
PLC通过USS协议网络控制变频器的运行课件.ppt

YY****。。


1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

PLC通过USS协议网络控制变频器的运行课件.ppt
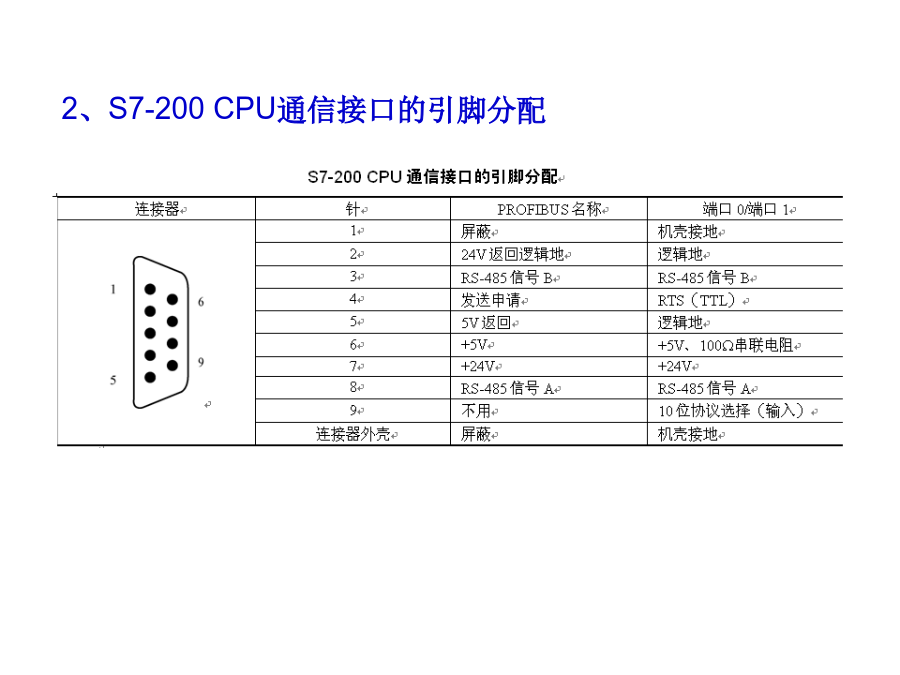
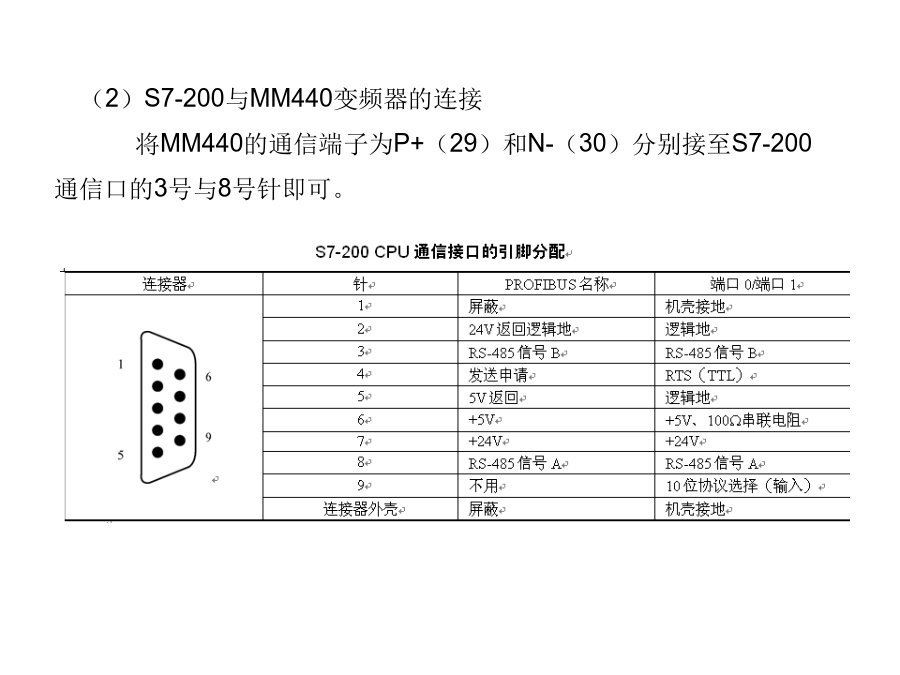
第8讲PLC通过USS协议网络控制变频器的运行一、USS通信及硬件连接2、S7-200CPU通信接口的引脚分配3、USS通信硬件连接d、尽量采用较高的波特率,通信速率只与通信距离有关,与干扰没有直接关系。e、终端电阻的作用是用来防止信号反射的,并不用来抗干扰。如果通信距离很近,波特率较低或点对点的通信情况下,可不用终端电阻。f、不要带电插拔通信电缆,尤其是正在通信过程中,这样极易损坏传动装置和PLC的通信端口。(2)S7-200与MM440变频器的连接将MM440的通信端子为P+(29)和N-(30)分别
讲_PLC通过USS协议网络控制变频器.ppt
编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件编辑课件
LC通过USS协议网络控制变频器的运行.pptx
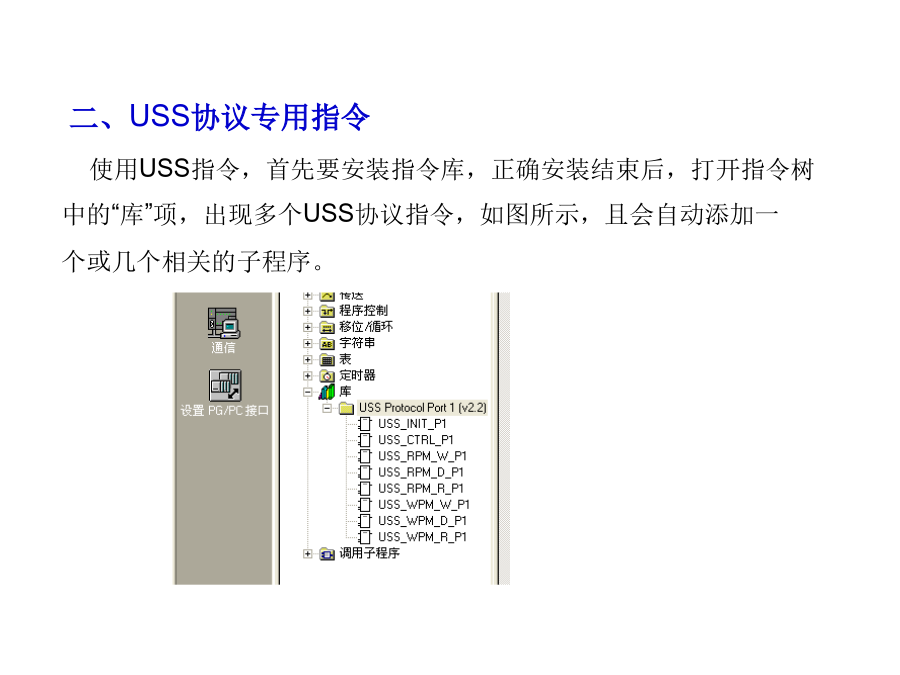
第8讲PLC通过USS协议网络控制变频器的运行一、USS通信及硬件连接2、S7-200CPU通信接口的引脚分配d、尽量采用较高的波特率,通信速率只与通信距离有关,与干扰没有直接关系。e、终端电阻的作用是用来防止信号反射的,并不用来抗干扰。如果通信距离很近,波特率较低或点对点的通信情况下,可不用终端电阻。f、不要带电插拔通信电缆,尤其是正在通信过程中,这样极易损坏传动装置和PLC的通信端口。二、USS协议专用指令2、USS_CTRL(6)当RUN为OFF时,会向驱动器发出一条命令,将速度降低,直至电动机停止
LC通过USS协议网络控制变频器的运行.pptx
第8讲PLC通过USS协议网络控制变频器的运行一、USS通信及硬件连接2、S7-200CPU通信接口的引脚分配d、尽量采用较高的波特率,通信速率只与通信距离有关,与干扰没有直接关系。e、终端电阻的作用是用来防止信号反射的,并不用来抗干扰。如果通信距离很近,波特率较低或点对点的通信情况下,可不用终端电阻。f、不要带电插拔通信电缆,尤其是正在通信过程中,这样极易损坏传动装置和PLC的通信端口。二、USS协议专用指令2、USS_CTRL(6)当RUN为OFF时,会向驱动器发出一条命令,将速度降低,直至电动机停止

USS网络协议控制变频器的接线.docx
USS网络协议控制变频器的接线、指令、库一、USS通信及硬件连接1、使用USS协议的优点使用USS协议的优点如下:(1)USS协议对硬件设备要求低,减少了设备之间布线的数量。(2)无需重新布线就可以改变控制功能。(3)可通过串行接口设置来修改变频器的参数。(4)可连续对变频器的特性进行监测和控制。(5)利用S7-200CPU组成USS通信的控制网络具有较高的性价比。2、S7-200CPU通信接口的引脚分配3、USS通信硬件连接(1)通信注意事项a、条件许可的情况下,USS主站尽量选用直流型的CPU。当使用