
基于D-S证据理论的障碍目标身份识别.pdf

Jo****34


1/6
2/6

3/6

4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于D-S证据理论的障碍目标身份识别.pdf
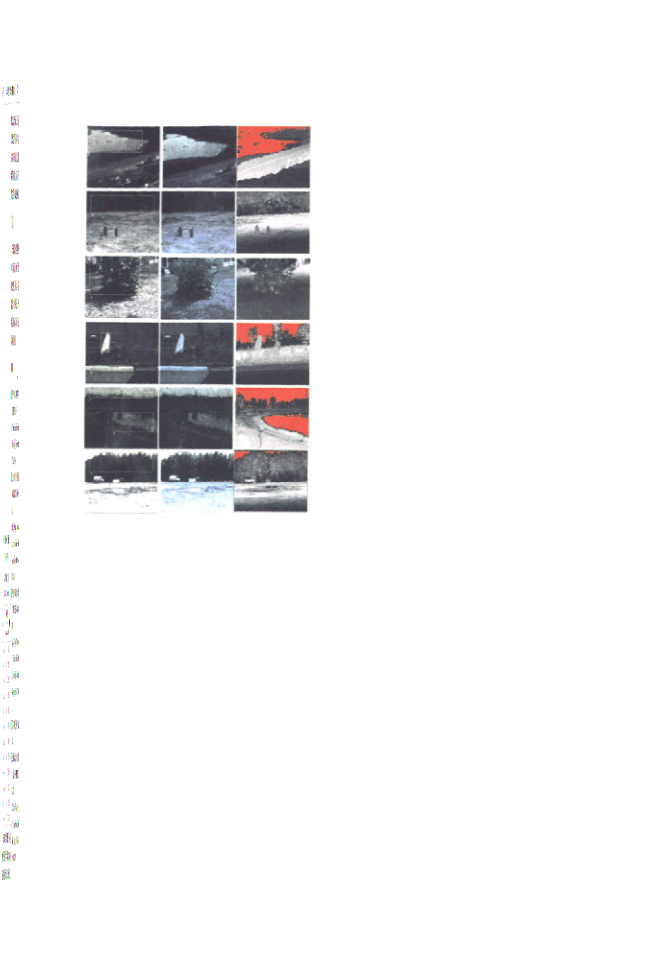
万方数据基于D-S证据理论的障碍目标身份识别赵一兵,王荣本,李琳辉,郭烈吉林大学学报(工学版)摘要:以越野环境中典型的障碍物为识别目标,选用单目视觉与激光扫描仪建立融合系统,基于胁S证据理论融合多传感器信息,实现UGV对障碍目标的身份识别。首先将每个传感器的观测数据从观测空闻变换到证据空间,对每种身份分配一个基本概率赋值;融合系统再根据Dempster组合规则计算各个命题组合后的概率赋值函数和相应的信任度区间,然后计算综合概率赋值函数和信任度区问;最后根据计算结果和决策规则进行障碍身份识别。试验表明:该方

基于统计证据的Mass函数和DS证据理论的多传感器目标识别.pdf
万方数据基于统计证据的Mass函数和D—S证据理论的多传感器目标识别传感技术学报and伊S1胁S证据理论MultisensorMassEVid吼ce王俊林1,张剑云2第19卷第3期Statisticalhstf£“招o,PLA,H咖f文章编号:1004-1699(2006)03.0862-03目前,在目标识别级融合中,Dempster_Shafer(简称DS)证据理论和Bayes方法是两种常用的不确定性推理方法。DS证据理论采用信任函数而不是概率作为度量,在不需知道先验概率的情况下,进行不确定性推理,因而

基于证据理论的目标综合识别.docx
基于证据理论的目标综合识别目标综合识别是指在复杂情况下的目标识别,其中涉及到多个传感器数据,目标类型的多样性以及环境干扰等问题。传统的目标识别方法往往是将目标的各种信息单独进行处理,而且往往只能在特定场景下使用。为了解决这一问题,科研人员提出了基于证据理论的目标综合识别方法,该方法可以获取各个传感器的数据后,将这些数据进行融合,最终实现目标的准确识别和跟踪。本文将从概念、原理、方法以及应用四个方面进行探讨。一、概念证据理论是20世纪60年代由美国数学家Schafer提出,其本质是用“证据”来描述不确定的信

基于证据理论的目标识别方法.docx
基于证据理论的目标识别方法基于证据理论的目标识别方法摘要:随着计算机视觉技术的快速发展,目标识别在很多领域中得到了广泛应用。然而,由于图像中噪声、光照变化和遮挡等因素的存在,目标识别的精度和鲁棒性仍然是一个挑战。本论文就基于证据理论的目标识别方法进行了研究,通过对不同特征的融合和推理,提高了目标识别的准确性和可靠性。1.引言目标识别是计算机视觉领域的一个重要研究方向,其在视频监控、智能交通系统和人机交互等领域中有广泛的应用。然而,由于图像的复杂性和不确定性,传统的目标识别方法往往存在一定的局限性。因此,提

信标漂移场景下基于加权DS证据理论的目标定位.docx
信标漂移场景下基于加权DS证据理论的目标定位标题:基于加权DS证据理论的信标漂移场景下目标定位摘要:随着智能定位技术的快速发展,目标定位已经成为许多应用领域的关键技术之一。然而,在信标漂移场景下,目标定位面临着许多挑战,如信标的位置不固定、信标传感器的误差等。为了解决这些问题,本文提出了一种基于加权DS证据理论的目标定位方法。通过对漂移信标的传感器测量数据进行处理和融合,我们可以提高在漂移场景下目标定位的精确性和鲁棒性。关键词:目标定位、信标漂移、加权DS证据理论、传感器测量数据引言:目标定位是指确定目标