
自调平式皮带自移机尾及皮带自移机尾自调平方法.pdf

一条****彩妍

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自调平式皮带自移机尾及皮带自移机尾自调平方法.pdf
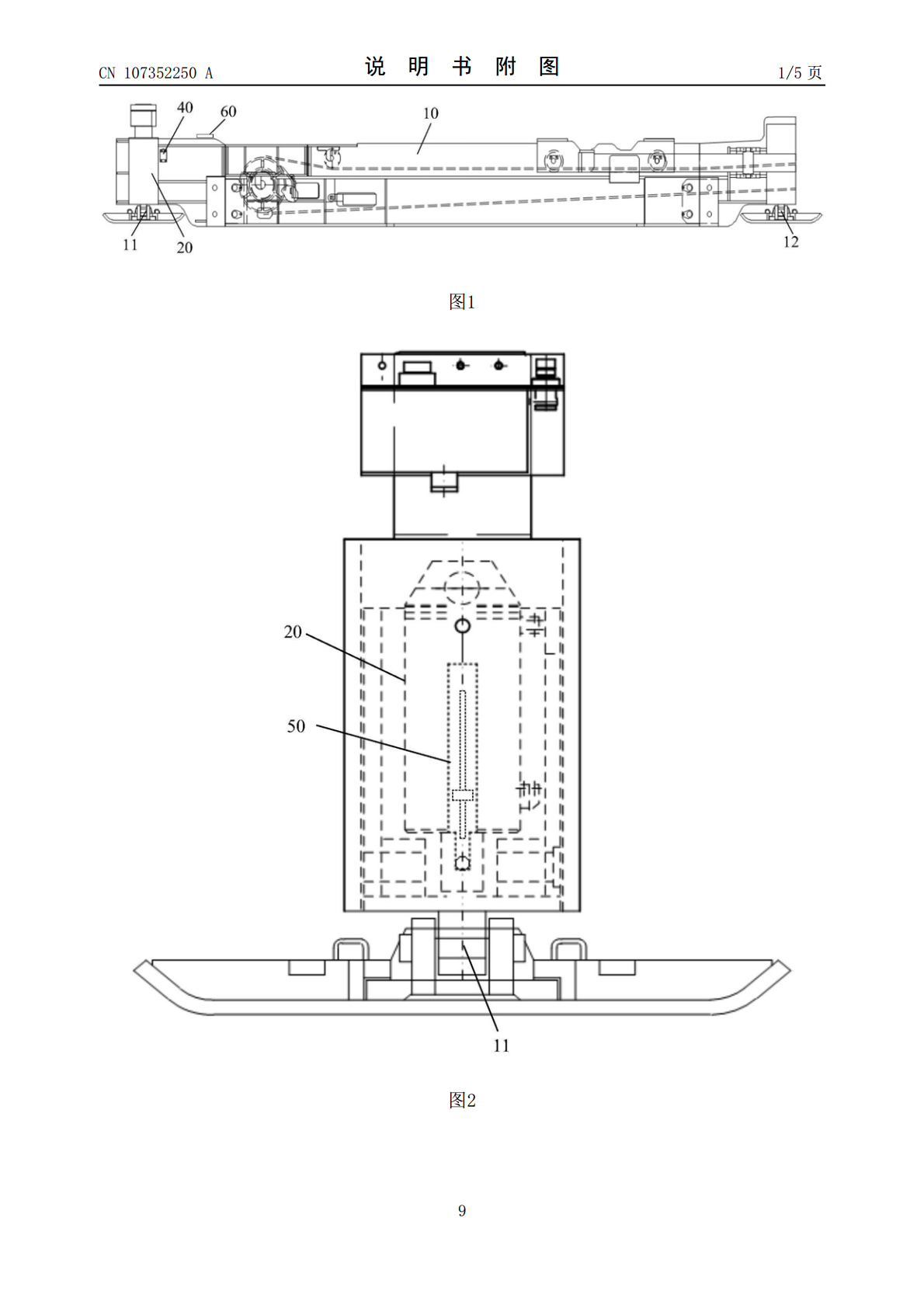
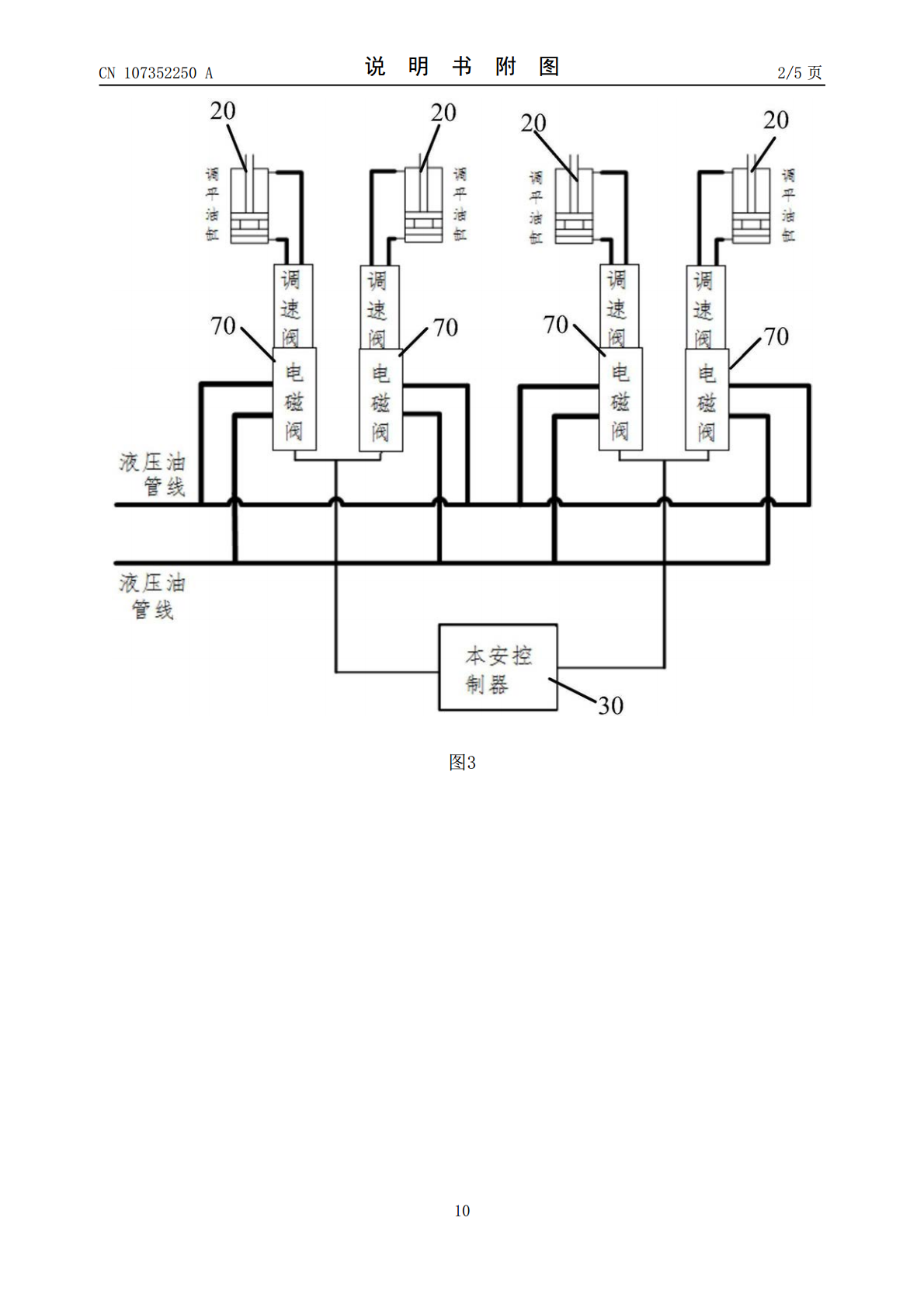
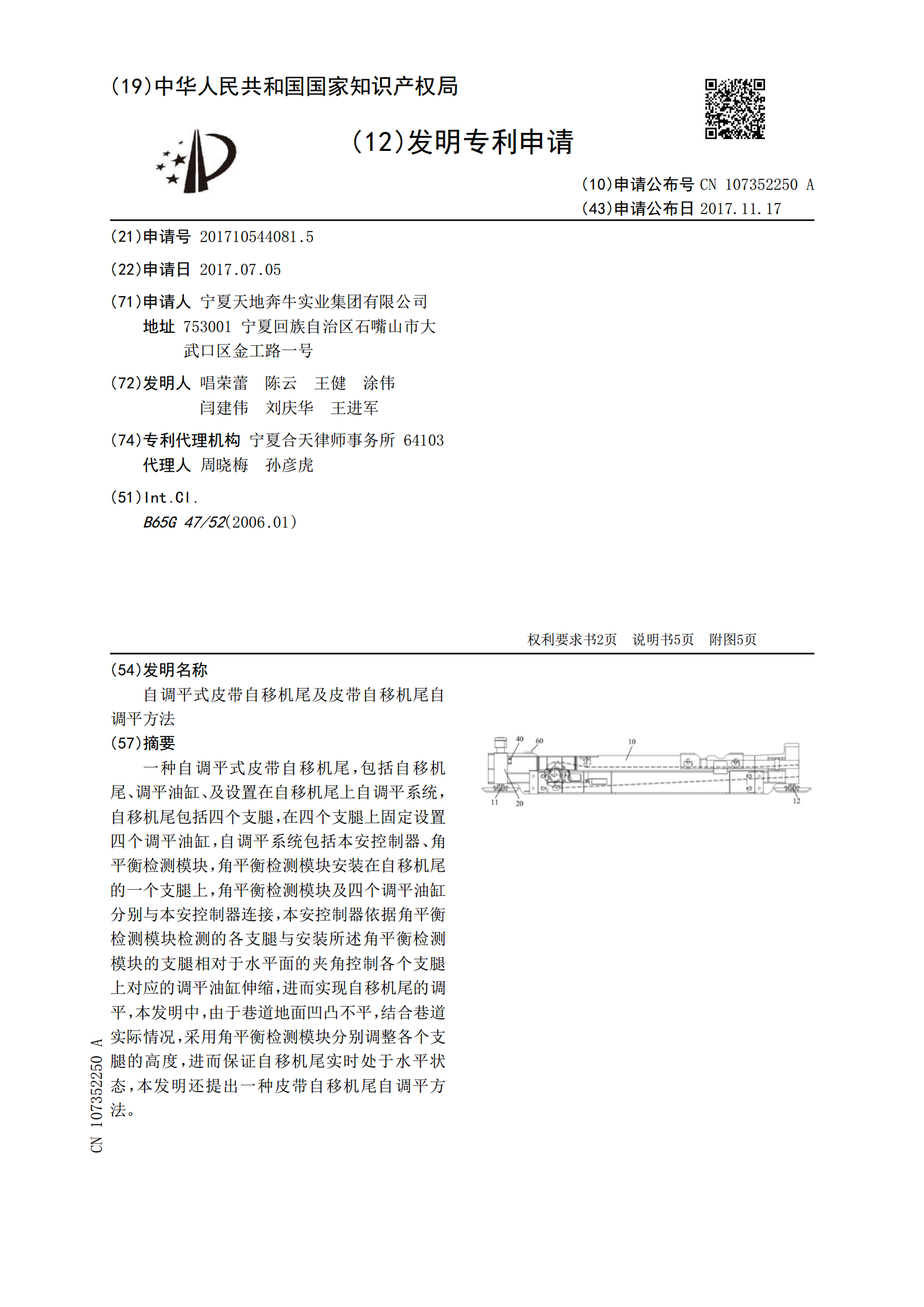
一种自调平式皮带自移机尾,包括自移机尾、调平油缸、及设置在自移机尾上自调平系统,自移机尾包括四个支腿,在四个支腿上固定设置四个调平油缸,自调平系统包括本安控制器、角平衡检测模块,角平衡检测模块安装在自移机尾的一个支腿上,角平衡检测模块及四个调平油缸分别与本安控制器连接,本安控制器依据角平衡检测模块检测的各支腿与安装所述角平衡检测模块的支腿相对于水平面的夹角控制各个支腿上对应的调平油缸伸缩,进而实现自移机尾的调平,本发明中,由于巷道地面凹凸不平,结合巷道实际情况,采用角平衡检测模块分别调整各个支腿的高度,进
自移式皮带机尾部.pdf
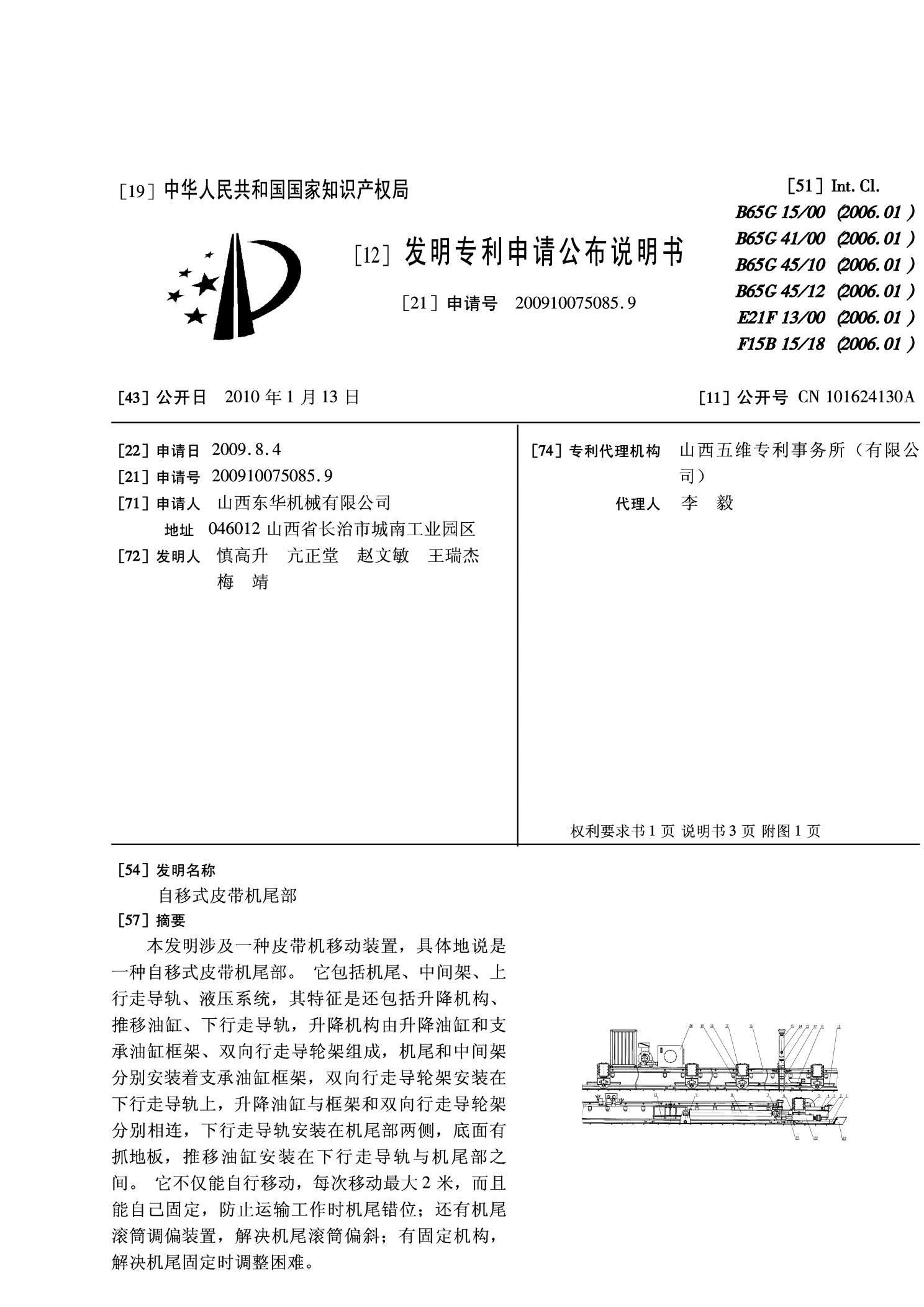
本发明涉及一种皮带机移动装置,具体地说是一种自移式皮带机尾部。它包括机尾、中间架、上行走导轨、液压系统,其特征是还包括升降机构、推移油缸、下行走导轨,升降机构由升降油缸和支承油缸框架、双向行走导轮架组成,机尾和中间架分别安装着支承油缸框架,双向行走导轮架安装在下行走导轨上,升降油缸与框架和双向行走导轮架分别相连,下行走导轨安装在机尾部两侧,底面有抓地板,推移油缸安装在下行走导轨与机尾部之间。它不仅能自行移动,每次移动最大2米,而且能自己固定,防止运输工作时机尾错位;还有机尾滚筒调偏装置,解决机
一种机尾自移式皮带输送机.pdf
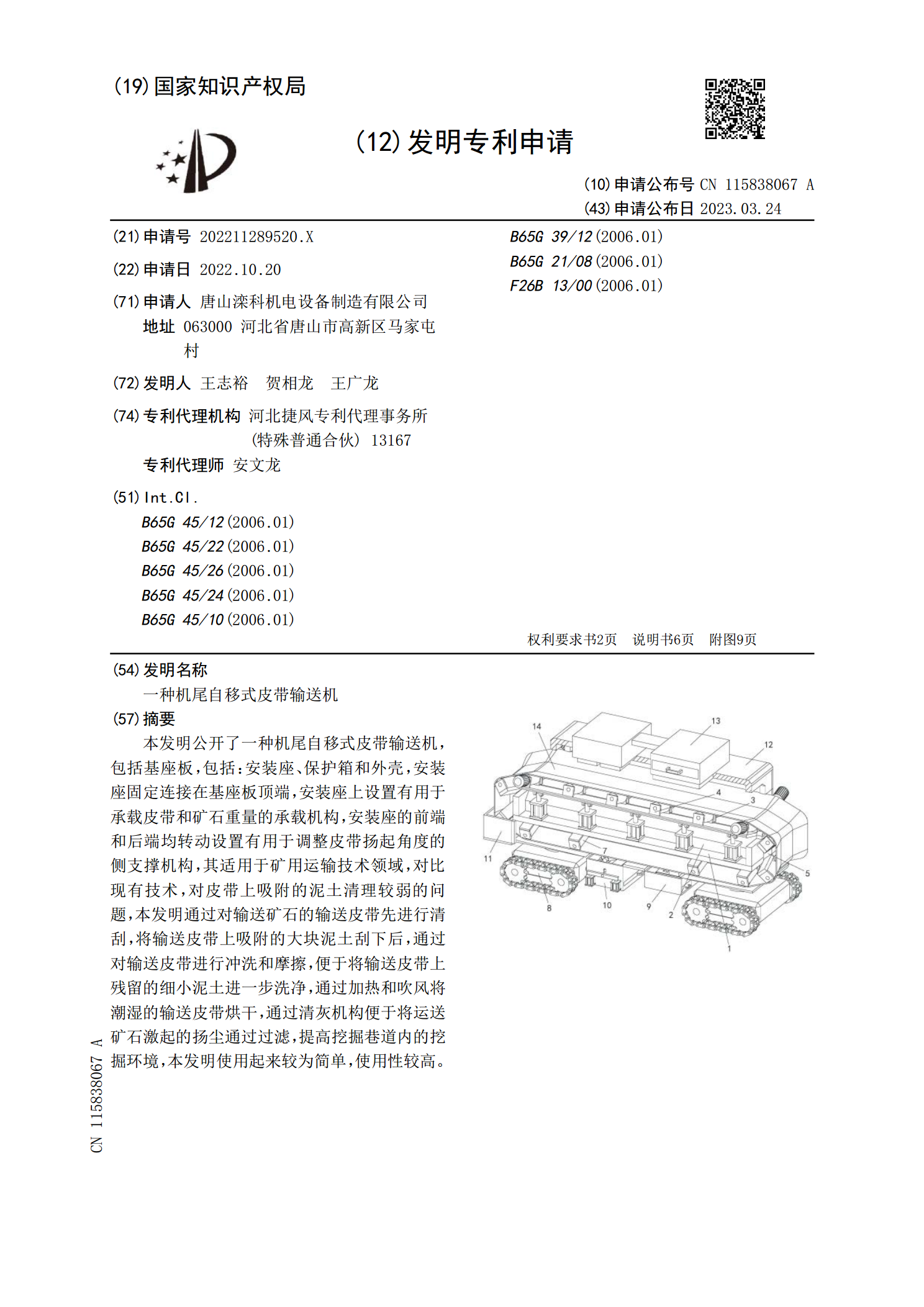
本发明公开了一种机尾自移式皮带输送机,包括基座板,包括:安装座、保护箱和外壳,安装座固定连接在基座板顶端,安装座上设置有用于承载皮带和矿石重量的承载机构,安装座的前端和后端均转动设置有用于调整皮带扬起角度的侧支撑机构,其适用于矿用运输技术领域,对比现有技术,对皮带上吸附的泥土清理较弱的问题,本发明通过对输送矿石的输送皮带先进行清刮,将输送皮带上吸附的大块泥土刮下后,通过对输送皮带进行冲洗和摩擦,便于将输送皮带上残留的细小泥土进一步洗净,通过加热和吹风将潮湿的输送皮带烘干,通过清灰机构便于将运送矿石激起的扬
齿轮-销轨牵引皮带自移机尾的使用方法.pdf
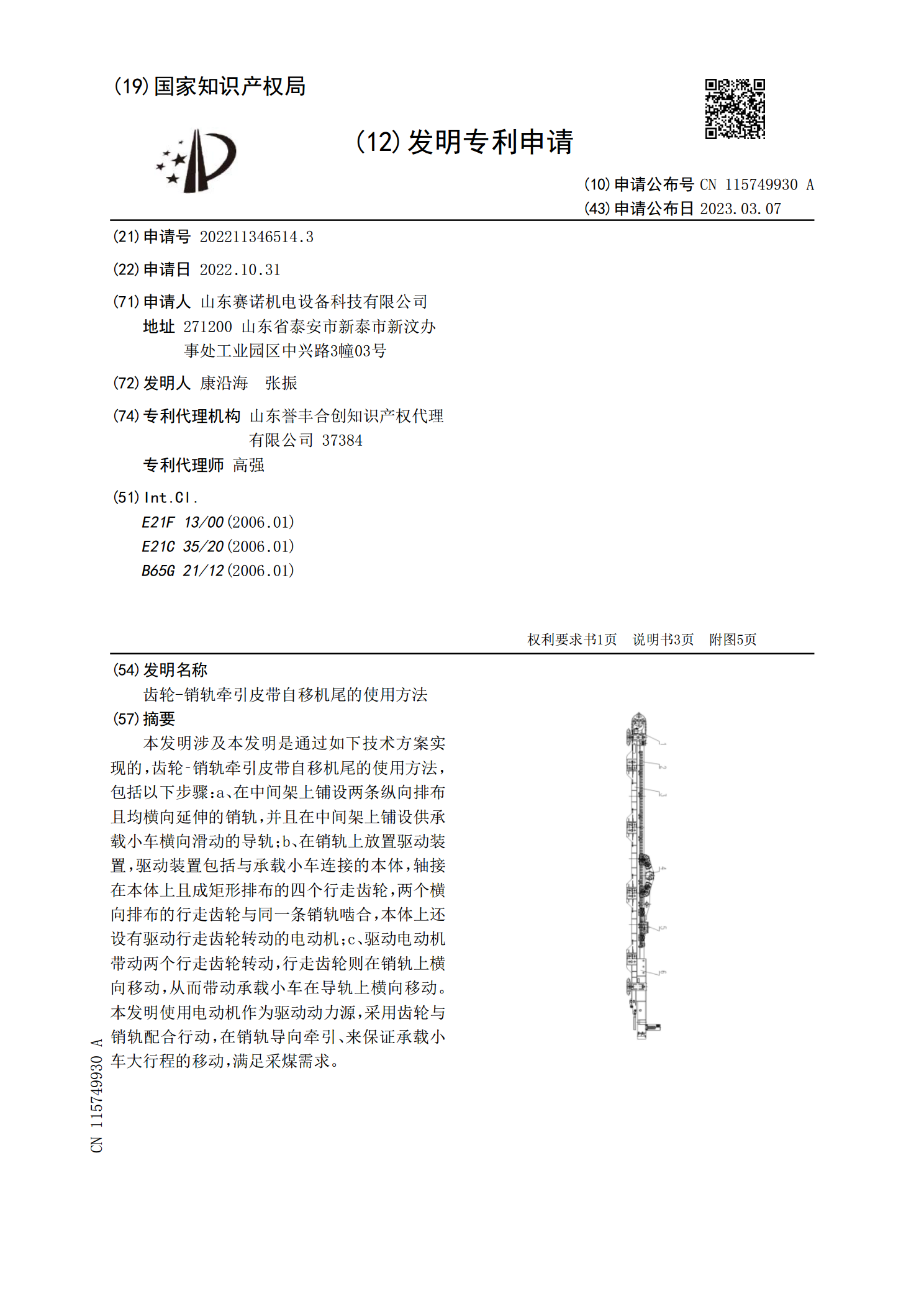
本发明涉及本发明是通过如下技术方案实现的,齿轮‑销轨牵引皮带自移机尾的使用方法,包括以下步骤:a、在中间架上铺设两条纵向排布且均横向延伸的销轨,并且在中间架上铺设供承载小车横向滑动的导轨;b、在销轨上放置驱动装置,驱动装置包括与承载小车连接的本体,轴接在本体上且成矩形排布的四个行走齿轮,两个横向排布的行走齿轮与同一条销轨啮合,本体上还设有驱动行走齿轮转动的电动机;c、驱动电动机带动两个行走齿轮转动,行走齿轮则在销轨上横向移动,从而带动承载小车在导轨上横向移动。本发明使用电动机作为驱动动力源,采用齿轮与销轨
迈步自移式机尾装置.pdf
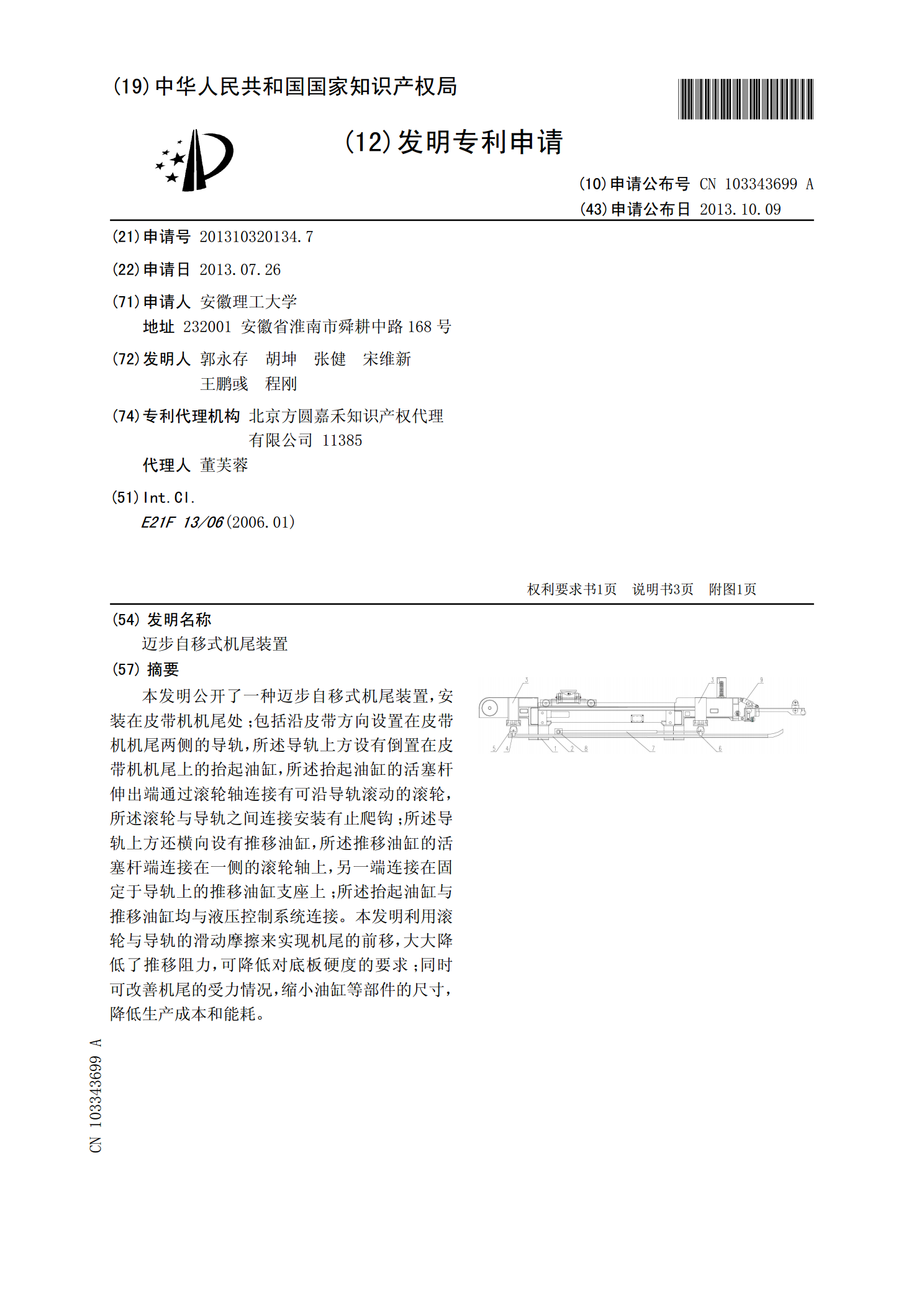
本发明公开了一种迈步自移式机尾装置,安装在皮带机机尾处;包括沿皮带方向设置在皮带机机尾两侧的导轨,所述导轨上方设有倒置在皮带机机尾上的抬起油缸,所述抬起油缸的活塞杆伸出端通过滚轮轴连接有可沿导轨滚动的滚轮,所述滚轮与导轨之间连接安装有止爬钩;所述导轨上方还横向设有推移油缸,所述推移油缸的活塞杆端连接在一侧的滚轮轴上,另一端连接在固定于导轨上的推移油缸支座上;所述抬起油缸与推移油缸均与液压控制系统连接。本发明利用滚轮与导轨的滑动摩擦来实现机尾的前移,大大降低了推移阻力,可降低对底板硬度的要求;同时可改善机尾