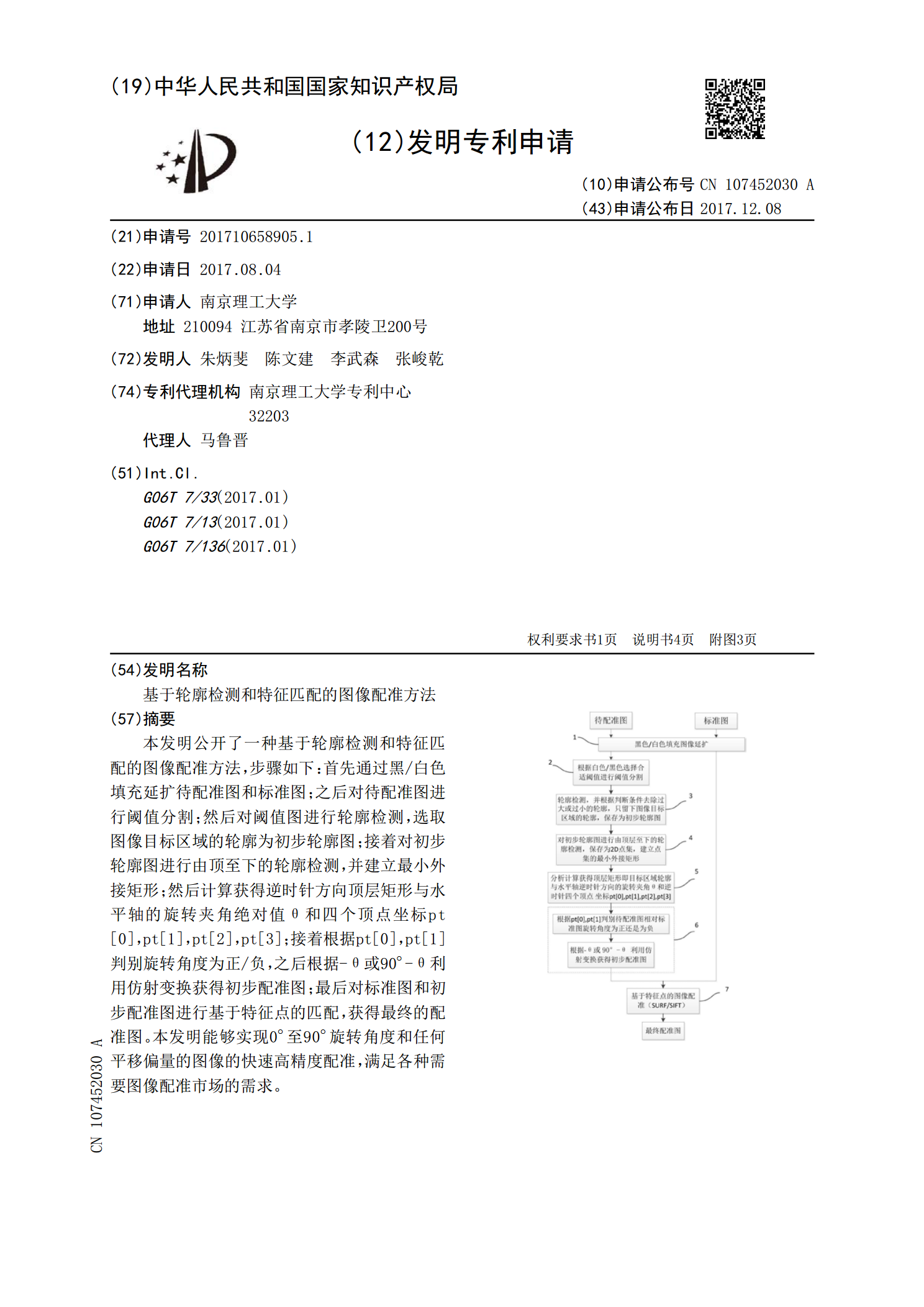
基于轮廓检测和特征匹配的图像配准方法.pdf
本发明公开了一种基于轮廓检测和特征匹配的图像配准方法,步骤如下:首先通过黑/白色填充延扩待配准图和标准图;之后对待配准图进行阈值分割;然后对阈值图进行轮廓检测,选取图像目标区域的轮廓为初步轮廓图;接着对初步轮廓图进行由顶至下的轮廓检测,并建立最小外接矩形;然后计算获得逆时针方向顶层矩形与水平轴的旋转夹角绝对值θ和四个顶点坐标pt[0],pt[1],pt[2],pt[3];接着根据pt[0],pt[1]判别旋转角度为正/负,之后根据‑θ或90°‑θ利用仿射变换获得初步配准图;最后对标准图和初步配准图进行基于