
单缸伸缩机构与绳排机构的比较1.docx

快乐****蜜蜂


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

单缸伸缩机构与绳排机构的比较1.docx
单缸伸缩机构与绳排机构的比较对六节臂产品的吊臂伸缩机构来说,目前比较常用的伸缩方式为单缸伸缩方式,单缸伸缩机构的原理是利用一个可以控制的具有特殊功能的伸缩油缸,对多节臂进行顺序伸缩,绳排伸缩机构的原理是通过油缸或伸缩拉索实现多节臂的伸缩,一般增加一个油缸可以减少一级拉索,同样,增加一级拉索可以减少一个油缸,对油缸和拉索进行排列组合可以形成不同的伸缩方式,由于布置伸缩用粗细拉索,截面变化较大,采用三个伸缩油缸的话,截面高度较大。单缸伸缩机构的优点:1、各节臂的截面变化较少,高宽比比较合理,截面容易优化。性能

绳排式伸缩臂机构及具有该机构的起重机.pdf
本发明公开一种绳排式伸缩臂机构,包括依序嵌套并能够相对伸缩的若干伸缩臂,部分伸缩臂通过伸缩油缸伸缩;其余各伸缩臂均能够通过一组伸出拉索和伸出滑轮、回拉拉索和回拉滑轮实现伸出和缩回;一组伸出滑轮和回拉滑轮分别设于一伸缩臂的臂尾和臂头,对应的回拉拉索和伸出拉索的两端均分别连接至该伸缩臂的前一伸缩臂、后一伸缩臂,回拉滑轮设于该伸缩臂尾部的内周壁处。该发明将回拉滑轮设于伸缩臂的内周壁处,相应的回拉拉索的拉索座等附属构件均位于尾部内周壁处,不再占用伸缩臂尾端的空间,使得结构紧凑,伸缩臂能够搭接的长度显著加长,伸缩幅
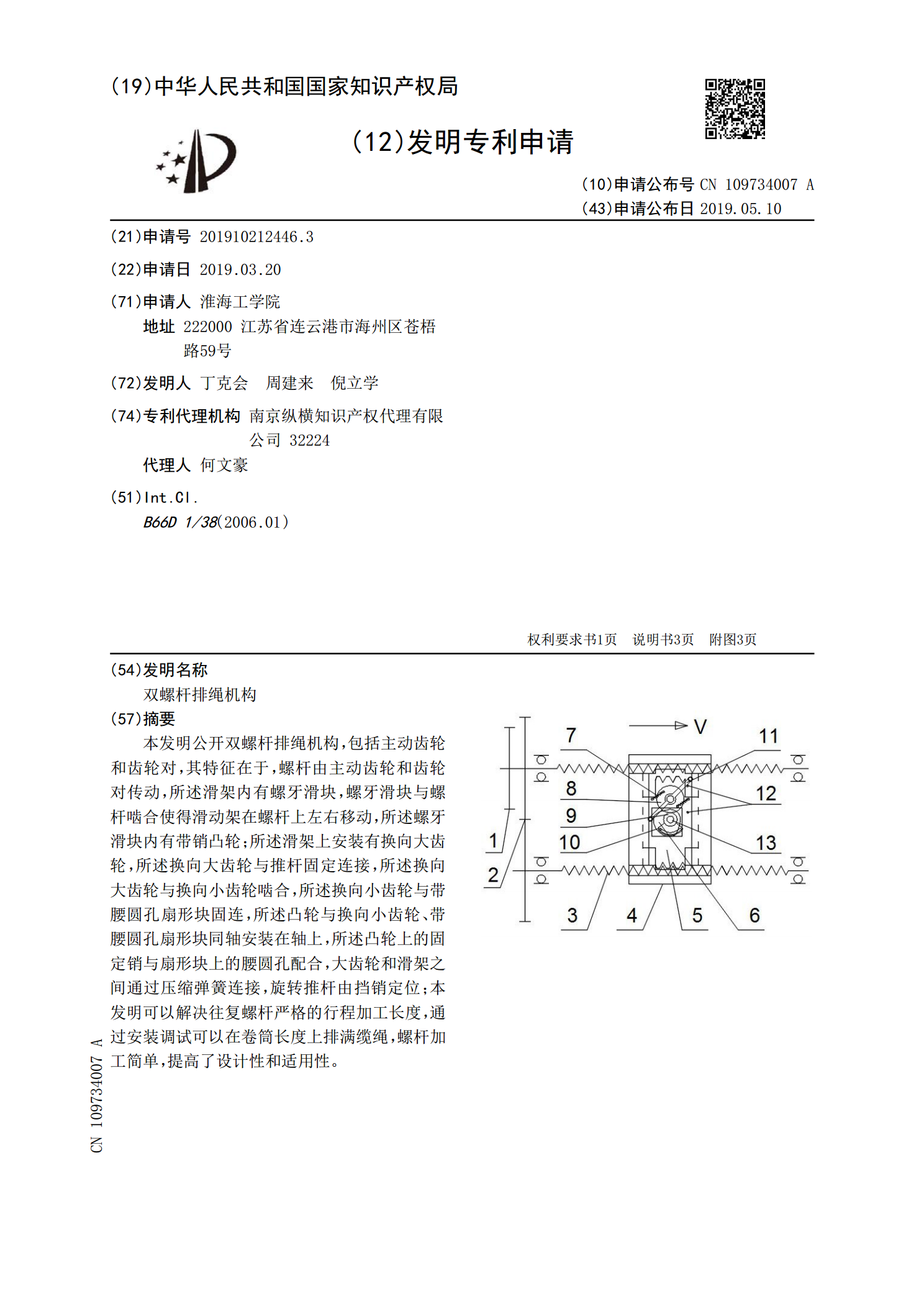
双螺杆排绳机构.pdf
本发明公开双螺杆排绳机构,包括主动齿轮和齿轮对,其特征在于,螺杆由主动齿轮和齿轮对传动,所述滑架内有螺牙滑块,螺牙滑块与螺杆啮合使得滑动架在螺杆上左右移动,所述螺牙滑块内有带销凸轮;所述滑架上安装有换向大齿轮,所述换向大齿轮与推杆固定连接,所述换向大齿轮与换向小齿轮啮合,所述换向小齿轮与带腰圆孔扇形块固连,所述凸轮与换向小齿轮、带腰圆孔扇形块同轴安装在轴上,所述凸轮上的固定销与扇形块上的腰圆孔配合,大齿轮和滑架之间通过压缩弹簧连接,旋转推杆由挡销定位;本发明可以解决往复螺杆严格的行程加工长度,通过安装调试

擦窗机的牵引排绳机构.pdf
本发明涉及的是一种建筑物外墙清洗技术领域的机械装置,具体涉及一种擦窗机起升机构内部的牵引排绳机构。本发明擦窗机的牵引排绳机构通过双向丝杆传动一套牵引导轮组,使得牵引导轮组形成四个封闭导向槽,再通过双向丝母的来回运动,使得牵引导轮组顺着卷筒的轴向作往返运动,进而实现钢丝绳的排绳效果。其排绳原理是将钢丝绳进行牵引排绳,改变了以往通过移动卷筒的方式排式,在排绳理念上一个突破性变革,使整个起升机构在结构上简单化,并且其制造成本大大降低,在排绳效果上明显,并且更加紧凑,同时,采用了矩形槽的双向丝杆结构形式,解决了以
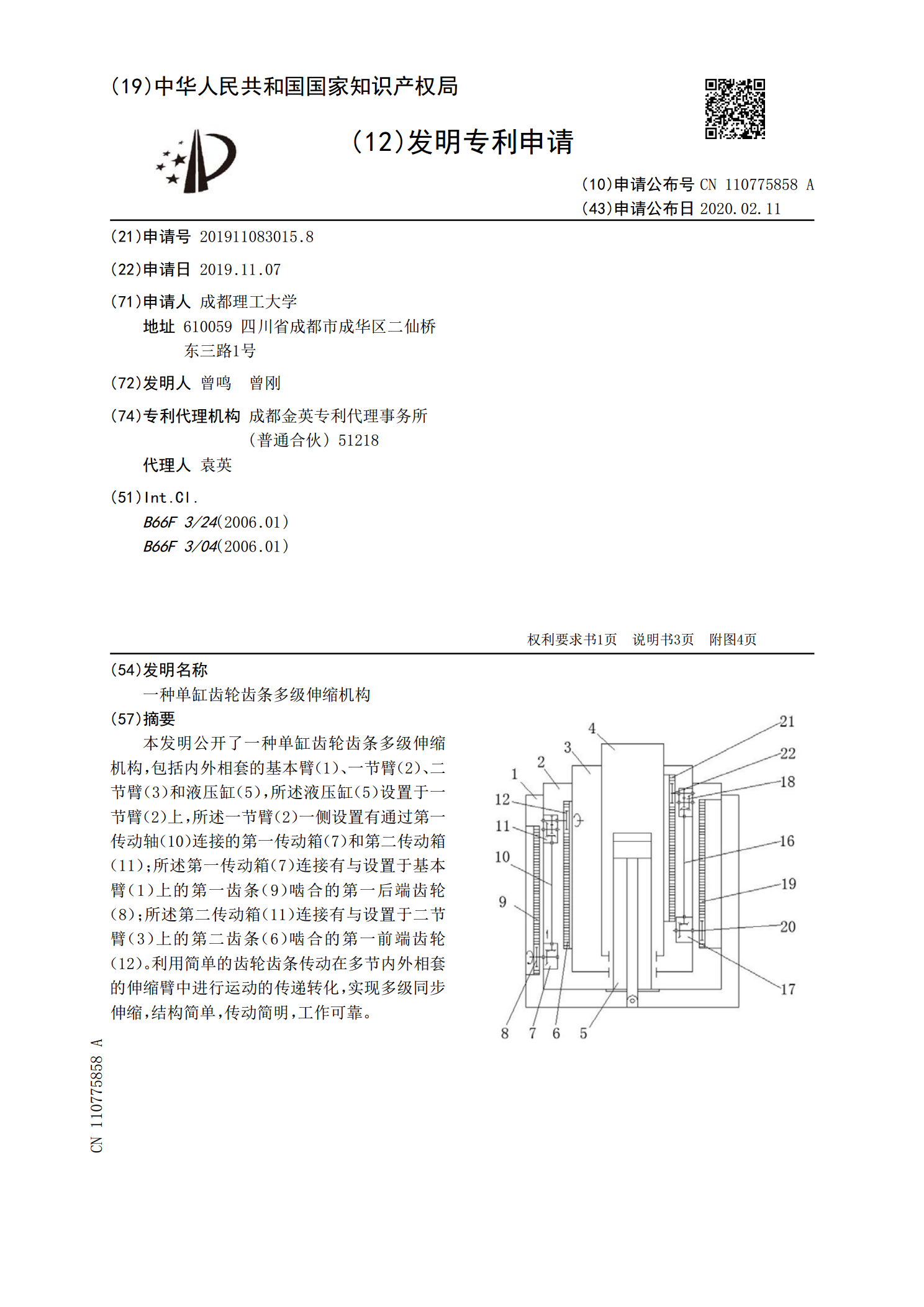
一种单缸齿轮齿条多级伸缩机构.pdf
本发明公开了一种单缸齿轮齿条多级伸缩机构,包括内外相套的基本臂(1)、一节臂(2)、二节臂(3)和液压缸(5),所述液压缸(5)设置于一节臂(2)上,所述一节臂(2)一侧设置有通过第一传动轴(10)连接的第一传动箱(7)和第二传动箱(11);所述第一传动箱(7)连接有与设置于基本臂(1)上的第一齿条(9)啮合的第一后端齿轮(8);所述第二传动箱(11)连接有与设置于二节臂(3)上的第二齿条(6)啮合的第一前端齿轮(12)。利用简单的齿轮齿条传动在多节内外相套的伸缩臂中进行运动的传递转化,实现多级同步伸缩,