
工业机器人工作原理及其基本构成.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

工业机器人工作原理及其基本构成.docx
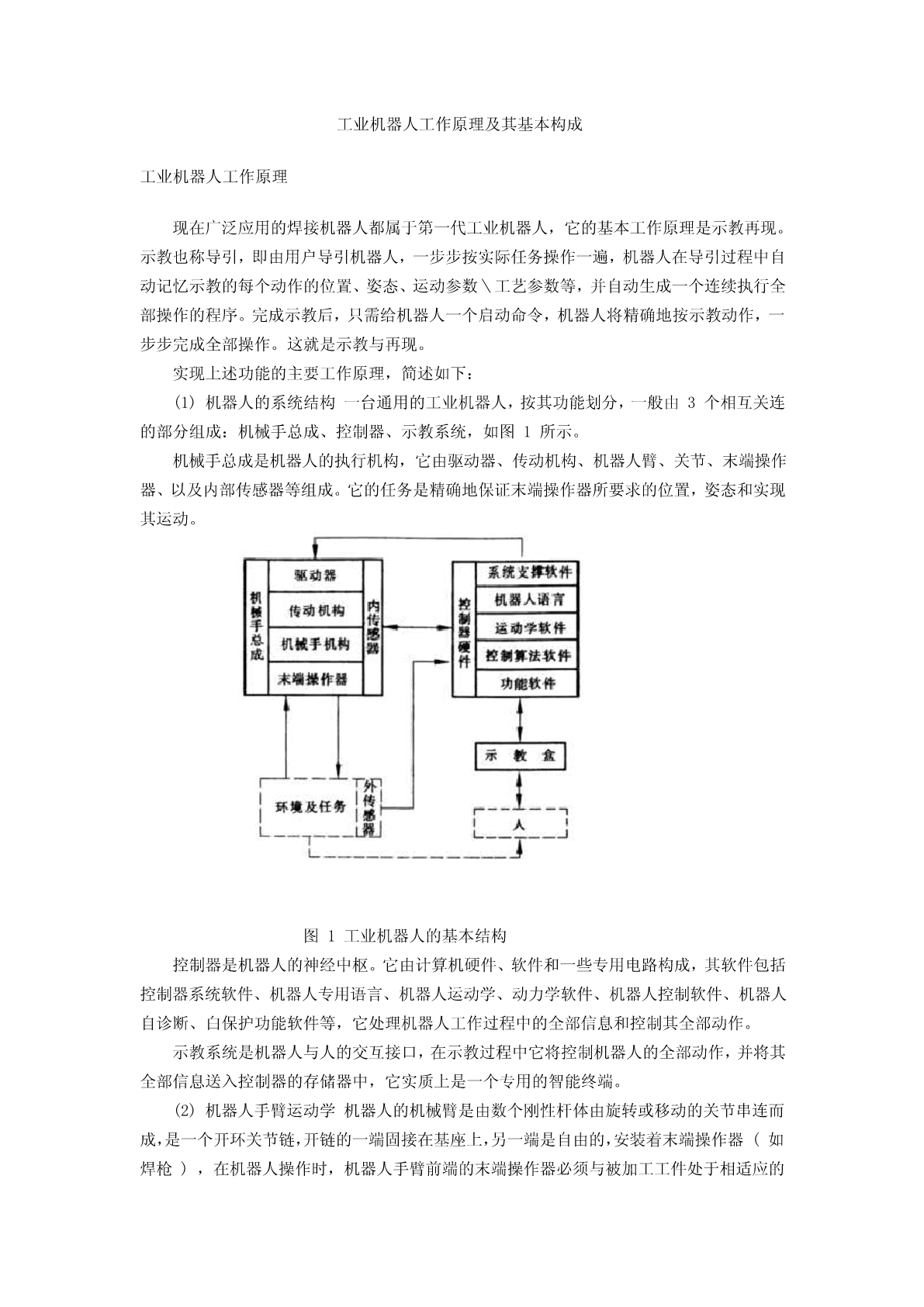
工业机器人工作原理及其基本构成工业机器人工作原理现在广泛应用的焊接机器人都属于第一代工业机器人,它的基本工作原理是示教再现。示教也称导引,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数\工艺参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器人一个启动命令,机器人将精确地按示教动作,一步步完成全部操作。这就是示教与再现。实现上述功能的主要工作原理,简述如下:(1)机器人的系统结构一台通用的工业机器人,按其功能划分,一般由3个相互
工业机器人工作原理及其基本构成.pdf
工业机器人工作原理及其基本构成工业机器人工作原理现在广泛应用的焊接机器人都属于第一代工业机器人,它的基本工作原理是示教再现。示教也称导引,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数\工艺参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器人一个启动命令,机器人将精确地按示教动作,一步步完成全部操作。这就是示教与再现。实现上述功能的主要工作原理,简述如下:(1)机器人的系统结构一台通用的工业机器人,按其功能划分,一般由3个相互

纳米机器人执行系统的基本构成及工作原理.ppt
纳米机器人—执行系统的基本构成及工作原理纳米机器人1、用于纳米压印的纳米定位平台1、用于纳米压印的纳米定位平台2、用于原子力显微镜的纳米定位平台3、纳米定位平台执行机构4、生物纳米机器人Thankyou!!!

机器人基本构成.doc
机器人基本构成机器人系统通常分为三大部分:机械部分、传感部分和控制部分;六个子系统:驱动系统、机械系统、感知系统、人机交互系统、机器人环境交互系统、控制系统等组成(如图1所示)。图1机器人系统的基本构成1.机械系统机械系统又称操作机或执行机构系统,由一系列连杆、关节或其他形式的运动部件组成,通常包括机座、立柱、腰关节、臂关节、腕关节和手爪等,构成多自由度机械系统。工业机器人机械系统由机身、手臂和末端执行器组成,机身可具有行走机构,手臂一般有上臂、下臂和手腕组成,末端执行器直接装在手腕上,可以是两手指或多手

智能机器人构成原理.ppt
第二章智能机器人构成原理第二章智能机器人构成原理第二章智能机器人构成原理PrimaryObjectives(基本目标)(一)RecognizetheEnvironment(识别环境)(二)Learnonitsown(自主学习)(三)Super-fastbrain(超快大脑)(四)VersatileBody(多功能本体)第二章智能机器人构成原理第二章智能机器人构成原理第二章智能机器人构成原理第二章智能机器人构成原理第二章智能机器人构成原理第二章智能机器人构成原理第二章智能机器人构成原理第二章智能机器人构成原