
ADAMS与Matlab联合仿真.docx

快乐****蜜蜂


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

ADAMS与Matlab联合仿真.docx
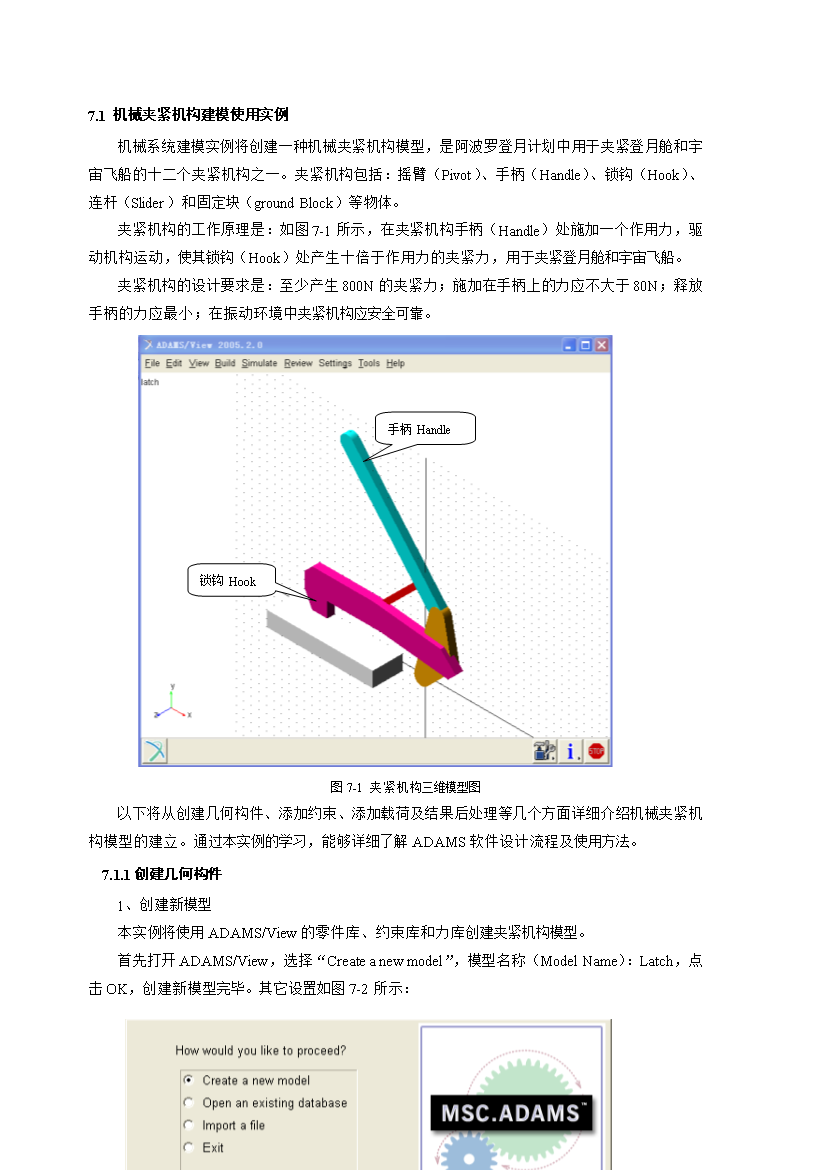
机械夹紧机构建模使用实例机械系统建模实例将创建一种机械夹紧机构模型,是阿波罗登月计划中用于夹紧登月舱和宇宙飞船的十二个夹紧机构之一。夹紧机构包括:摇臂(Pivot)、手柄(Handle)、锁钩(Hook)、连杆(Slider)和固定块(groundBlock)等物体。夹紧机构的工作原理是:如图7-1所示,在夹紧机构手柄(Handle)处施加一个作用力,驱动机构运动,使其锁钩(Hook)处产生十倍于作用力的夹紧力,用于夹紧登月舱和宇宙飞船。夹紧机构的设计要求是:至少产生800N的夹紧力;施加在手柄上的力应不

ADAMS与Matlab联合仿真例子.docx
ADAMS/Controls使用实例本实例以MATLAB作为外部控制程序,以偏心连杆模型为例,讲解ADAMS与MATLAB的联合仿真过程。主要包括创建机械系统模型、模型参数设置、建立MATLAB控制模型以及结果后处理四个步骤。机械模型建立、模型参数设置这两步为了导出一个可在MATLAB软件Simulink中使用的模块,这个模块包含了所建立ADAMS模型的信息参数,并有输入输出接口。利用这个模块在MALTAB中建立控制系统,就可以控制ADAMS模型,在仿真结束后,可以直接在MATLAB中得到所需的数据结果进

ADAMS与Matlab联合仿真要点.docx
机械夹紧机构建模使用实例机械系统建模实例将创建一种机械夹紧机构模型,是阿波罗登月计划中用于夹紧登月舱和宇宙飞船的十二个夹紧机构之一。夹紧机构包括:摇臂(Pivot)、手柄(Handle)、锁钩(Hook)、连杆(Slider)和固定块(groundBlock)等物体。夹紧机构的工作原理是:如图7-1所示,在夹紧机构手柄(Handle)处施加一个作用力,驱动机构运动,使其锁钩(Hook)处产生十倍于作用力的夹紧力,用于夹紧登月舱和宇宙飞船。夹紧机构的设计要求是:至少产生800N的夹紧力;施加在手柄上的力应不

adams_matlab联合仿真[资料].ppt
LearningMSC.ADAMS/ControlswithMATLAB1、基于Matlab的控制系统设计简介2、ADAMS/Controls控制系统设计流程3、例子——双杆的控制系统设计4、例子——倒立单摆的控制系统设计基于Matlab的控制系统设计V例:倒立单摆的PID控制系统设计摆杆重心的水平运动方程:由此,得单级倒立摆的方程:则建立倒立单摆的状态方程为:齿割轧疾咕紧锭申泼上街翁纠陨泡麻流播齐卢该芹茁买导苏龄佳诣伦丑韶adams_matlab联合仿真adams_matlab联合仿真ADAMS/Con
ADAMS与Matlab联合仿真文档 精品资料.doc
机械夹紧机构建模使用实例机械系统建模实例将创建一种机械夹紧机构模型,是阿波罗登月计划中用于夹紧登月舱和宇宙飞船的十二个夹紧机构之一。夹紧机构包括:摇臂(Pivot)、手柄(Handle)、锁钩(Hook)、连杆(Slider)和固定块(groundBlock)等物体。夹紧机构的工作原理是:如图7-1所示,在夹紧机构手柄(Handle)处施加一个作用力,驱动机构运动,使其锁钩(Hook)处产生十倍于作用力的夹紧力,用于夹紧登月舱和宇宙飞船。夹紧机构的设计要求是:至少产生800N的夹紧力;施加在手柄上的力应不