
皮带机自移机尾功能.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

皮带机自移机尾功能.docx
自移机尾自动控制系统功能描述一概述自移机尾是综采工作面运输系统的重要组成环节,主要完成在工作面推进过程中实现转载机的推进和皮带机尾移动的协调;接受从转载机来的物料,并转入皮带系统。为提高物料转运效率,降低操作劳动强度和改善工作环境,特开发自移机尾自动控制系统。二自移机尾结构原理带式输送机自移机尾是顺槽转载机与带式输送机的中间衔接装置,满足高产高效工作面高进尺、快推进的配套要求。具有胶带跑偏调整、转载机推移方向校正和自行前移等功能,主要由头端架、中间基架、尾端架、小车、浮动托辊组、滚筒润滑装置、液控系统等组
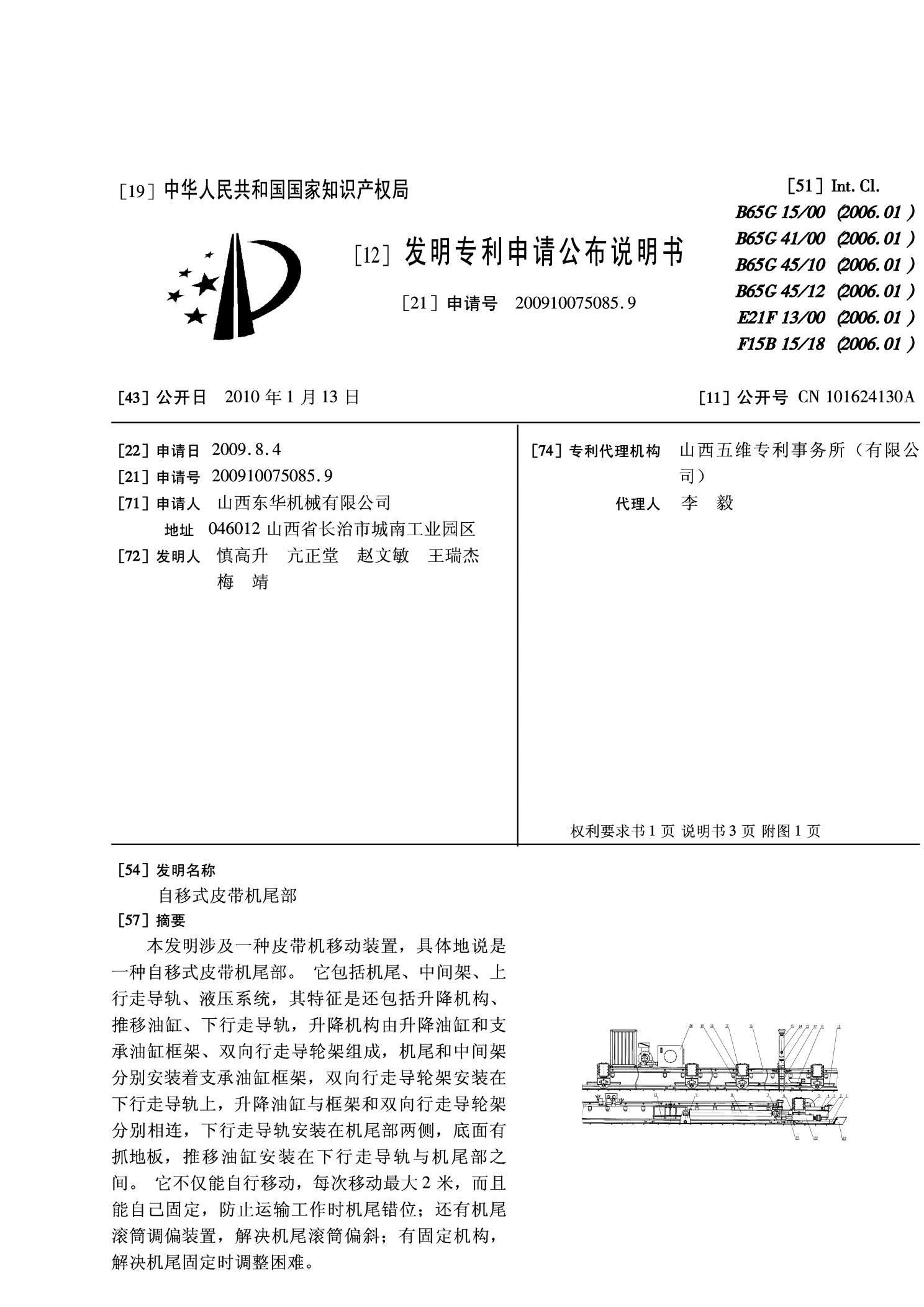
自移式皮带机尾部.pdf
本发明涉及一种皮带机移动装置,具体地说是一种自移式皮带机尾部。它包括机尾、中间架、上行走导轨、液压系统,其特征是还包括升降机构、推移油缸、下行走导轨,升降机构由升降油缸和支承油缸框架、双向行走导轮架组成,机尾和中间架分别安装着支承油缸框架,双向行走导轮架安装在下行走导轨上,升降油缸与框架和双向行走导轮架分别相连,下行走导轨安装在机尾部两侧,底面有抓地板,推移油缸安装在下行走导轨与机尾部之间。它不仅能自行移动,每次移动最大2米,而且能自己固定,防止运输工作时机尾错位;还有机尾滚筒调偏装置,解决机

皮带机自移机尾的主要结构特点.doc
皮带机自移机尾的主要结构特点:尾端架中的机尾改向装置采用螺旋滚筒,具有自动清煤的作用,使用效果好。组合基架可根据用户要求进行设计,以适应不同行程要求,搭接不同高低的转载机的要求。所有滚筒均采用黄油润滑,集中注脂。转载机机头与小车的联接座联接,有三个方向的旋转自由度。所以,自移机尾不受转载机的影响,可以适应不同条件的顺槽。皮带机自移机尾设有浮动托辊装置,可通过油缸调整浮动托辊的高低,以适应皮带机的高度变化。该皮带机自移机尾能够实现调高、调偏、调角、自行前移的功能,推移行程2700mm,满足工作面三道一推的作

迈步自移式皮带机尾的研制与应用.docx
迈步自移式皮带机尾的研制与应用迈步自移式皮带机尾的研制与应用摘要:随着工业自动化的发展,物流行业对于传送带技术的需求越来越高。传统的传送带技术使用固定式机尾,但在实际生产中,单一的传送带长度无法满足各种物料不同的运输需求。针对这一问题,本文介绍了迈步自移式皮带机尾的研制与应用。首先,我们介绍了迈步自移式皮带机尾的原理,包括机尾移动机构、皮带自动调整系统和控制系统的设计。然后,我们详细探讨了迈步自移式皮带机尾在物流行业中的应用,包括其在物料分拣、装卸和包装等环节的应用。最后,我们总结了迈步自移式皮带机尾的优
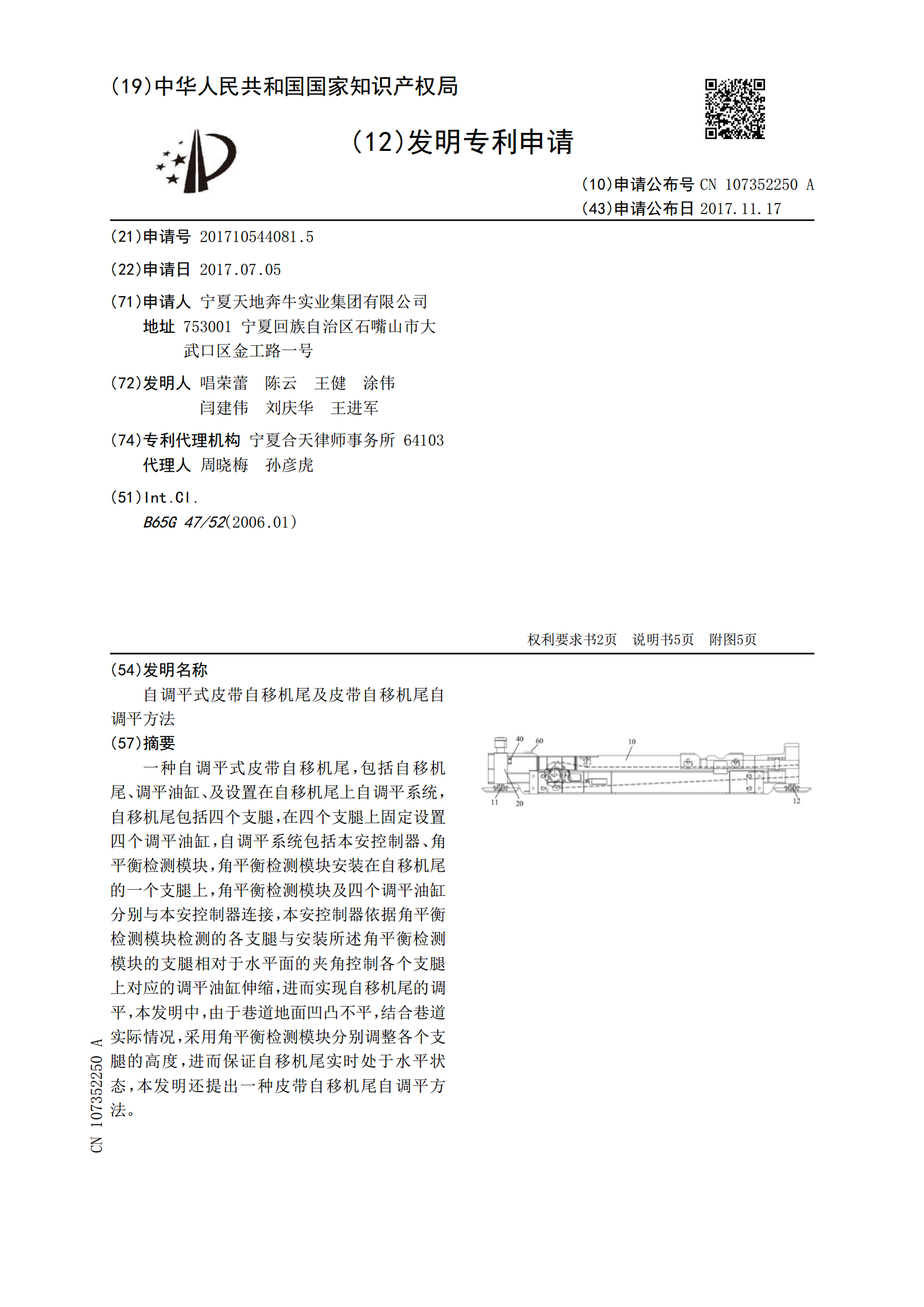
自调平式皮带自移机尾及皮带自移机尾自调平方法.pdf
一种自调平式皮带自移机尾,包括自移机尾、调平油缸、及设置在自移机尾上自调平系统,自移机尾包括四个支腿,在四个支腿上固定设置四个调平油缸,自调平系统包括本安控制器、角平衡检测模块,角平衡检测模块安装在自移机尾的一个支腿上,角平衡检测模块及四个调平油缸分别与本安控制器连接,本安控制器依据角平衡检测模块检测的各支腿与安装所述角平衡检测模块的支腿相对于水平面的夹角控制各个支腿上对应的调平油缸伸缩,进而实现自移机尾的调平,本发明中,由于巷道地面凹凸不平,结合巷道实际情况,采用角平衡检测模块分别调整各个支腿的高度,进