
确定模型水轮机转轮叶片汽蚀发生的方法.pdf

是你****馨呀


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

确定模型水轮机转轮叶片汽蚀发生的方法.pdf
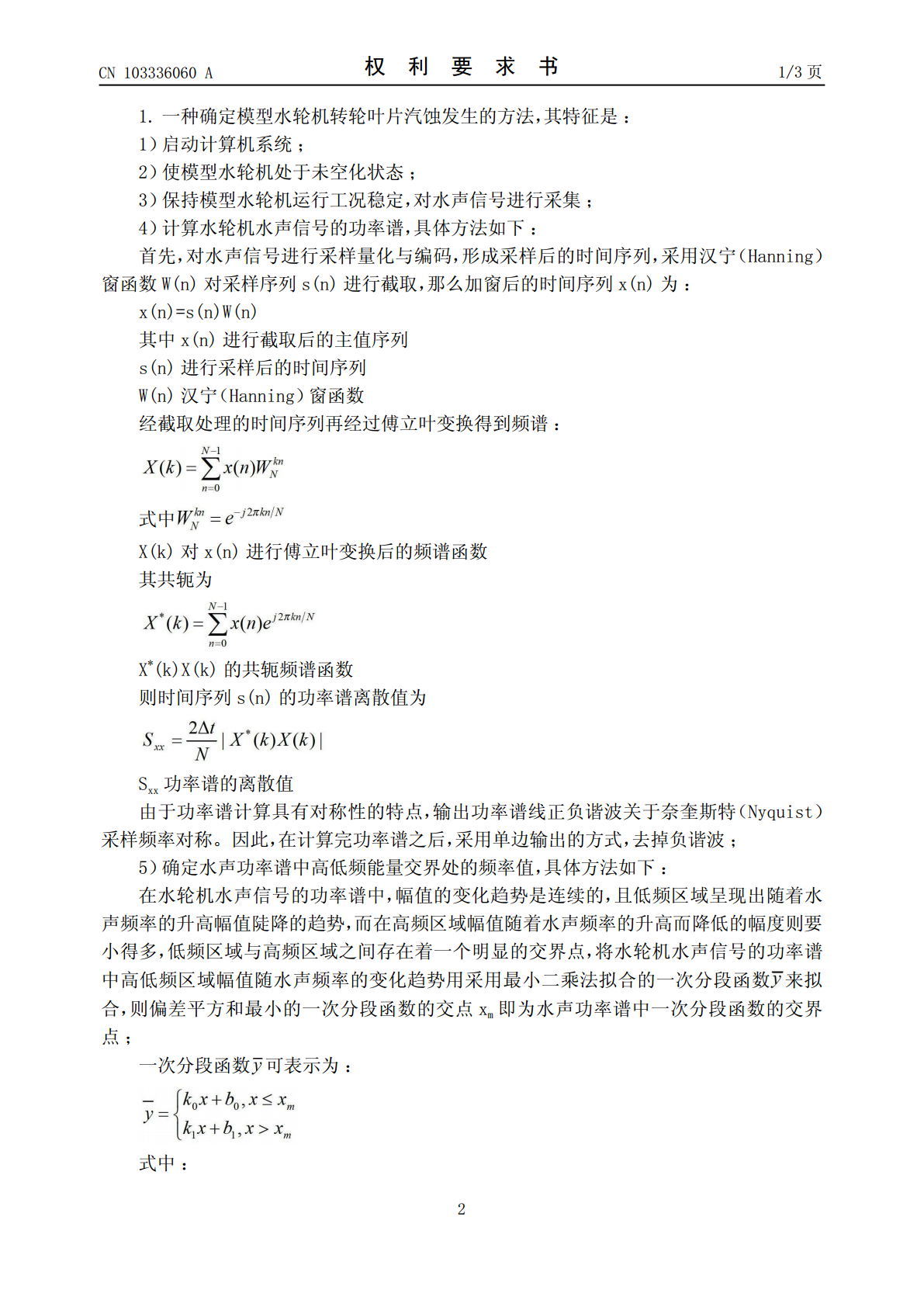
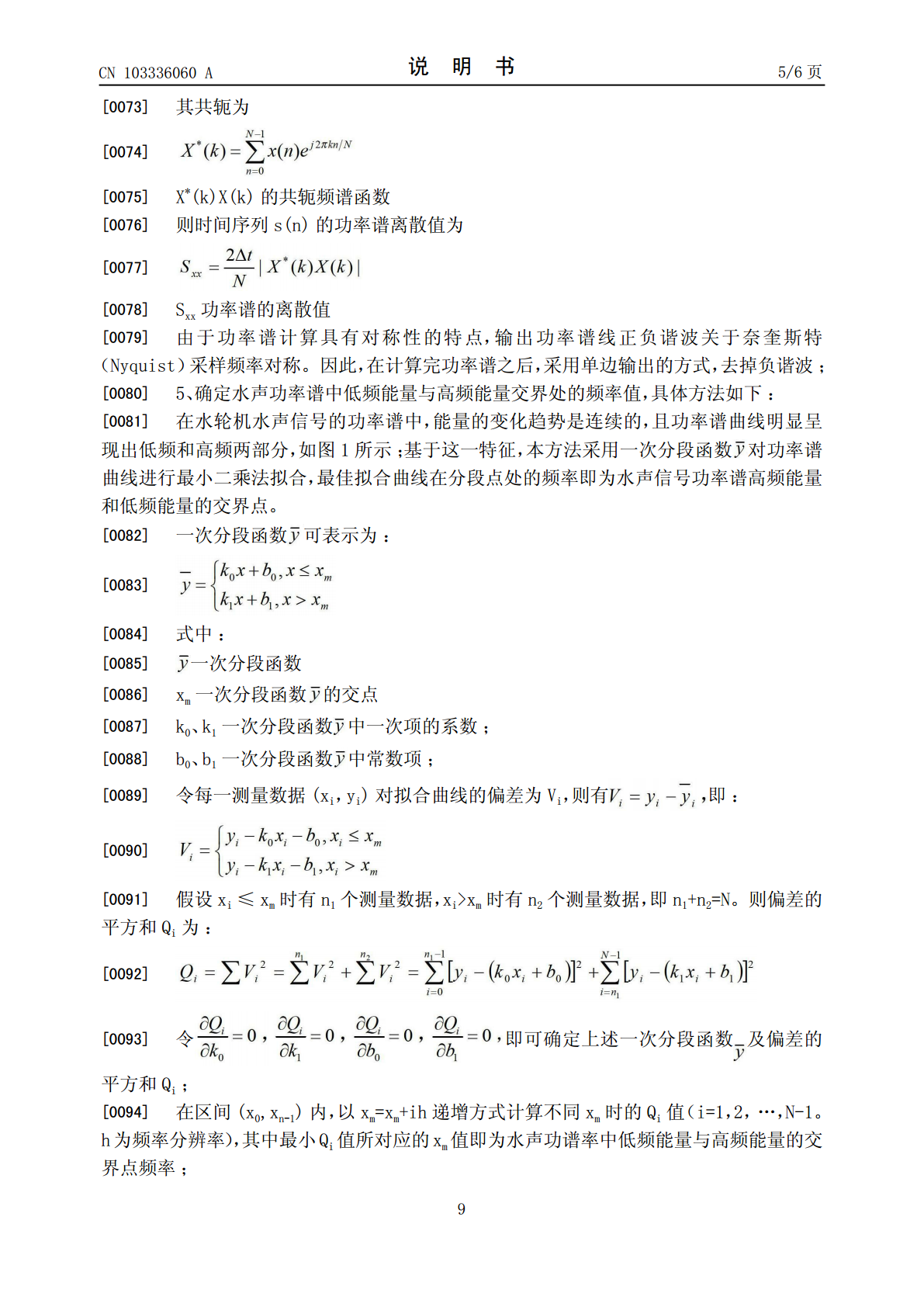
一种确定模型水轮机转轮叶片汽蚀发生的方法涉及水轮机转轮叶片汽蚀发生的判别领域。通过分析水声信号高低频能量在分界点处拟合曲线夹角随空化系数的变化趋势来判断模型水轮机初生空化。在获取水轮机转轮的声波信号后,通过一次分段函数拟合确定水声功率谱中低频能量与高频能量交界处的频率值,并在此基础上计算交界点处分段函数夹角随空化系数的变化趋势,当该夹角值出现局部最大值时,水轮机初生汽蚀系数随之确定。该发明完成了水轮机汽蚀发生从人工甄别到智能识别的跨越。
确定模型水轮机转轮间隙汽蚀的声学方法.pdf
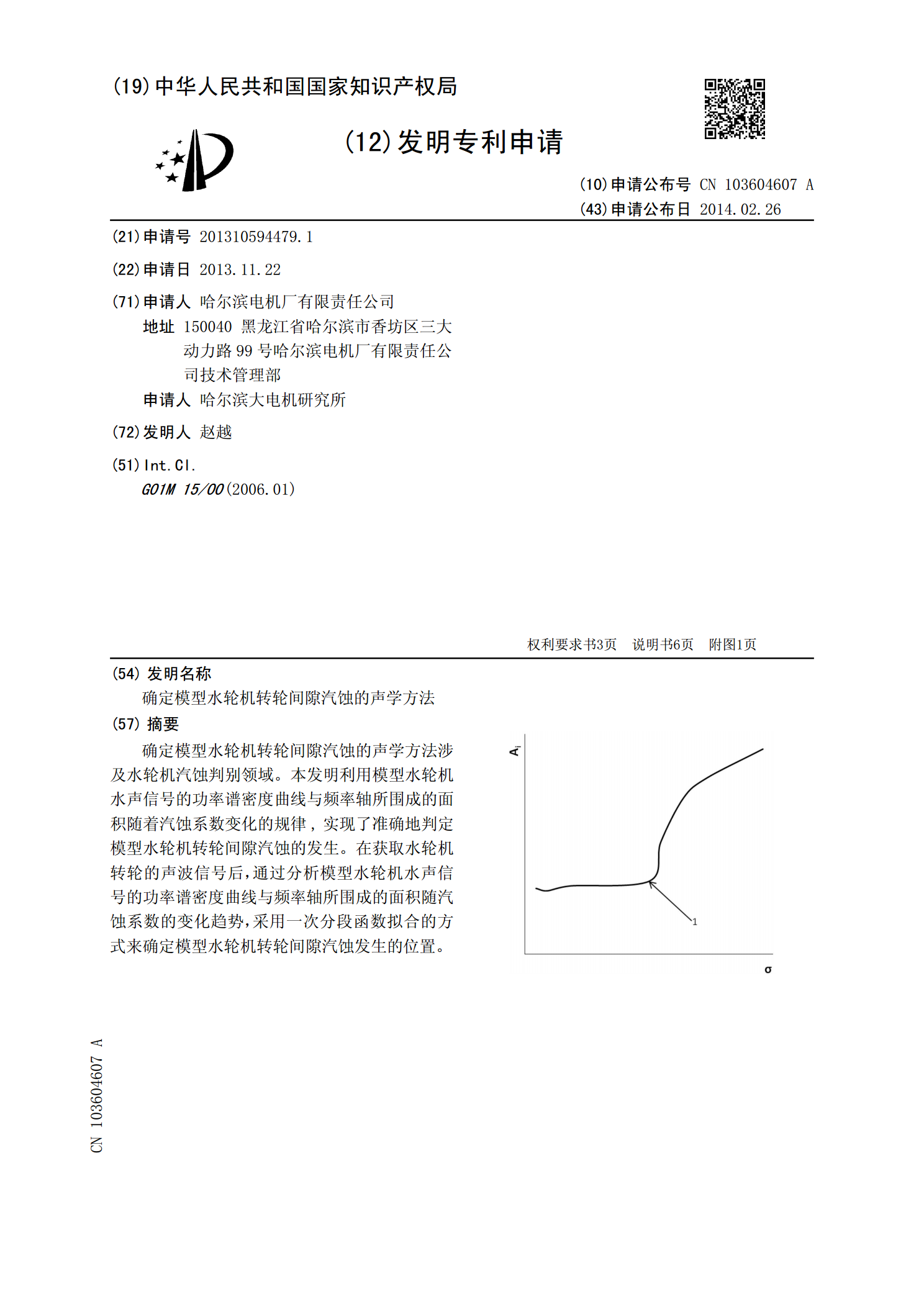
确定模型水轮机转轮间隙汽蚀的声学方法涉及水轮机汽蚀判别领域。本发明利用模型水轮机水声信号的功率谱密度曲线与频率轴所围成的面积随着汽蚀系数变化的规律,实现了准确地判定模型水轮机转轮间隙汽蚀的发生。在获取水轮机转轮的声波信号后,通过分析模型水轮机水声信号的功率谱密度曲线与频率轴所围成的面积随汽蚀系数的变化趋势,采用一次分段函数拟合的方式来确定模型水轮机转轮间隙汽蚀发生的位置。

确定模型水轮机转轮止漏环汽蚀的声学方法.pdf
确定模型水轮机转轮止漏环汽蚀的声学方法涉及水轮机汽蚀判别领域。本发明利用表征水声信号功率谱中能量分布规律的三次分段函数与实际测量数据偏差的平方和随汽蚀系数变化的趋势,实现了准确地判定模型水轮机转轮止漏环汽蚀的发生。在获取水轮机转轮的声波信号后,通过分析水声信号功率谱中能量分布规律的三次分段函数与实际测量数据间偏差的平方和随汽蚀系数的变化趋势,采用一次分段函数拟合的方式来确定模型水轮机转轮止漏环汽蚀发生的位置。
耐磨抗汽蚀的水轮机转轮及叶片.pdf
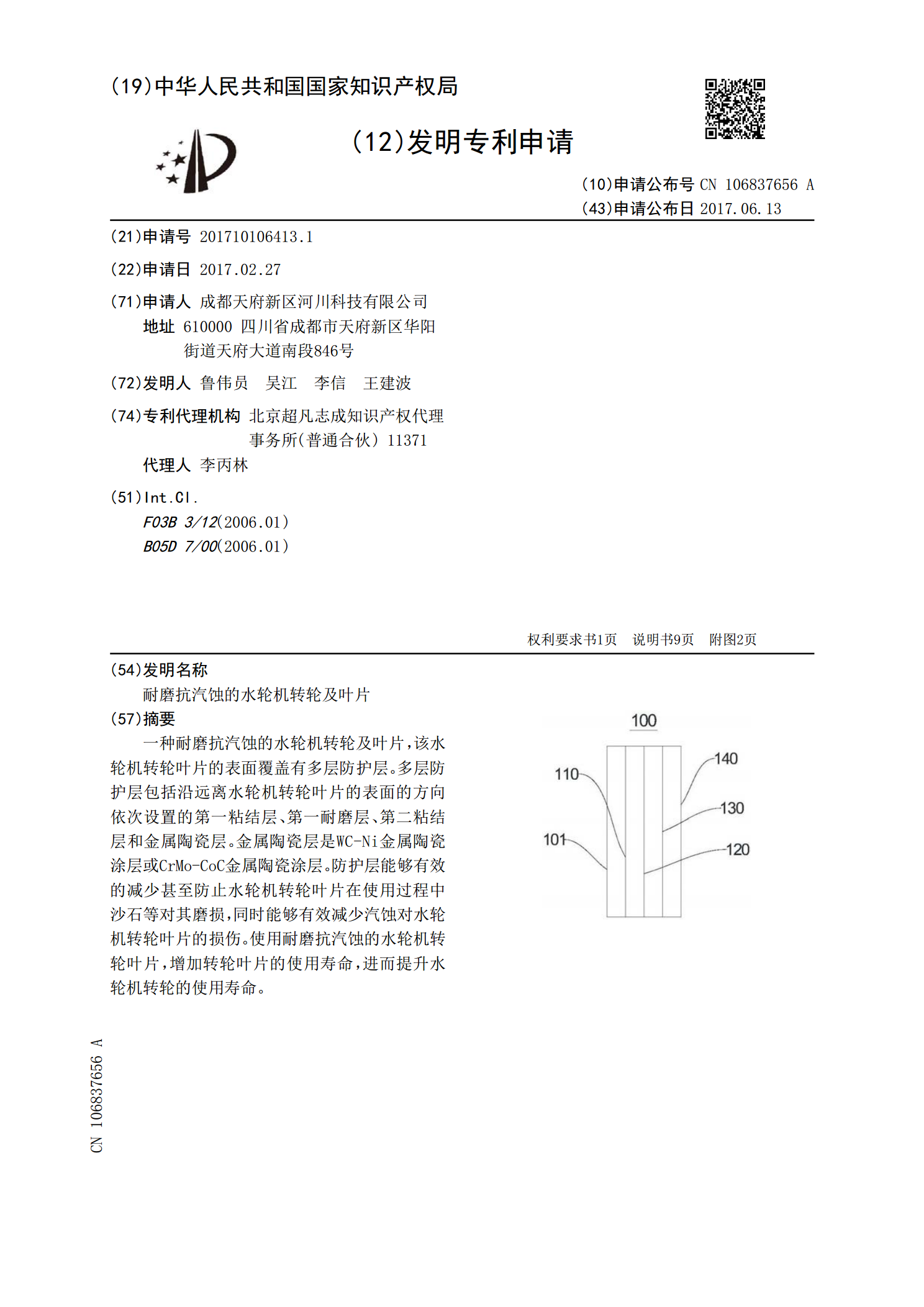
一种耐磨抗汽蚀的水轮机转轮及叶片,该水轮机转轮叶片的表面覆盖有多层防护层。多层防护层包括沿远离水轮机转轮叶片的表面的方向依次设置的第一粘结层、第一耐磨层、第二粘结层和金属陶瓷层。金属陶瓷层是WC‑Ni金属陶瓷涂层或CrMo‑CoC金属陶瓷涂层。防护层能够有效的减少甚至防止水轮机转轮叶片在使用过程中沙石等对其磨损,同时能够有效减少汽蚀对水轮机转轮叶片的损伤。使用耐磨抗汽蚀的水轮机转轮叶片,增加转轮叶片的使用寿命,进而提升水轮机转轮的使用寿命。
确定模型水轮机转轮叶片空蚀起始点的方法.pdf
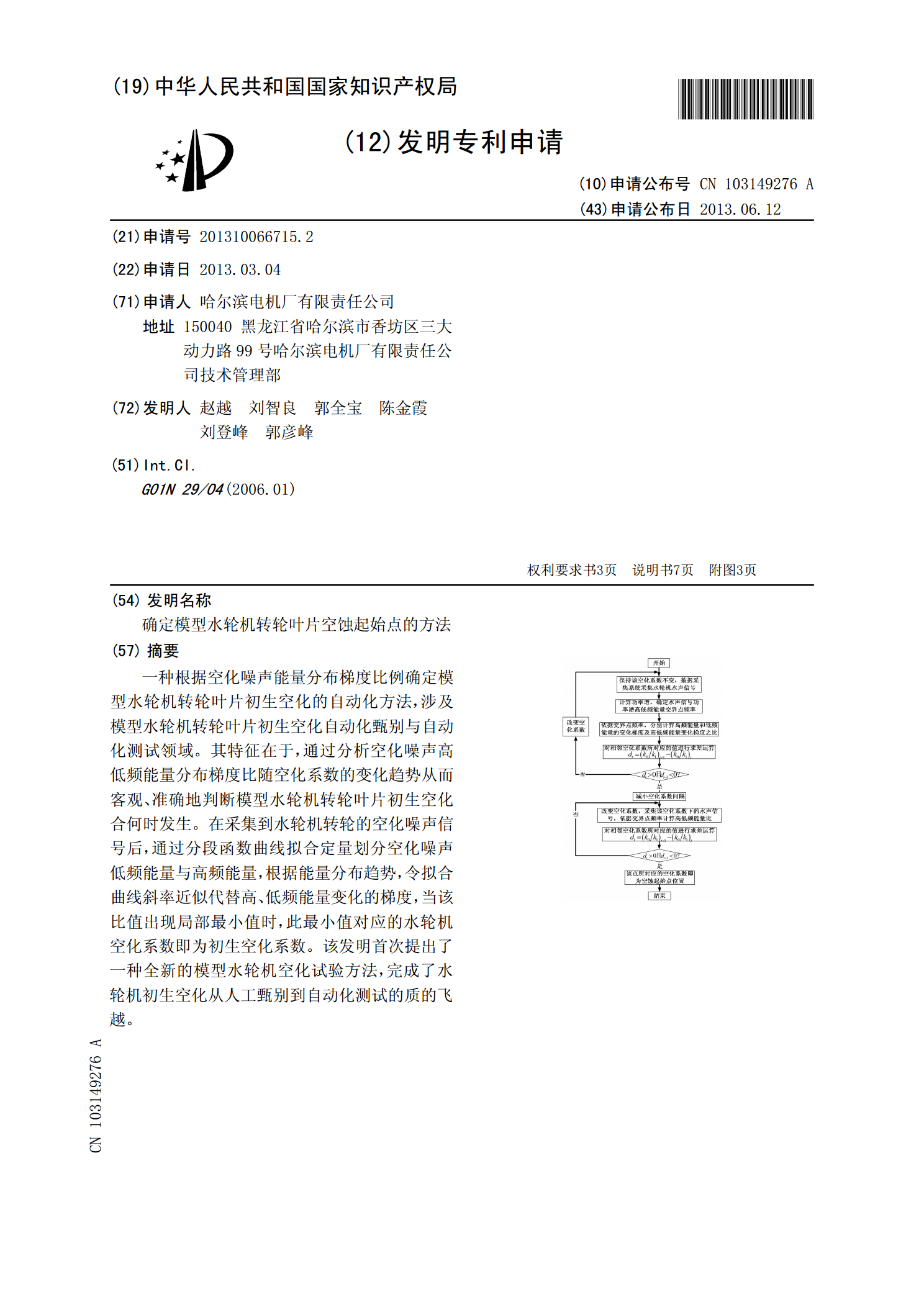
一种根据空化噪声能量分布梯度比例确定模型水轮机转轮叶片初生空化的自动化方法,涉及模型水轮机转轮叶片初生空化自动化甄别与自动化测试领域。其特征在于,通过分析空化噪声高低频能量分布梯度比随空化系数的变化趋势从而客观、准确地判断模型水轮机转轮叶片初生空化合何时发生。在采集到水轮机转轮的空化噪声信号后,通过分段函数曲线拟合定量划分空化噪声低频能量与高频能量,根据能量分布趋势,令拟合曲线斜率近似代替高、低频能量变化的梯度,当该比值出现局部最小值时,此最小值对应的水轮机空化系数即为初生空化系数。该发明首次提出了一种全