
基于加速度传感器的机器人学习控制.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于加速度传感器的机器人学习控制.docx
基于加速度传感器的机器人学习控制摘要本篇论文介绍了一种基于加速度传感器的机器人学习控制方法。该方法利用加速度传感器获取机器人的运动数据,并通过机器学习算法训练机器人的控制模型,以实现机器人的自主控制。我们在实验室环境下进行了一系列实验,结果表明该方法能够有效地提高机器人的控制精度和鲁棒性,具有广泛的应用前景。关键词:加速度传感器,机器人学习控制,控制精度,鲁棒性,应用前景引言机器人控制是机器人技术的核心问题之一。随着机器人应用领域的不断扩大,机器人控制也受到了越来越广泛的关注。在传统的机器人控制方法中,通
基于加速度传感器的机器人行为检测系统及方法.pdf
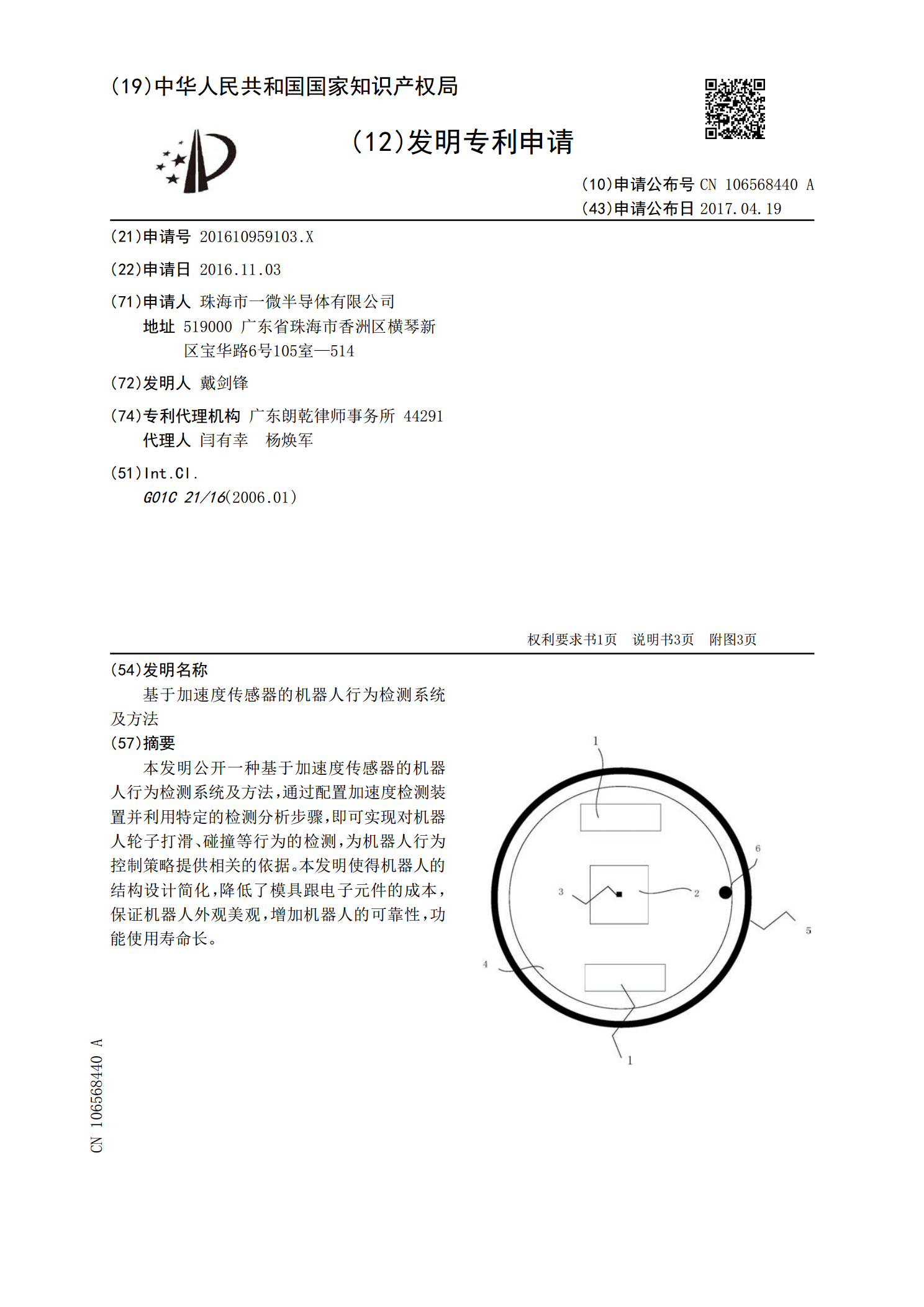
本发明公开一种基于加速度传感器的机器人行为检测系统及方法,通过配置加速度检测装置并利用特定的检测分析步骤,即可实现对机器人轮子打滑、碰撞等行为的检测,为机器人行为控制策略提供相关的依据。本发明使得机器人的结构设计简化,降低了模具跟电子元件的成本,保证机器人外观美观,增加机器人的可靠性,功能使用寿命长。

【论文】基于加速度传感器的小车控制与坡道识别.pdf
基于加速度传感器的小车控制与坡道识别方兴郭思明马明煌指导老师:王冰(速度之星队)摘要实时获取小车加速度,从而更加全面的获取小车的运行状态,为控制的流畅性和更好的路况识别提供了可能。关键词加速度传感器;自动控制;路况识别;向心加速度;重力加速度前言在第一届比赛中,我们注意到许多队都使用了速度传感器来对小车速度进行实时地监控,并取得了不错的效果,在第二届比赛中,我们不仅对速度进行了监控,并且进一步的,我们使用了加速度传感器来监控小车的加速度,这样可以更加精确地知道小车的运行状态,而且可以通过对某个方向加速度的

赵彤彤_基于三轴重力加速度传感器的机器人状态检测_赵彤彤_基于三轴重力加速度传感器的机器人状态检测.docx
基于三轴重力加速度传感器的机器人状态检测学生姓名:赵彤彤指导教师姓名:裴东学生届别:2016届专业:电气工程及其自动化班级:2016级电气工程及其自动化专业1班学号:201672050137摘要本设计以STM32单片机为主控制系统,采用ADXL345三轴重力加速度传感器实现机器人不同状态的检测,如上坡、下坡、跌倒等。机器人硬件由主控制器模块、电源模块、传感器模块及其他硬件自主搭建。通过统计三轴重力加速度传感器ADXL345的X轴、Y轴、Z轴的信号,获得机器人状态突变瞬间的三轴加速度数据信息,从而实现机器人

赵彤彤_基于三轴重力加速度传感器的机器人状态检测_赵彤彤_基于三轴重力加速度传感器的机器人状态检测.docx
基于三轴重力加速度传感器的机器人状态检测学生姓名:赵彤彤指导教师姓名:裴东学生届别:2016届专业:电气工程及其自动化班级:2016级电气工程及其自动化专业1班学号:201672050137摘要本设计以STM32单片机为主控制系统采用ADXL345三轴重力加速度传感器实现机器人不同状态的检测如上坡、下坡、跌倒等。机器人硬件由主控制器模块、电源模块、传感器模块及其他硬件自主搭建。通过统计三轴重力加速度传感器ADXL345的X轴、Y轴、Z轴的信号获得机器人状态突变瞬间的三轴加速度数据信息从