
利用正射影像生成立体辅助影像方法比较.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

利用正射影像生成立体辅助影像方法比较.docx
利用正射影像生成立体辅助影像方法比较正射影像生成立体辅助影像是在数字图像处理领域中的重要应用之一,其可以将原本单视角的图像转化为多视角的图像,增加了立体感,方便后续的三维建模、场景重建等应用。本文将分别从图像匹配、三维重建、立体匹配和精度评估四个方面阐述正射影像生成立体辅助影像的方法比较。一、图像匹配图像匹配是生成立体辅助影像的第一步,它是实现三维重建的基础。传统的图像匹配方法是基于特征点的匹配,其中最经典的是SIFT算法。但是这种算法存在着计算量大、耗时长、对图像质量敏感等问题,无法处理大规模数据。近年

利用生成正射影像评价DEM之研究.ppt
報告流程前言前言(續)實驗方法正射影像之生成正射影像之生成(續)正射影像之生成示意圖標準化互相關法(NormalizedCrossCorrelation,NCC)正射影像對之匹配實驗成果與分析-實驗資料DEM及原始影像的對照正射影像正射影像之分析DEM錯誤量與灰階差異比較正確DEM取樣出差異很大的灰階錯誤DEM取樣到相似灰階實驗成果實驗成果-第2組實驗成果-第4組實驗成果-第7組成果分析實驗成果二實驗成果-第3組成果分析(續)特例之探討特例之探討(續)結論結論(續)參考文獻

利用生成正射影像评价DEM之研究.ppt
報告流程前言前言(續)實驗方法正射影像之生成正射影像之生成(續)正射影像之生成示意圖標準化互相關法(NormalizedCrossCorrelation,NCC)正射影像對之匹配實驗成果與分析-實驗資料DEM及原始影像的對照正射影像正射影像之分析DEM錯誤量與灰階差異比較正確DEM取樣出差異很大的灰階錯誤DEM取樣到相似灰階實驗成果實驗成果-第2組實驗成果-第4組實驗成果-第7組成果分析實驗成果二實驗成果-第3組成果分析(續)特例之探討特例之探討(續)結論結論(續)參考文獻
真正射影像生成方法和装置.pdf
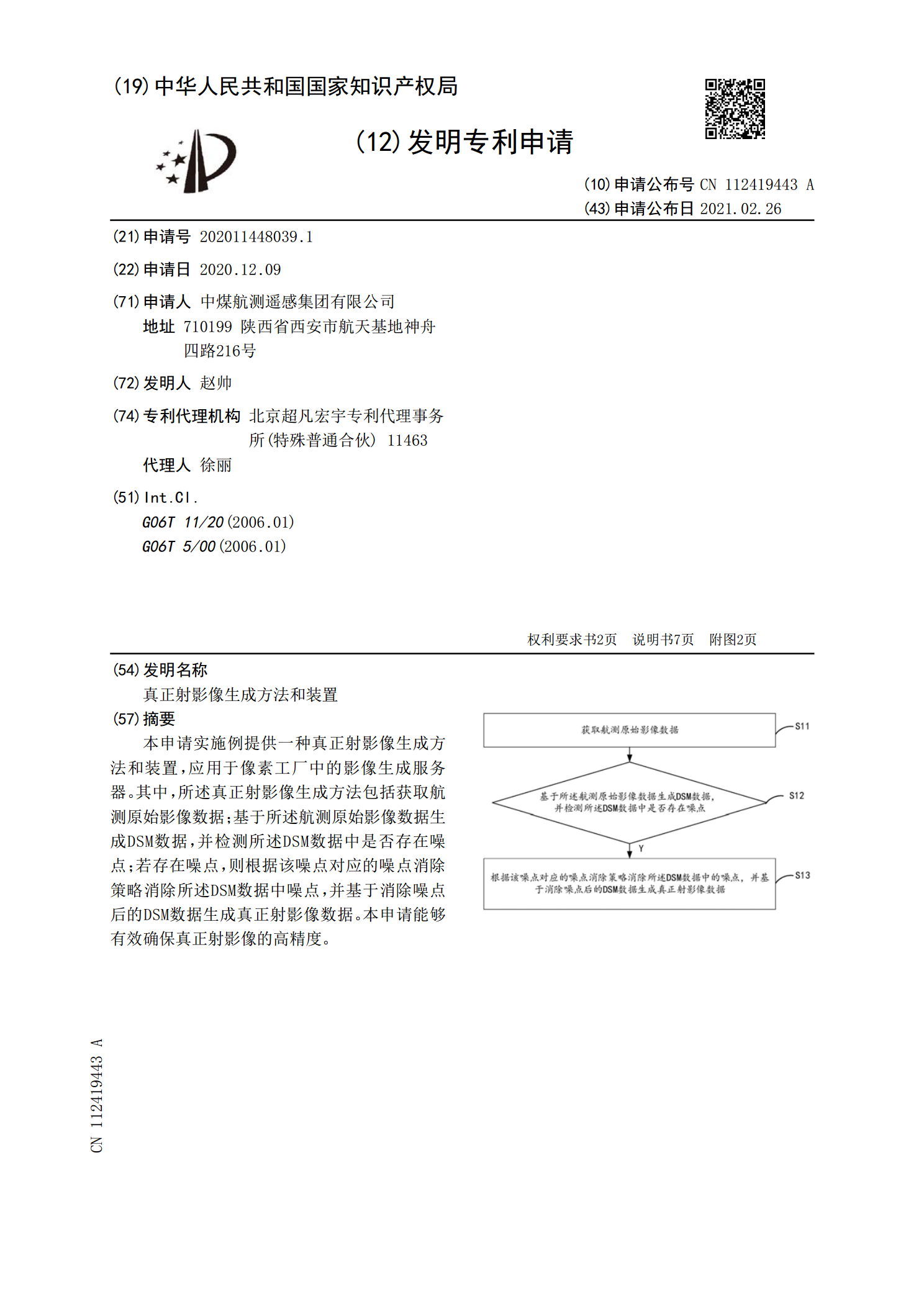
本申请实施例提供一种真正射影像生成方法和装置,应用于像素工厂中的影像生成服务器。其中,所述真正射影像生成方法包括获取航测原始影像数据;基于所述航测原始影像数据生成DSM数据,并检测所述DSM数据中是否存在噪点;若存在噪点,则根据该噪点对应的噪点消除策略消除所述DSM数据中噪点,并基于消除噪点后的DSM数据生成真正射影像数据。本申请能够有效确保真正射影像的高精度。

一种斜平行投影生成立体辅助影像的方法.docx
一种斜平行投影生成立体辅助影像的方法概述立体辅助影像是现代医学影像诊断的重要工具之一。与平面影像相比,立体辅助影像更能展示图像的立体感与逼真感,有助于医生更准确地诊断、手术等。在立体辅助影像技术中,斜平行投影是一种重要的生成方法。本文将介绍斜平行投影生成立体辅助影像的原理、步骤和应用。斜平行投影的原理斜平行投影是一种生成立体辅助影像的投影方法,它与传统的正向投影相比,具有以下优点:1.可以在一个平面上同时显示整个物体。2.保持了物体的比例和形状。3.投影线是平行的,易于计算和操作。斜平行投影的原理是将物体