
adams_matlab联合仿真[资料].ppt

yy****24

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共70页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

adams_matlab联合仿真[资料].ppt
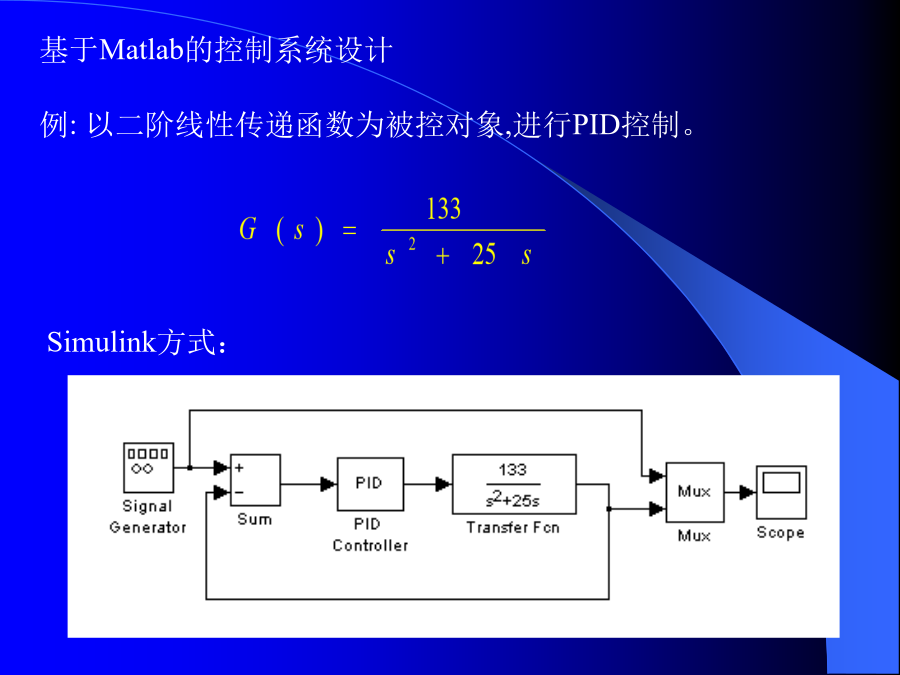
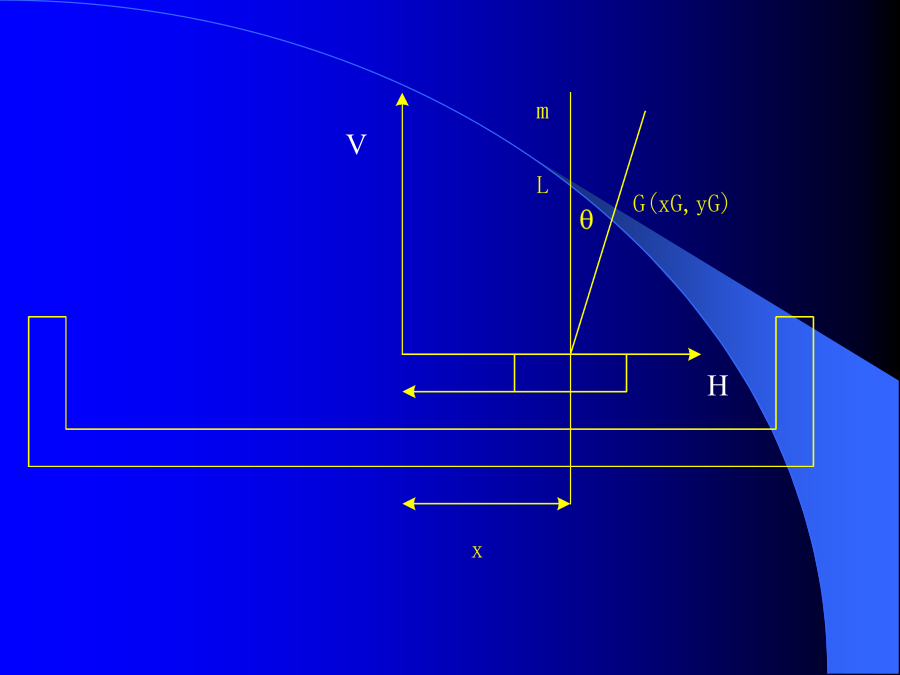
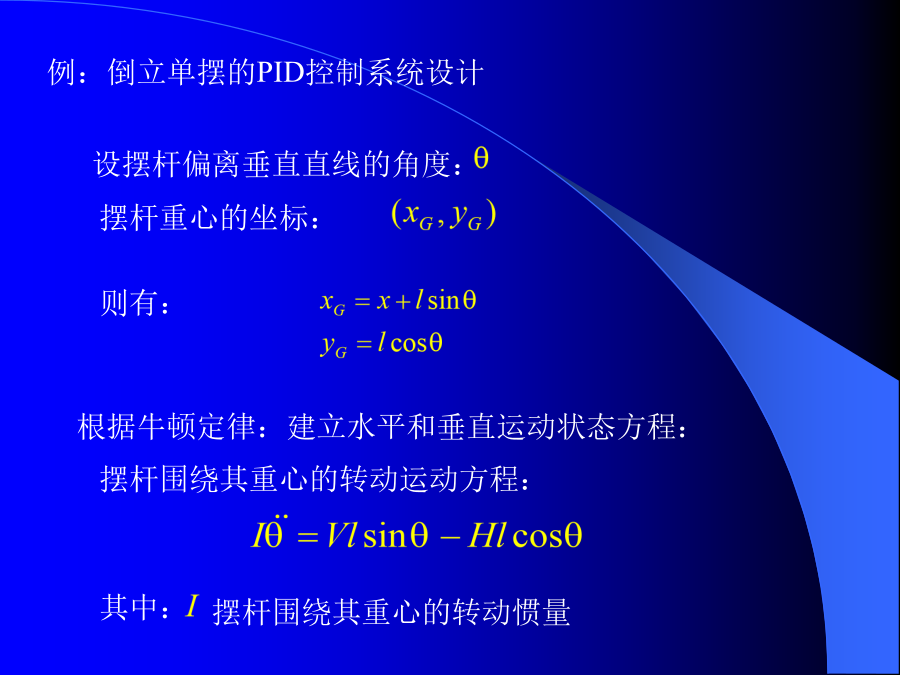
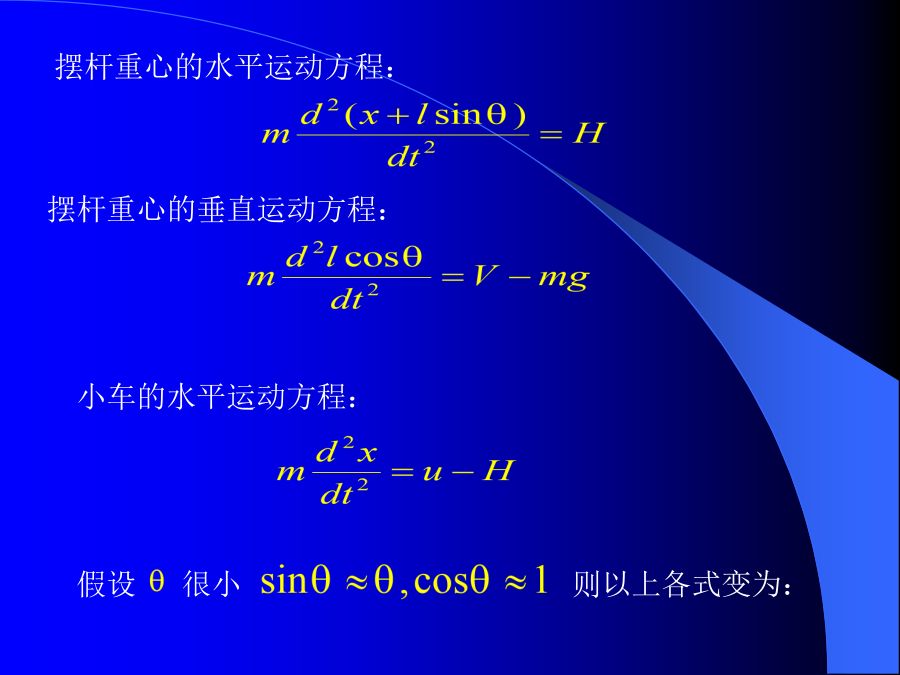
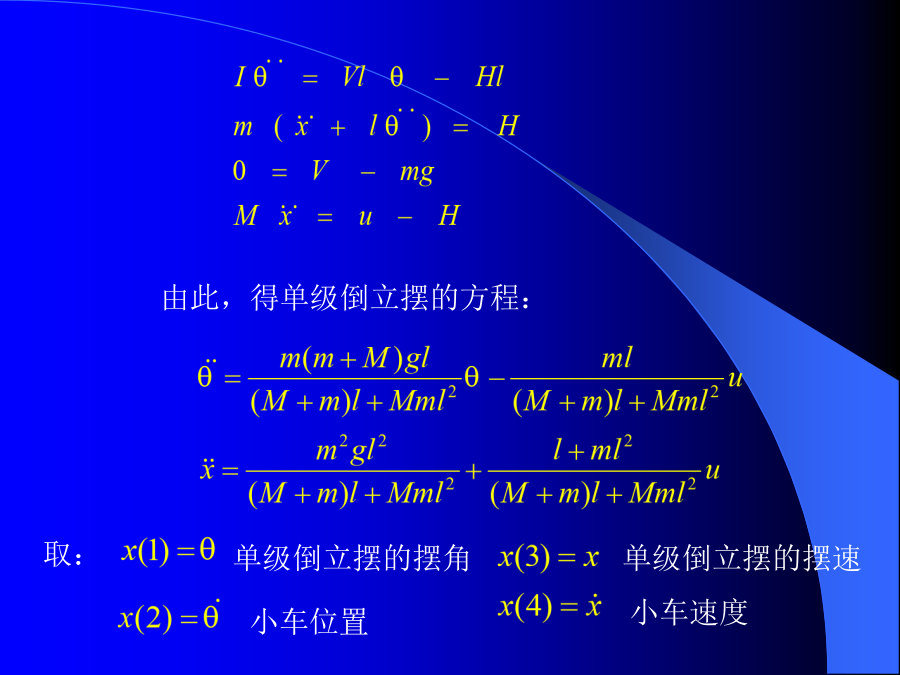
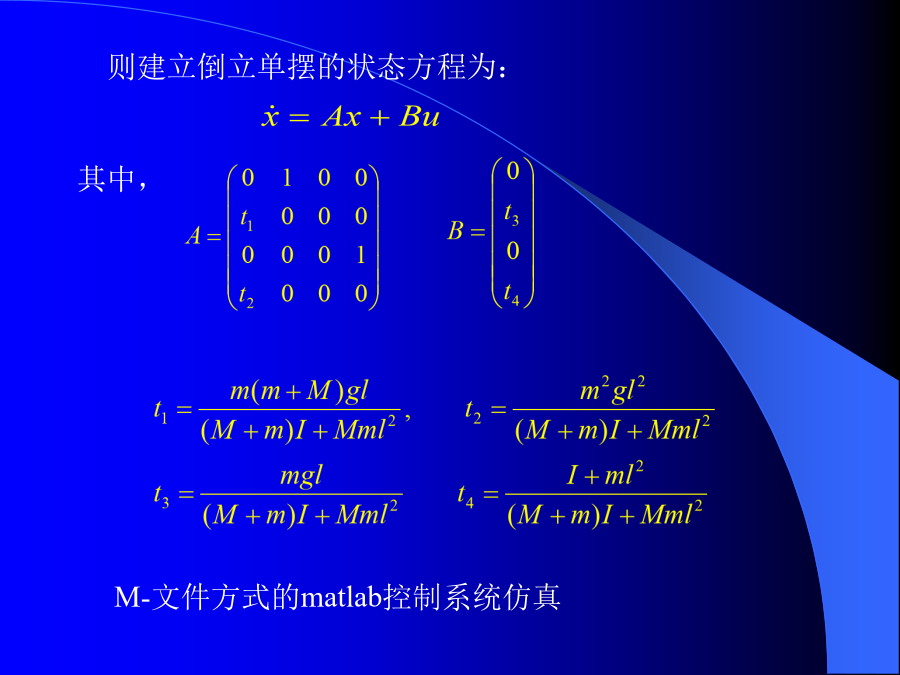
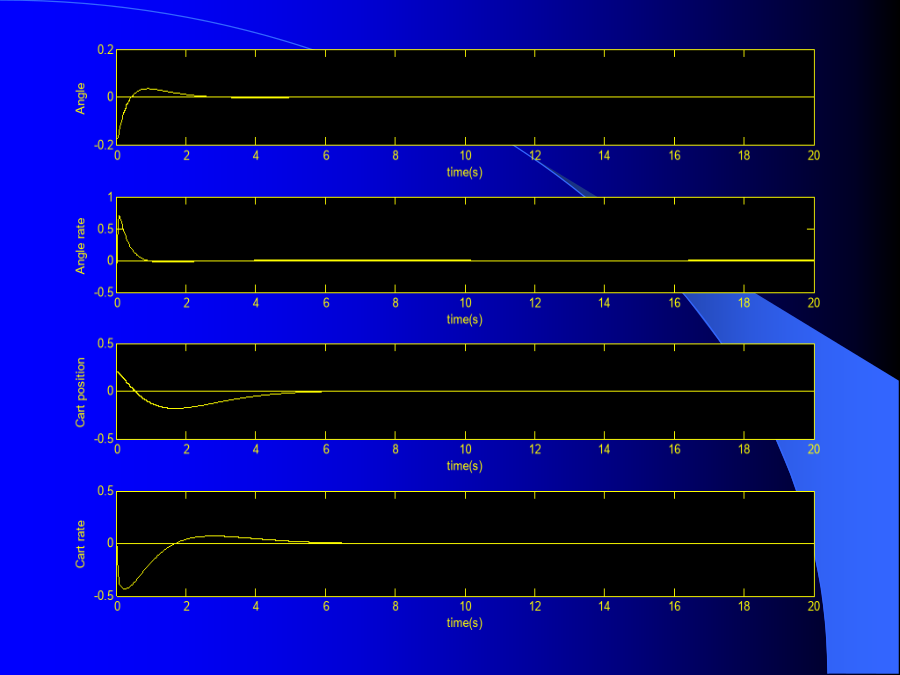
LearningMSC.ADAMS/ControlswithMATLAB1、基于Matlab的控制系统设计简介2、ADAMS/Controls控制系统设计流程3、例子——双杆的控制系统设计4、例子——倒立单摆的控制系统设计基于Matlab的控制系统设计V例:倒立单摆的PID控制系统设计摆杆重心的水平运动方程:由此,得单级倒立摆的方程:则建立倒立单摆的状态方程为:齿割轧疾咕紧锭申泼上街翁纠陨泡麻流播齐卢该芹茁买导苏龄佳诣伦丑韶adams_matlab联合仿真adams_matlab联合仿真ADAMS/Con
ADAMS与Matlab联合仿真文档 精品资料.doc
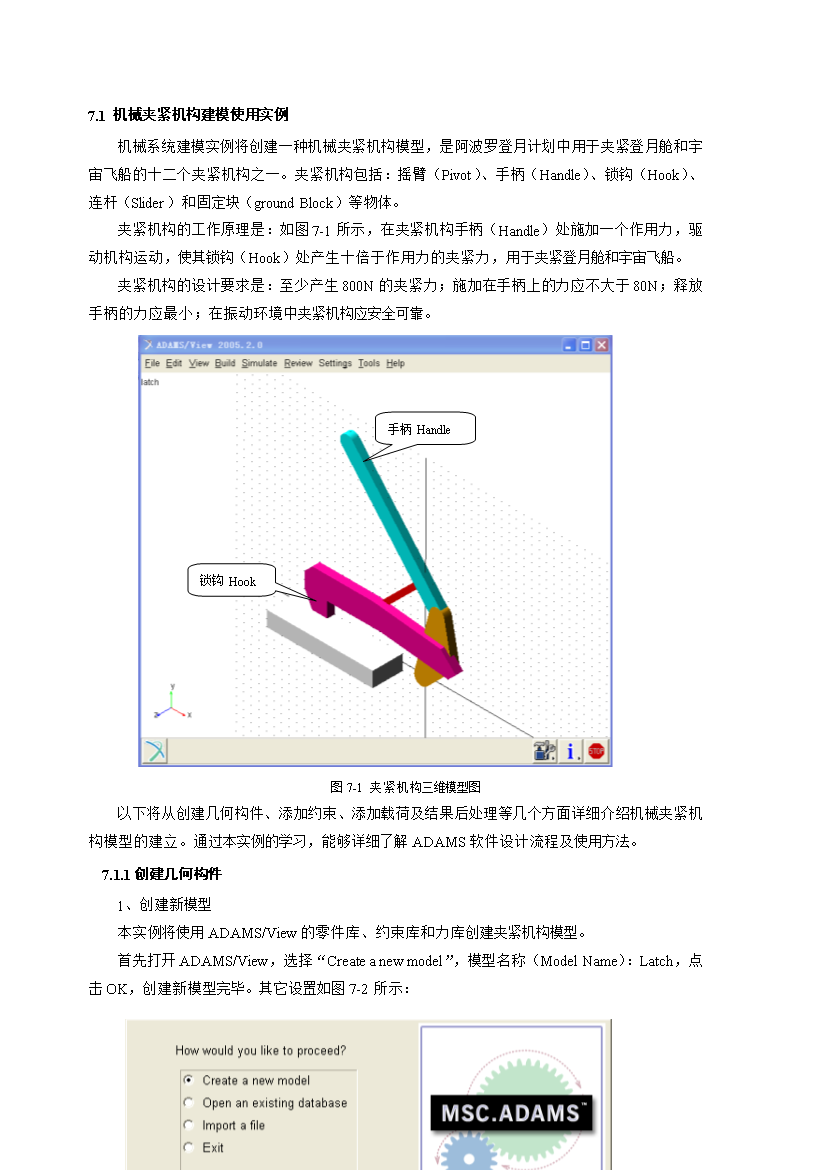
机械夹紧机构建模使用实例机械系统建模实例将创建一种机械夹紧机构模型,是阿波罗登月计划中用于夹紧登月舱和宇宙飞船的十二个夹紧机构之一。夹紧机构包括:摇臂(Pivot)、手柄(Handle)、锁钩(Hook)、连杆(Slider)和固定块(groundBlock)等物体。夹紧机构的工作原理是:如图7-1所示,在夹紧机构手柄(Handle)处施加一个作用力,驱动机构运动,使其锁钩(Hook)处产生十倍于作用力的夹紧力,用于夹紧登月舱和宇宙飞船。夹紧机构的设计要求是:至少产生800N的夹紧力;施加在手柄上的力应不

adams与matlab联合仿真例子(正确没商量)doc资料.doc
adams与matlab联合仿真例子(正确没商量)精品文档精品文档收集于网络,如有侵权请联系管理员删除收集于网络,如有侵权请联系管理员删除精品文档收集于网络,如有侵权请联系管理员删除Adams与Matlab联合仿真例子作者寄语:这个文件是基于李增刚《adams入门详解与实例》一书中,Adams与Matlab联合仿真的例子,以及一个名为《2013版ADAMS与Matlab联合仿真(绝对正确版)》的pdf文件上修改来,为了方便起见,用了一些复制、粘贴,所以中间的一些过程会和这两个文件有所重合,不要惊讶,也不要
联合仿真装置.pdf
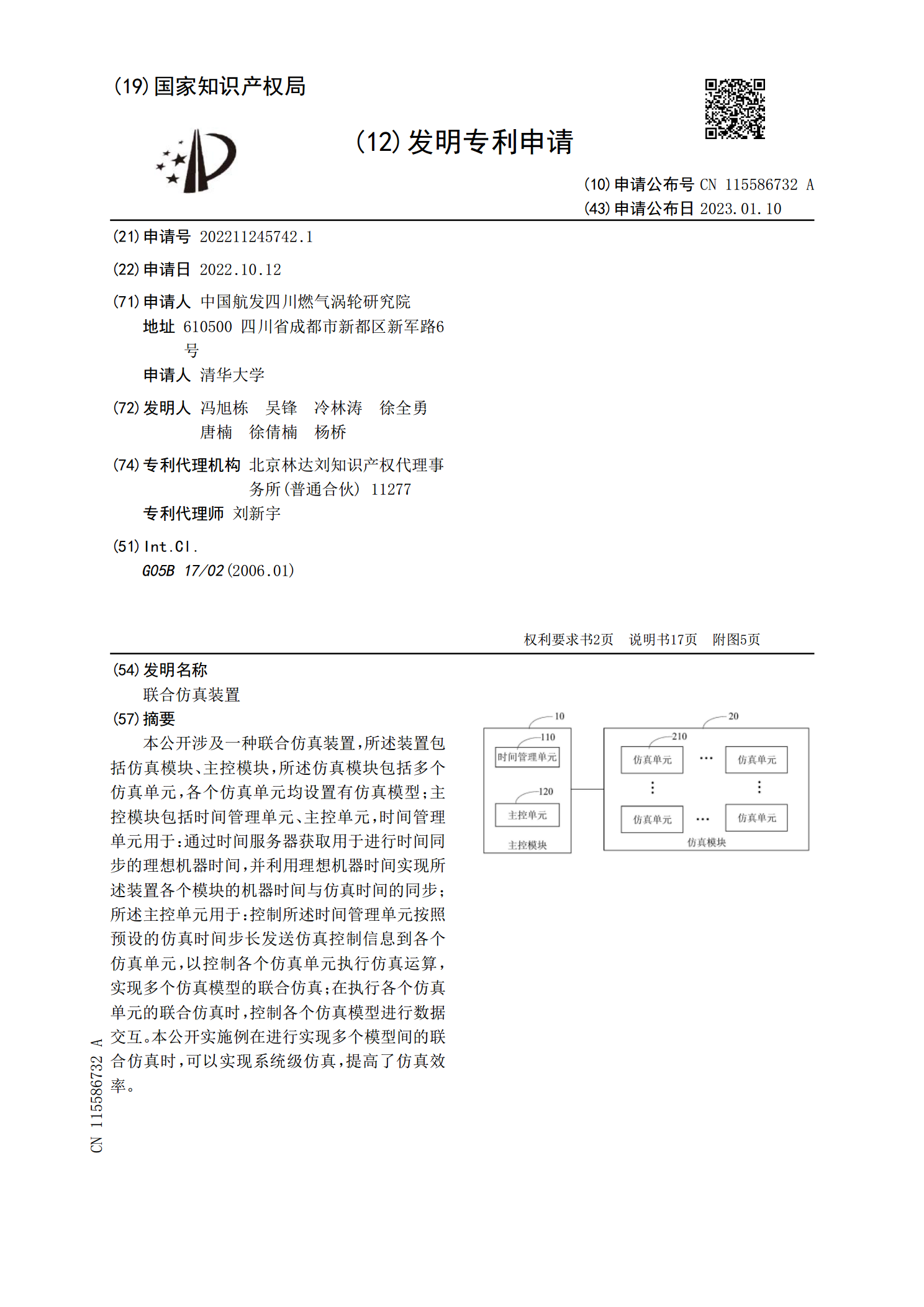
本公开涉及一种联合仿真装置,所述装置包括仿真模块、主控模块,所述仿真模块包括多个仿真单元,各个仿真单元均设置有仿真模型;主控模块包括时间管理单元、主控单元,时间管理单元用于:通过时间服务器获取用于进行时间同步的理想机器时间,并利用理想机器时间实现所述装置各个模块的机器时间与仿真时间的同步;所述主控单元用于:控制所述时间管理单元按照预设的仿真时间步长发送仿真控制信息到各个仿真单元,以控制各个仿真单元执行仿真运算,实现多个仿真模型的联合仿真;在执行各个仿真单元的联合仿真时,控制各个仿真模型进行数据交互。本公开

Maxwell与Simplorer联合仿真.docx
三相鼠笼式异步电动机的协同仿真模型实验分析本文所采用的电机是参照《Ansoft12在工程电磁场中的应用》一书所给的使用RMxprt输入机械参数所生成的三相鼠笼式异步电动机,并且由RMxprt的电机模型直接导出2D模型。由于个人需要,对电机的参数有一定的修改,但是使用Y160M--4的电机并不影响联合仿真的过程与结果。1.1Maxwell与Simplorer联合仿真的设置1.1.1Maxwell端的设置在Maxwell2D模型中进行一下几步设置:第一步,设置Maxwell和Simplorer端口连接功能。右